 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHUANet: Hard-Constrained Unrolled ADMM for Constrained Convex Optimization
Apr 14, 2026This paper presents HUANet, a constrained deep neural network architecture that unrolls the iterations of the Alternating Direction Method of Multipliers (ADMM) into a trainable neural network for solving constrained convex optimization problems. Existing end-to-end learning methods operate as black-box mappings from parameters to solutions, often lacking explicit optimality principles and failing to enforce constraints. To address this limitation, we unroll ADMM and embed a hard-constrained neural network at each iteration to accelerate the algorithm, where equality constraints are enforced via a differentiable correction stage at the network output. Furthermore, we incorporate first-order optimality conditions as soft constraints during training to promote the convergence of the proposed unrolled algorithm. Extensive numerical experiments are conducted to validate the effectiveness of the proposed architecture for constrained optimization problems.
Structure- and Stability-Preserving Learning of Port-Hamiltonian Systems
Apr 14, 2026This paper investigates the problem of data-driven modeling of port-Hamiltonian systems while preserving their intrinsic Hamiltonian structure and stability properties. We propose a novel neural-network-based port-Hamiltonian modeling technique that relaxes the convexity constraint commonly imposed by neural network-based Hamiltonian approximations, thereby improving the expressiveness and generalization capability of the model. By removing this restriction, the proposed approach enables the use of more general non-convex Hamiltonian representations to enhance modeling flexibility and accuracy. Furthermore, the proposed method incorporates information about stable equilibria into the learning process, allowing the learned model to preserve the stability of multiple isolated equilibria rather than being restricted to a single equilibrium as in conventional methods. Two numerical experiments are conducted to validate the effectiveness of the proposed approach and demonstrate its ability to achieve more accurate structure- and stability-preserving learning of port-Hamiltonian systems compared with a baseline method.
SIT-LMPC: Safe Information-Theoretic Learning Model Predictive Control for Iterative Tasks
Feb 18, 2026Robots executing iterative tasks in complex, uncertain environments require control strategies that balance robustness, safety, and high performance. This paper introduces a safe information-theoretic learning model predictive control (SIT-LMPC) algorithm for iterative tasks. Specifically, we design an iterative control framework based on an information-theoretic model predictive control algorithm to address a constrained infinite-horizon optimal control problem for discrete-time nonlinear stochastic systems. An adaptive penalty method is developed to ensure safety while balancing optimality. Trajectories from previous iterations are utilized to learn a value function using normalizing flows, which enables richer uncertainty modeling compared to Gaussian priors. SIT-LMPC is designed for highly parallel execution on graphics processing units, allowing efficient real-time optimization. Benchmark simulations and hardware experiments demonstrate that SIT-LMPC iteratively improves system performance while robustly satisfying system constraints.
* 8 pages, 5 figures. Published in IEEE RA-L, vol. 11, no. 1, Jan. 2026. Presented at ICRA 2026
$\partial$CBDs: Differentiable Causal Block Diagrams
Feb 07, 2026Modern cyber-physical systems (CPS) integrate physics, computation, and learning, demanding modeling frameworks that are simultaneously composable, learnable, and verifiable. Yet existing approaches treat these goals in isolation: causal block diagrams (CBDs) support modular system interconnections but lack differentiability for learning; differentiable programming (DP) enables end-to-end gradient-based optimization but provides limited correctness guarantees; while contract-based verification frameworks remain largely disconnected from data-driven model refinement. To address these limitations, we introduce differentiable causal block diagrams ($\partial$CBDs), a unifying formalism that integrates these three perspectives. Our approach (i) retains the compositional structure and execution semantics of CBDs, (ii) incorporates assume--guarantee (A--G) contracts for modular correctness reasoning, and (iii) introduces residual-based contracts as differentiable, trajectory-level certificates compatible with automatic differentiation (AD), enabling gradient-based optimization and learning. Together, these elements enable a scalable, verifiable, and trainable modeling pipeline that preserves causality and modularity while supporting data-, physics-, and constraint-informed optimization for CPS.
Spatially temporally distributed informative path planning for multi-robot systems
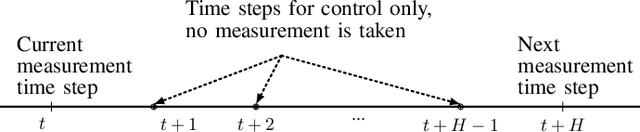
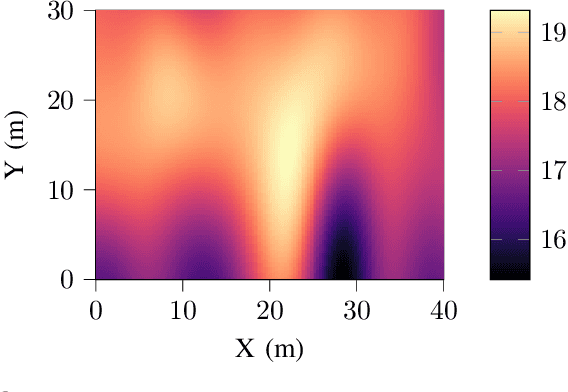
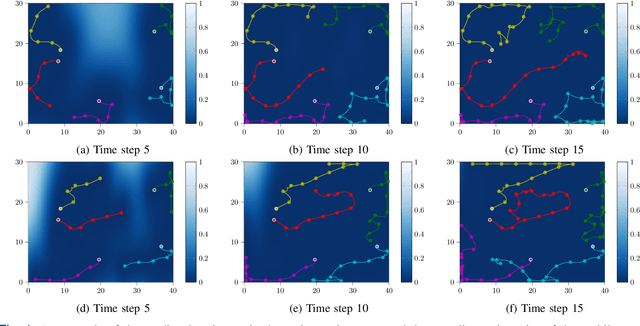
Mar 25, 2024This paper investigates the problem of informative path planning for a mobile robotic sensor network in spatially temporally distributed mapping. The robots are able to gather noisy measurements from an area of interest during their movements to build a Gaussian Process (GP) model of a spatio-temporal field. The model is then utilized to predict the spatio-temporal phenomenon at different points of interest. To spatially and temporally navigate the group of robots so that they can optimally acquire maximal information gains while their connectivity is preserved, we propose a novel multistep prediction informative path planning optimization strategy employing our newly defined local cost functions. By using the dual decomposition method, it is feasible and practical to effectively solve the optimization problem in a distributed manner. The proposed method was validated through synthetic experiments utilizing real-world data sets.
Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems
Jun 24, 2023Physics-informed machine learning (PIML) is a set of methods and tools that systematically integrate machine learning (ML) algorithms with physical constraints and abstract mathematical models developed in scientific and engineering domains. As opposed to purely data-driven methods, PIML models can be trained from additional information obtained by enforcing physical laws such as energy and mass conservation. More broadly, PIML models can include abstract properties and conditions such as stability, convexity, or invariance. The basic premise of PIML is that the integration of ML and physics can yield more effective, physically consistent, and data-efficient models. This paper aims to provide a tutorial-like overview of the recent advances in PIML for dynamical system modeling and control. Specifically, the paper covers an overview of the theory, fundamental concepts and methods, tools, and applications on topics of: 1) physics-informed learning for system identification; 2) physics-informed learning for control; 3) analysis and verification of PIML models; and 4) physics-informed digital twins. The paper is concluded with a perspective on open challenges and future research opportunities.
Ensemble Gaussian Processes for Adaptive Autonomous Driving on Multi-friction Surfaces
Mar 23, 2023



Driving under varying road conditions is challenging, especially for autonomous vehicles that must adapt in real-time to changes in the environment, e.g., rain, snow, etc. It is difficult to apply offline learning-based methods in these time-varying settings, as the controller should be trained on datasets representing all conditions it might encounter in the future. While online learning may adapt a model from real-time data, its convergence is often too slow for fast varying road conditions. We study this problem in autonomous racing, where driving at the limits of handling under varying road conditions is required for winning races. We propose a computationally-efficient approach that leverages an ensemble of Gaussian processes (GPs) to generalize and adapt pre-trained GPs to unseen conditions. Each GP is trained on driving data with a different road surface friction. A time-varying convex combination of these GPs is used within a model predictive control (MPC) framework, where the model weights are adapted online to the current road condition based on real-time data. The predictive variance of the ensemble Gaussian process (EGP) model allows the controller to account for prediction uncertainty and enables safe autonomous driving. Extensive simulations of a full scale autonomous car demonstrated the effectiveness of our proposed EGP-MPC method for providing good tracking performance in varying road conditions and the ability to generalize to unknown maps.
ADMM-based Adaptive Sampling Strategy for Nonholonomic Mobile Robotic Sensor Networks
Jan 27, 2021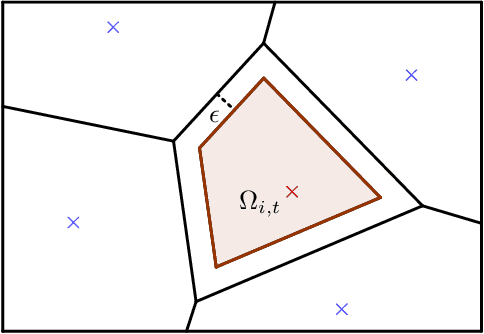
This paper discusses the adaptive sampling problem in a nonholonomic mobile robotic sensor network for efficiently monitoring a spatial field. It is proposed to employ Gaussian process to model a spatial phenomenon and predict it at unmeasured positions, which enables the sampling optimization problem to be formulated by the use of the log determinant of a predicted covariance matrix at next sampling locations. The control, movement and nonholonomic dynamics constraints of the mobile sensors are also considered in the adaptive sampling optimization problem. In order to tackle the nonlinearity and nonconvexity of the objective function in the optimization problem we first exploit the linearized alternating direction method of multipliers (L-ADMM) method that can effectively simplify the objective function, though it is computationally expensive since a nonconvex problem needs to be solved exactly in each iteration. We then propose a novel approach called the successive convexified ADMM (SC-ADMM) that sequentially convexify the nonlinear dynamic constraints so that the original optimization problem can be split into convex subproblems. It is noted that both the L-ADMM algorithm and our SC-ADMM approach can solve the sampling optimization problem in either a centralized or a distributed manner. We validated the proposed approaches in 1000 experiments in a synthetic environment with a real-world dataset, where the obtained results suggest that both the L-ADMM and SC- ADMM techniques can provide good accuracy for the monitoring purpose. However, our proposed SC-ADMM approach computationally outperforms the L-ADMM counterpart, demonstrating its better practicality.