 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAH-Drive: A Scenario-Aware Hybrid Planner for Closed-Loop Vehicle Trajectory Generation
May 30, 2025Reliable planning is crucial for achieving autonomous driving. Rule-based planners are efficient but lack generalization, while learning-based planners excel in generalization yet have limitations in real-time performance and interpretability. In long-tail scenarios, these challenges make planning particularly difficult. To leverage the strengths of both rule-based and learning-based planners, we proposed the Scenario-Aware Hybrid Planner (SAH-Drive) for closed-loop vehicle trajectory planning. Inspired by human driving behavior, SAH-Drive combines a lightweight rule-based planner and a comprehensive learning-based planner, utilizing a dual-timescale decision neuron to determine the final trajectory. To enhance the computational efficiency and robustness of the hybrid planner, we also employed a diffusion proposal number regulator and a trajectory fusion module. The experimental results show that the proposed method significantly improves the generalization capability of the planning system, achieving state-of-the-art performance in interPlan, while maintaining computational efficiency without incurring substantial additional runtime.
Compressive hyperspectral imaging via adaptive sampling and dictionary learning
Dec 02, 2015
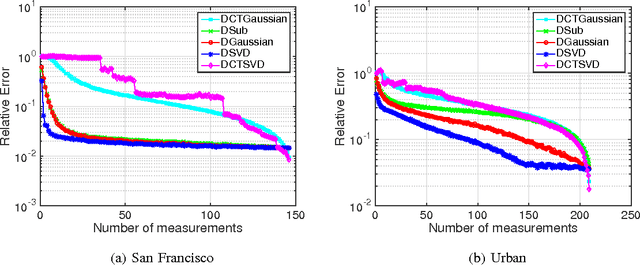
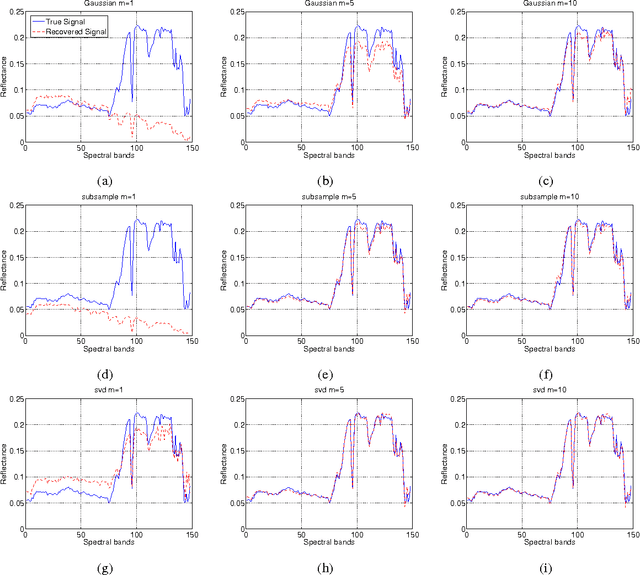
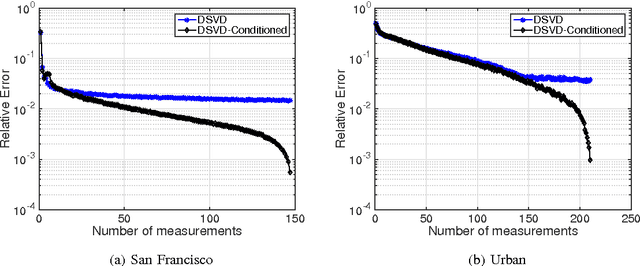
In this paper, we propose a new sampling strategy for hyperspectral signals that is based on dictionary learning and singular value decomposition (SVD). Specifically, we first learn a sparsifying dictionary from training spectral data using dictionary learning. We then perform an SVD on the dictionary and use the first few left singular vectors as the rows of the measurement matrix to obtain the compressive measurements for reconstruction. The proposed method provides significant improvement over the conventional compressive sensing approaches. The reconstruction performance is further improved by reconditioning the sensing matrix using matrix balancing. We also demonstrate that the combination of dictionary learning and SVD is robust by applying them to different datasets.