 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Multi-Task Policy Learning from NMPC for Quadruped Locomotion
May 13, 2025



Quadruped robots excel in traversing complex, unstructured environments where wheeled robots often fail. However, enabling efficient and adaptable locomotion remains challenging due to the quadrupeds' nonlinear dynamics, high degrees of freedom, and the computational demands of real-time control. Optimization-based controllers, such as Nonlinear Model Predictive Control (NMPC), have shown strong performance, but their reliance on accurate state estimation and high computational overhead makes deployment in real-world settings challenging. In this work, we present a Multi-Task Learning (MTL) framework in which expert NMPC demonstrations are used to train a single neural network to predict actions for multiple locomotion behaviors directly from raw proprioceptive sensor inputs. We evaluate our approach extensively on the quadruped robot Go1, both in simulation and on real hardware, demonstrating that it accurately reproduces expert behavior, allows smooth gait switching, and simplifies the control pipeline for real-time deployment. Our MTL architecture enables learning diverse gaits within a unified policy, achieving high $R^{2}$ scores for predicted joint targets across all tasks.
DogLegs: Robust Proprioceptive State Estimation for Legged Robots Using Multiple Leg-Mounted IMUs
Mar 06, 2025



Robust and accurate proprioceptive state estimation of the main body is crucial for legged robots to execute tasks in extreme environments where exteroceptive sensors, such as LiDARs and cameras may become unreliable. In this paper, we propose DogLegs, a state estimation system for legged robots that fuses the measurements from a body-mounted inertial measurement unit (Body-IMU), joint encoders, and multiple leg-mounted IMUs (Leg-IMU) using an extended Kalman filter (EKF). The filter system contains the error states of all IMU frames. The Leg-IMUs are used to detect foot contact, thereby providing zero velocity measurements to update the state of the Leg-IMU frames. Additionally, we compute the relative position constraints between the Body-IMU and Leg-IMUs by the leg kinematics and use them to update the main body state and reduce the error drift of the individual IMU frames. Field experimental results have shown that our proposed system can achieve better state estimation accuracy compared to the traditional leg odometry method (using only Body-IMU and joint encoders) across different terrains. We make our datasets publicly available to benefit the research community.
Physically-Consistent Parameter Identification of Robots in Contact
Sep 15, 2024



Accurate inertial parameter identification is crucial for the simulation and control of robots encountering intermittent contact with the environment. Classically, robots' inertial parameters are obtained from CAD models that are not precise (and sometimes not available, e.g., Spot from Boston Dynamics), hence requiring identification. To do that, existing methods require access to contact force measurement, a modality not present in modern quadruped and humanoid robots. This paper presents an alternative technique that utilizes joint current/torque measurements -- a standard sensing modality in modern robots -- to identify inertial parameters without requiring direct contact force measurements. By projecting the whole-body dynamics into the null space of contact constraints, we eliminate the dependency on contact forces and reformulate the identification problem as a linear matrix inequality that can handle physical and geometrical constraints. We compare our proposed method against a common black-box identification mrethod using a deep neural network and show that incorporating physical consistency significantly improves the sample efficiency and generalizability of the model. Finally, we validate our method on the Spot quadruped robot across various locomotion tasks, showcasing its accuracy and generalizability in real-world scenarios over different gaits.
Centroidal State Estimation based on the Koopman Embedding for Dynamic Legged Locomotion
Mar 20, 2024



In this paper, we introduce a novel approach to centroidal state estimation, which plays a crucial role in predictive model-based control strategies for dynamic legged locomotion. Our approach uses the Koopman operator theory to transform the robot's complex nonlinear dynamics into a linear system, by employing dynamic mode decomposition and deep learning for model construction. We evaluate both models on their linearization accuracy and capability to capture both fast and slow dynamic system responses. We then select the most suitable model for estimation purposes, and integrate it within a moving horizon estimator. This estimator is formulated as a convex quadratic program, to facilitate robust, real-time centroidal state estimation. Through extensive simulation experiments on a quadruped robot executing various dynamic gaits, our data-driven framework outperforms conventional filtering techniques based on nonlinear dynamics. Our estimator addresses challenges posed by force/torque measurement noise in highly dynamic motions and accurately recovers the centroidal states, demonstrating the adaptability and effectiveness of the Koopman-based linear representation for complex locomotive behaviors. Importantly, our model based on dynamic mode decomposition, trained with two locomotion patterns (trot and jump), successfully estimates the centroidal states for a different motion (bound) without retraining.
Perception for Humanoid Robots
Sep 27, 2023Purpose of Review: The field of humanoid robotics, perception plays a fundamental role in enabling robots to interact seamlessly with humans and their surroundings, leading to improved safety, efficiency, and user experience. This scientific study investigates various perception modalities and techniques employed in humanoid robots, including visual, auditory, and tactile sensing by exploring recent state-of-the-art approaches for perceiving and understanding the internal state, the environment, objects, and human activities. Recent Findings: Internal state estimation makes extensive use of Bayesian filtering methods and optimization techniques based on maximum a-posteriori formulation by utilizing proprioceptive sensing. In the area of external environment understanding, with an emphasis on robustness and adaptability to dynamic, unforeseen environmental changes, the new slew of research discussed in this study have focused largely on multi-sensor fusion and machine learning in contrast to the use of hand-crafted, rule-based systems. Human robot interaction methods have established the importance of contextual information representation and memory for understanding human intentions. Summary: This review summarizes the recent developments and trends in the field of perception in humanoid robots. Three main areas of application are identified, namely, internal state estimation, external environment estimation, and human robot interaction. The applications of diverse sensor modalities in each of these areas are considered and recent significant works are discussed.
Visual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Oct 10, 2022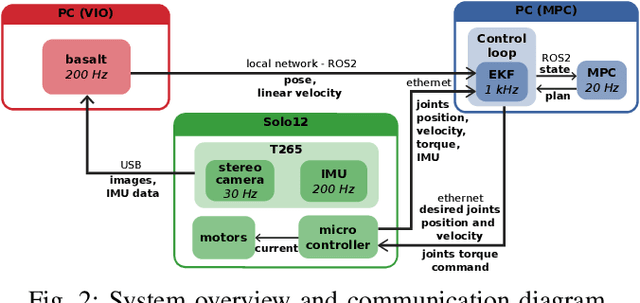
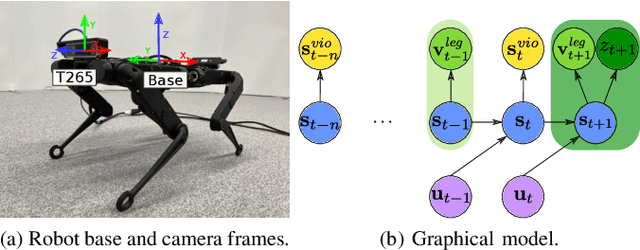
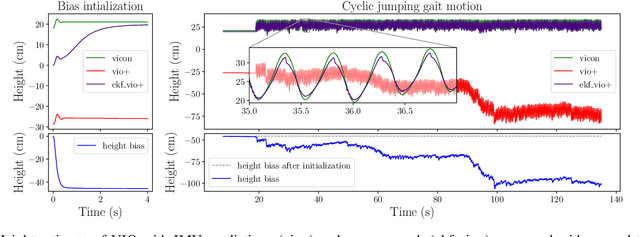
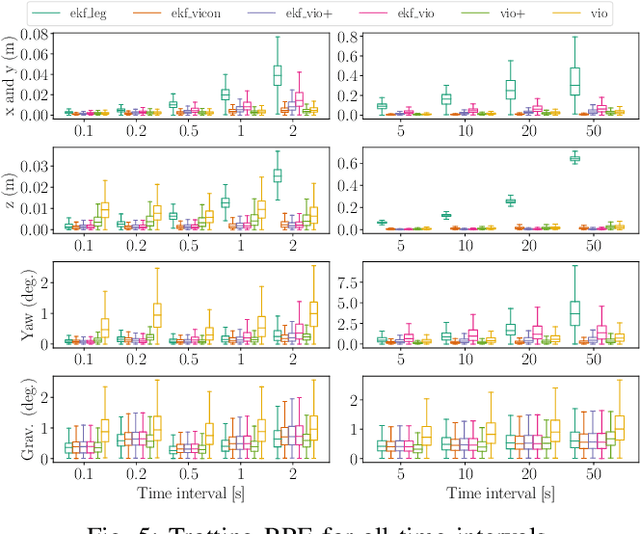
Implementing dynamic locomotion behaviors on legged robots requires a high-quality state estimation module. Especially when the motion includes flight phases, state-of-the-art approaches fail to produce reliable estimation of the robot posture, in particular base height. In this paper, we propose a novel approach for combining visual-inertial odometry (VIO) with leg odometry in an extended Kalman filter (EKF) based state estimator. The VIO module uses a stereo camera and IMU to yield low-drift 3D position and yaw orientation and drift-free pitch and roll orientation of the robot base link in the inertial frame. However, these values have a considerable amount of latency due to image processing and optimization, while the rate of update is quite low which is not suitable for low-level control. To reduce the latency, we predict the VIO state estimate at the rate of the IMU measurements of the VIO sensor. The EKF module uses the base pose and linear velocity predicted by VIO, fuses them further with a second high-rate IMU and leg odometry measurements, and produces robot state estimates with a high frequency and small latency suitable for control. We integrate this lightweight estimation framework with a nonlinear model predictive controller and show successful implementation of a set of agile locomotion behaviors, including trotting and jumping at varying horizontal speeds, on a torque-controlled quadruped robot.
On the Use of Torque Measurement in Centroidal State Estimation
Feb 25, 2022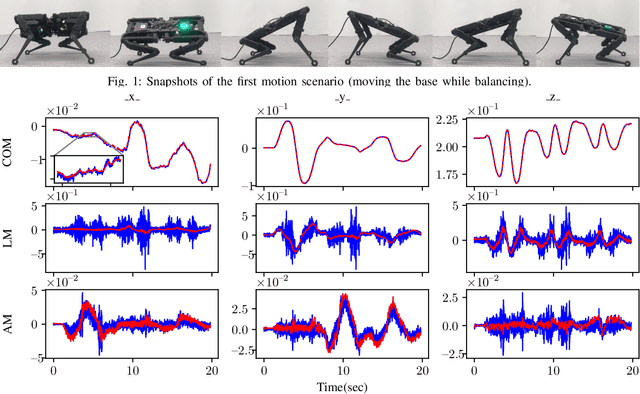
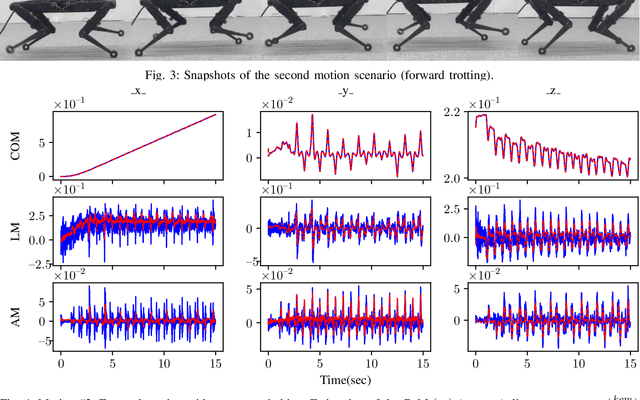
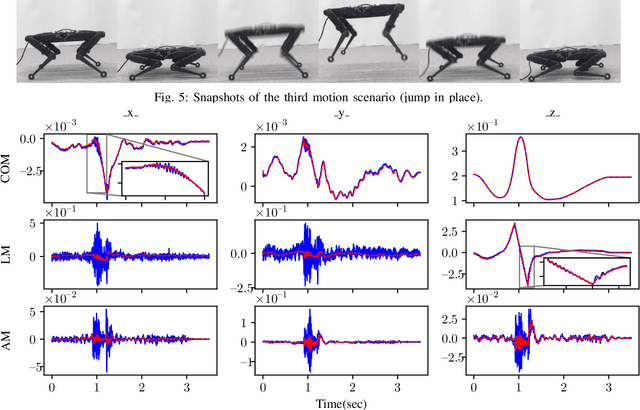
State of the art legged robots are either capable of measuring torque at the output of their drive systems, or have transparent drive systems which enable the computation of joint torques from motor currents. In either case, this sensor modality is seldom used in state estimation. In this paper, we propose to use joint torque measurements to estimate the centroidal states of legged robots. To do so, we project the whole-body dynamics of a legged robot into the nullspace of the contact constraints, allowing expression of the dynamics independent of the contact forces. Using the constrained dynamics and the centroidal momentum matrix, we are able to directly relate joint torques and centroidal states dynamics. Using the resulting model as the process model of an Extended Kalman Filter (EKF), we fuse the torque measurement in the centroidal state estimation problem. Through real-world experiments on a quadruped robot with different gaits, we demonstrate that the estimated centroidal states from our torque-based EKF drastically improve the estimation of these quantities compared to direct computation.