 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStroke Modeling Enables Vectorized Character Generation with Large Vectorized Glyph Model
Nov 14, 2025



Vectorized glyphs are widely used in poster design, network animation, art display, and various other fields due to their scalability and flexibility. In typography, they are often seen as special sequences composed of ordered strokes. This concept extends to the token sequence prediction abilities of large language models (LLMs), enabling vectorized character generation through stroke modeling. In this paper, we propose a novel Large Vectorized Glyph Model (LVGM) designed to generate vectorized Chinese glyphs by predicting the next stroke. Initially, we encode strokes into discrete latent variables called stroke embeddings. Subsequently, we train our LVGM via fine-tuning DeepSeek LLM by predicting the next stroke embedding. With limited strokes given, it can generate complete characters, semantically elegant words, and even unseen verses in vectorized form. Moreover, we release a new large-scale Chinese SVG dataset containing 907,267 samples based on strokes for dynamically vectorized glyph generation. Experimental results show that our model has scaling behaviors on data scales. Our generated vectorized glyphs have been validated by experts and relevant individuals.
On Path to Multimodal Historical Reasoning: HistBench and HistAgent
May 26, 2025Recent advances in large language models (LLMs) have led to remarkable progress across domains, yet their capabilities in the humanities, particularly history, remain underexplored. Historical reasoning poses unique challenges for AI, involving multimodal source interpretation, temporal inference, and cross-linguistic analysis. While general-purpose agents perform well on many existing benchmarks, they lack the domain-specific expertise required to engage with historical materials and questions. To address this gap, we introduce HistBench, a new benchmark of 414 high-quality questions designed to evaluate AI's capacity for historical reasoning and authored by more than 40 expert contributors. The tasks span a wide range of historical problems-from factual retrieval based on primary sources to interpretive analysis of manuscripts and images, to interdisciplinary challenges involving archaeology, linguistics, or cultural history. Furthermore, the benchmark dataset spans 29 ancient and modern languages and covers a wide range of historical periods and world regions. Finding the poor performance of LLMs and other agents on HistBench, we further present HistAgent, a history-specific agent equipped with carefully designed tools for OCR, translation, archival search, and image understanding in History. On HistBench, HistAgent based on GPT-4o achieves an accuracy of 27.54% pass@1 and 36.47% pass@2, significantly outperforming LLMs with online search and generalist agents, including GPT-4o (18.60%), DeepSeek-R1(14.49%) and Open Deep Research-smolagents(20.29% pass@1 and 25.12% pass@2). These results highlight the limitations of existing LLMs and generalist agents and demonstrate the advantages of HistAgent for historical reasoning.
Learning a Terrain- and Robot-Aware Dynamics Model for Autonomous Mobile Robot Navigation
Sep 17, 2024



Mobile robots should be capable of planning cost-efficient paths for autonomous navigation. Typically, the terrain and robot properties are subject to variations. For instance, properties of the terrain such as friction may vary across different locations. Also, properties of the robot may change such as payloads or wear and tear, e.g., causing changing actuator gains or joint friction. Autonomous navigation approaches should thus be able to adapt to such variations. In this article, we propose a novel approach for learning a probabilistic, terrain- and robot-aware forward dynamics model (TRADYN) which can adapt to such variations and demonstrate its use for navigation. Our learning approach extends recent advances in meta-learning forward dynamics models based on Neural Processes for mobile robot navigation. We evaluate our method in simulation for 2D navigation of a robot with uni-cycle dynamics with varying properties on terrain with spatially varying friction coefficients. In our experiments, we demonstrate that TRADYN has lower prediction error over long time horizons than model ablations which do not adapt to robot or terrain variations. We also evaluate our model for navigation planning in a model-predictive control framework and under various sources of noise. We demonstrate that our approach yields improved performance in planning control-efficient paths by taking robot and terrain properties into account.
Exploring Mathematical Extrapolation of Large Language Models with Synthetic Data
Jun 04, 2024



Large Language Models (LLMs) have shown excellent performance in language understanding, text generation, code synthesis, and many other tasks, while they still struggle in complex multi-step reasoning problems, such as mathematical reasoning. In this paper, through a newly proposed arithmetical puzzle problem, we show that the model can perform well on multi-step reasoning tasks via fine-tuning on high-quality synthetic data. Experimental results with the open-llama-3B model on three different test datasets show that not only the model can reach a zero-shot pass@1 at 0.44 on the in-domain dataset, it also demonstrates certain generalization capabilities on the out-of-domain datasets. Specifically, this paper has designed two out-of-domain datasets in the form of extending the numerical range and the composing components of the arithmetical puzzle problem separately. The fine-tuned models have shown encouraging performance on these two far more difficult tasks with the zero-shot pass@1 at 0.33 and 0.35, respectively.
Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry
Sep 21, 2023



Wheeled mobile robots need the ability to estimate their motion and the effect of their control actions for navigation planning. In this paper, we present ST-VIO, a novel approach which tightly fuses a single-track dynamics model for wheeled ground vehicles with visual inertial odometry. Our method calibrates and adapts the dynamics model online and facilitates accurate forward prediction conditioned on future control inputs. The single-track dynamics model approximates wheeled vehicle motion under specific control inputs on flat ground using ordinary differential equations. We use a singularity-free and differentiable variant of the single-track model to enable seamless integration as dynamics factor into VIO and to optimize the model parameters online together with the VIO state variables. We validate our method with real-world data in both indoor and outdoor environments with different terrain types and wheels. In our experiments, we demonstrate that our ST-VIO can not only adapt to the change of the environments and achieve accurate prediction under new control inputs, but even improves the tracking accuracy. Supplementary video: https://youtu.be/BuGY1L1FRa4.
Context-Conditional Navigation with a Learning-Based Terrain- and Robot-Aware Dynamics Model
Jul 20, 2023



In autonomous navigation settings, several quantities can be subject to variations. Terrain properties such as friction coefficients may vary over time depending on the location of the robot. Also, the dynamics of the robot may change due to, e.g., different payloads, changing the system's mass, or wear and tear, changing actuator gains or joint friction. An autonomous agent should thus be able to adapt to such variations. In this paper, we develop a novel probabilistic, terrain- and robot-aware forward dynamics model, termed TRADYN, which is able to adapt to the above-mentioned variations. It builds on recent advances in meta-learning forward dynamics models based on Neural Processes. We evaluate our method in a simulated 2D navigation setting with a unicycle-like robot and different terrain layouts with spatially varying friction coefficients. In our experiments, the proposed model exhibits lower prediction error for the task of long-horizon trajectory prediction, compared to non-adaptive ablation models. We also evaluate our model on the downstream task of navigation planning, which demonstrates improved performance in planning control-efficient paths by taking robot and terrain properties into account.
Event-based Non-Rigid Reconstruction from Contours
Oct 12, 2022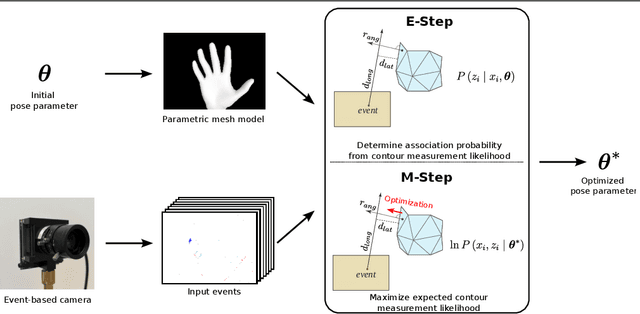
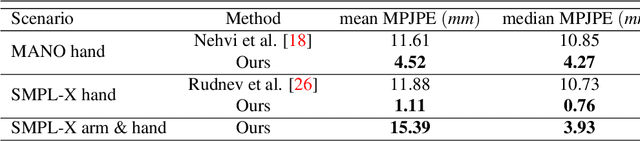
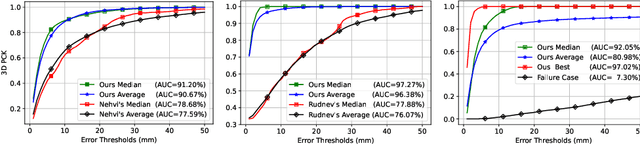
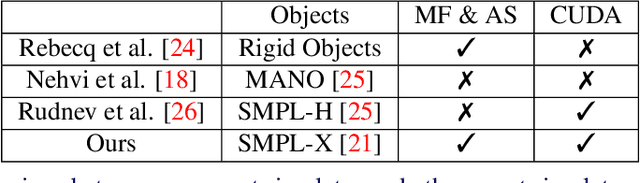
Visual reconstruction of fast non-rigid object deformations over time is a challenge for conventional frame-based cameras. In this paper, we propose a novel approach for reconstructing such deformations using measurements from event-based cameras. Under the assumption of a static background, where all events are generated by the motion, our approach estimates the deformation of objects from events generated at the object contour in a probabilistic optimization framework. It associates events to mesh faces on the contour and maximizes the alignment of the line of sight through the event pixel with the associated face. In experiments on synthetic and real data, we demonstrate the advantages of our method over state-of-the-art optimization and learning-based approaches for reconstructing the motion of human hands. A video of the experiments is available at https://youtu.be/gzfw7i5OKjg
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Oct 10, 2022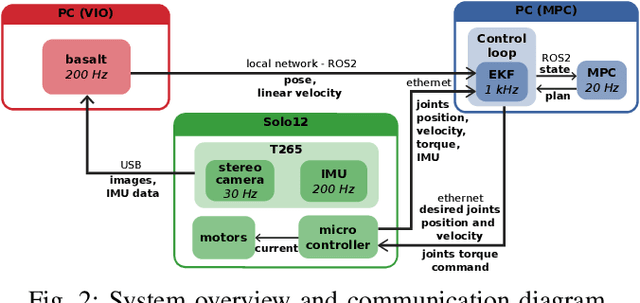
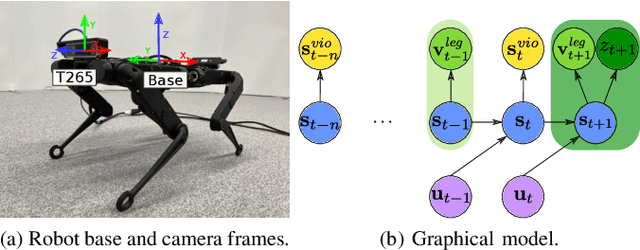
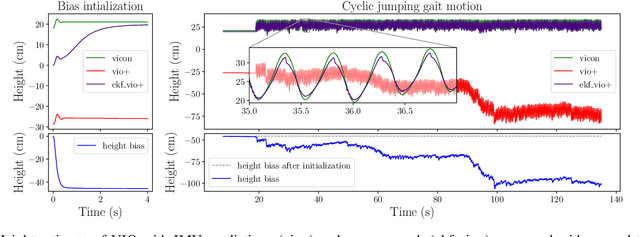
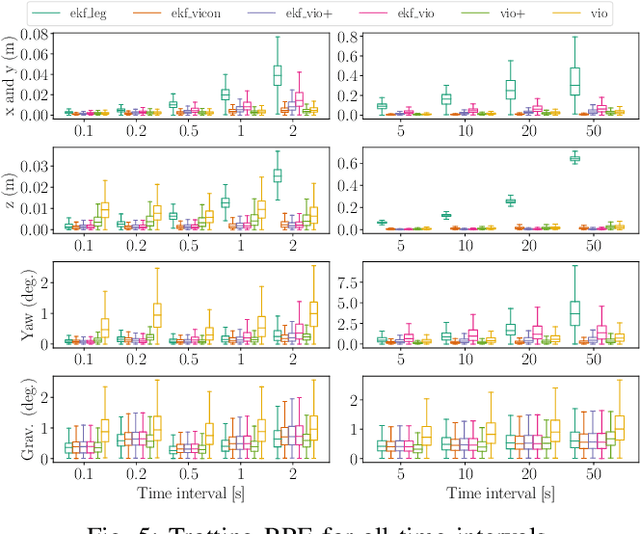
Implementing dynamic locomotion behaviors on legged robots requires a high-quality state estimation module. Especially when the motion includes flight phases, state-of-the-art approaches fail to produce reliable estimation of the robot posture, in particular base height. In this paper, we propose a novel approach for combining visual-inertial odometry (VIO) with leg odometry in an extended Kalman filter (EKF) based state estimator. The VIO module uses a stereo camera and IMU to yield low-drift 3D position and yaw orientation and drift-free pitch and roll orientation of the robot base link in the inertial frame. However, these values have a considerable amount of latency due to image processing and optimization, while the rate of update is quite low which is not suitable for low-level control. To reduce the latency, we predict the VIO state estimate at the rate of the IMU measurements of the VIO sensor. The EKF module uses the base pose and linear velocity predicted by VIO, fuses them further with a second high-rate IMU and leg odometry measurements, and produces robot state estimates with a high frequency and small latency suitable for control. We integrate this lightweight estimation framework with a nonlinear model predictive controller and show successful implementation of a set of agile locomotion behaviors, including trotting and jumping at varying horizontal speeds, on a torque-controlled quadruped robot.
Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
Apr 22, 2022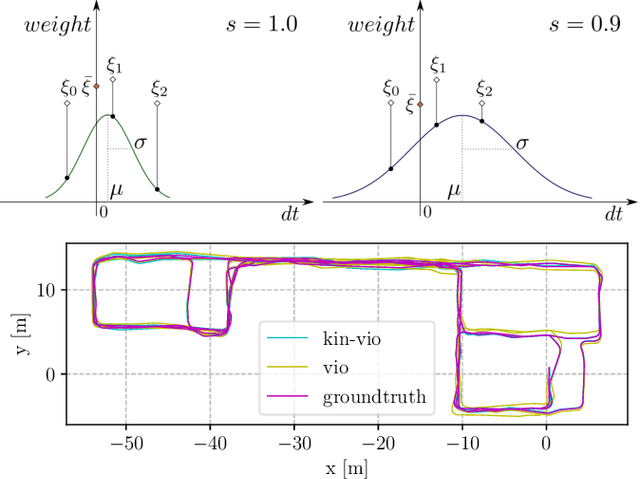
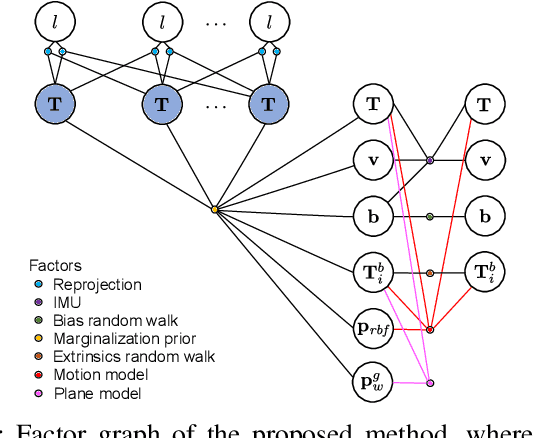
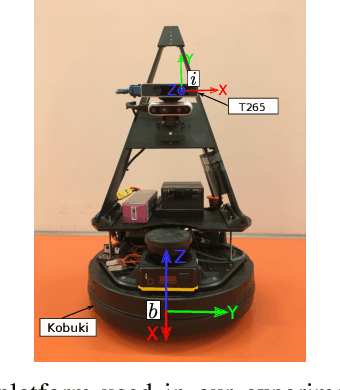
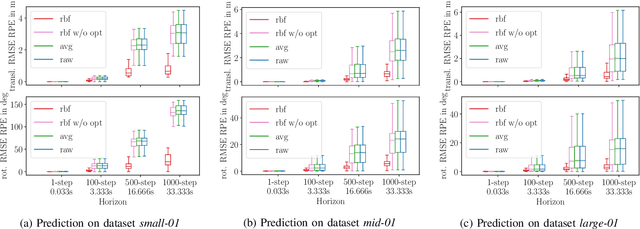
Visual-inertial odometry (VIO) is an important technology for autonomous robots with power and payload constraints. In this paper, we propose a novel approach for VIO with stereo cameras which integrates and calibrates the velocity-control based kinematic motion model of wheeled mobile robots online. Including such a motion model can help to improve the accuracy of VIO. Compared to several previous approaches proposed to integrate wheel odometer measurements for this purpose, our method does not require wheel encoders and can be applied when the robot motion can be modeled with velocity-control based kinematic motion model. We use radial basis function (RBF) kernels to compensate for the time delay and deviations between control commands and actual robot motion. The motion model is calibrated online by the VIO system and can be used as a forward model for motion control and planning. We evaluate our approach with data obtained in variously sized indoor environments, demonstrate improvements over a pure VIO method, and evaluate the prediction accuracy of the online calibrated model.
Observability Analysis of Visual-Inertial Odometry with Online Calibration of Velocity-Control Based Kinematic Motion Models
Apr 13, 2022In this paper, we analyze the observability of the visual-inertial odometry (VIO) using stereo cameras with a velocity-control based kinematic motion model. Previous work shows that in general case the global position and yaw are unobservable in VIO system, additionally the roll and pitch become also unobservable if there is no rotation. We prove that by integrating a planar motion constraint roll and pitch become observable. We also show that the parameters of the motion model are observable.