 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA User's Guide to Calibrating Robotics Simulators
Nov 17, 2020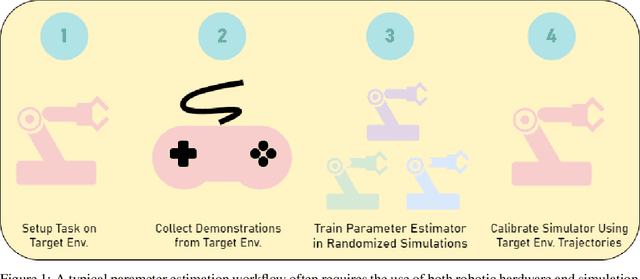
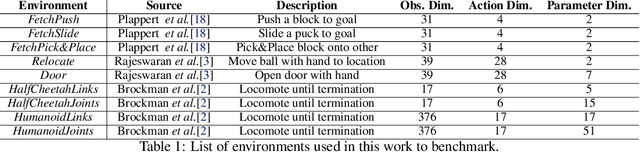

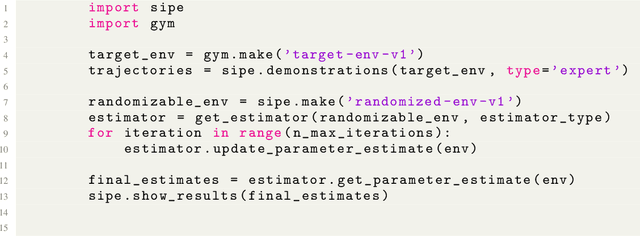
Simulators are a critical component of modern robotics research. Strategies for both perception and decision making can be studied in simulation first before deployed to real world systems, saving on time and costs. Despite significant progress on the development of sim-to-real algorithms, the analysis of different methods is still conducted in an ad-hoc manner, without a consistent set of tests and metrics for comparison. This paper fills this gap and proposes a set of benchmarks and a framework for the study of various algorithms aimed to transfer models and policies learnt in simulation to the real world. We conduct experiments on a wide range of well known simulated environments to characterize and offer insights into the performance of different algorithms. Our analysis can be useful for practitioners working in this area and can help make informed choices about the behavior and main properties of sim-to-real algorithms. We open-source the benchmark, training data, and trained models, which can be found at https://github.com/NVlabs/sim-parameter-estimation.
Fast Uncertainty Quantification for Deep Object Pose Estimation
Nov 16, 2020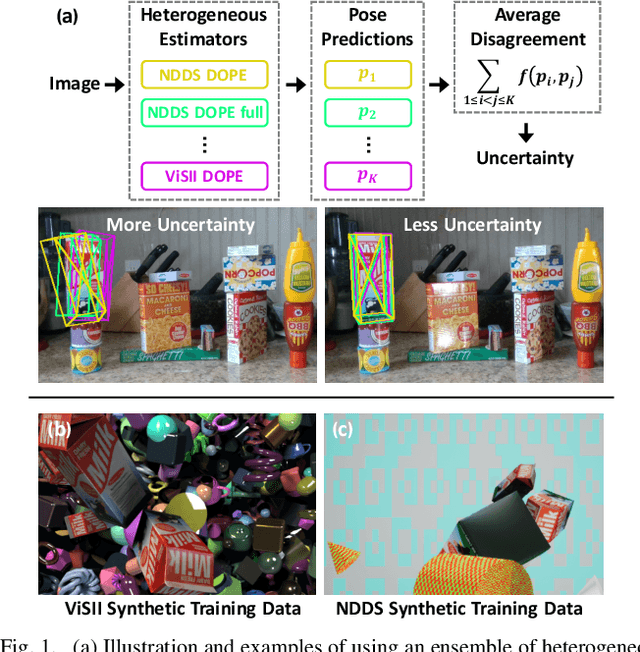
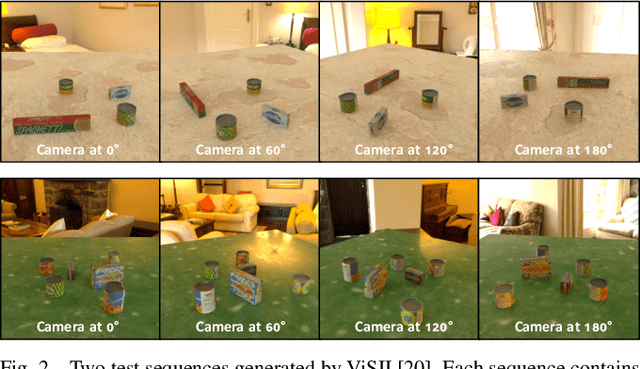
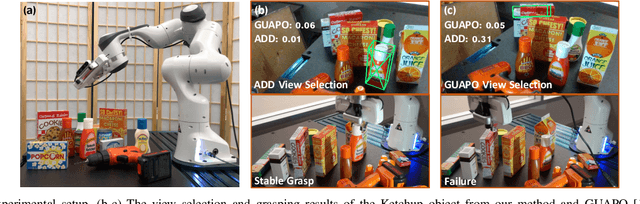
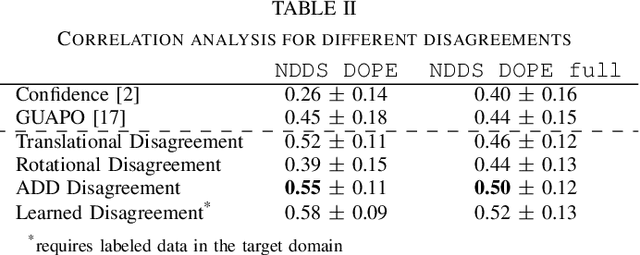
Deep learning-based object pose estimators are often unreliable and overconfident especially when the input image is outside the training domain, for instance, with sim2real transfer. Efficient and robust uncertainty quantification (UQ) in pose estimators is critically needed in many robotic tasks. In this work, we propose a simple, efficient, and plug-and-play UQ method for 6-DoF object pose estimation. We ensemble 2-3 pre-trained models with different neural network architectures and/or training data sources, and compute their average pairwise disagreement against one another to obtain the uncertainty quantification. We propose four disagreement metrics, including a learned metric, and show that the average distance (ADD) is the best learning-free metric and it is only slightly worse than the learned metric, which requires labeled target data. Our method has several advantages compared to the prior art: 1) our method does not require any modification of the training process or the model inputs; and 2) it needs only one forward pass for each model. We evaluate the proposed UQ method on three tasks where our uncertainty quantification yields much stronger correlations with pose estimation errors than the baselines. Moreover, in a real robot grasping task, our method increases the grasping success rate from 35% to 90%.
Anticipatory Navigation in Crowds by Probabilistic Prediction of Pedestrian Future Movements
Nov 12, 2020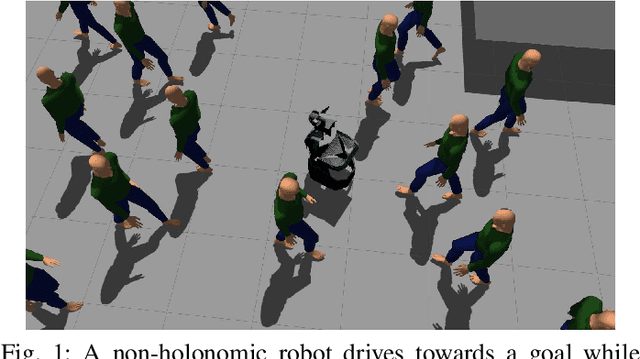
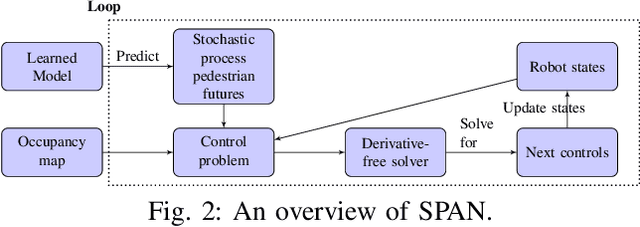
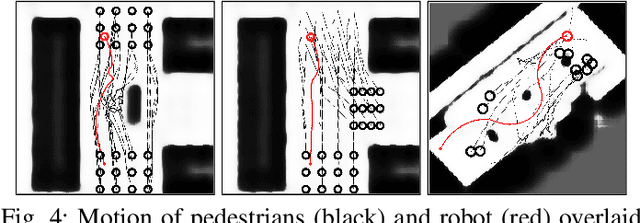
Critical for the coexistence of humans and robots in dynamic environments is the capability for agents to understand each other's actions, and anticipate their movements. This paper presents Stochastic Process Anticipatory Navigation (SPAN), a framework that enables nonholonomic robots to navigate in environments with crowds, while anticipating and accounting for the motion patterns of pedestrians. To this end, we learn a predictive model to predict continuous-time stochastic processes to model future movement of pedestrians. Anticipated pedestrian positions are used to conduct chance constrained collision-checking, and are incorporated into a time-to-collision control problem. An occupancy map is also integrated to allow for probabilistic collision-checking with static obstacles. We demonstrate the capability of SPAN in crowded simulation environments, as well as with a real-world pedestrian dataset.
STReSSD: Sim-To-Real from Sound for Stochastic Dynamics
Nov 05, 2020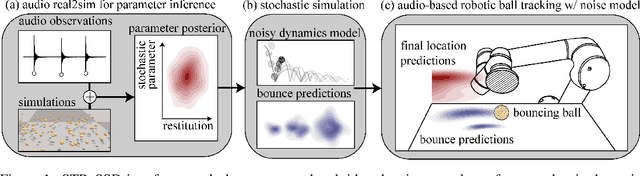
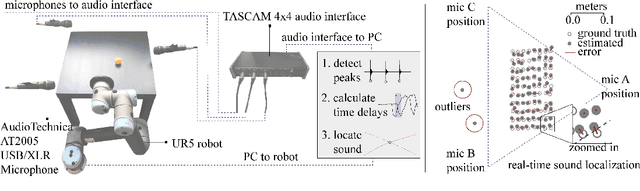
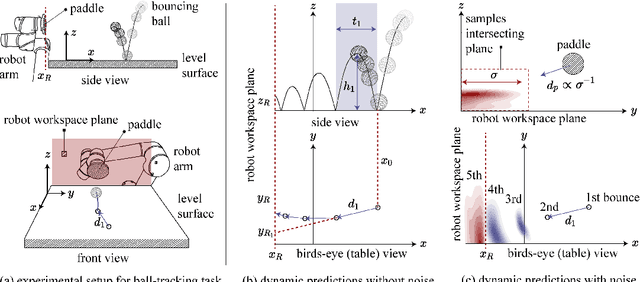
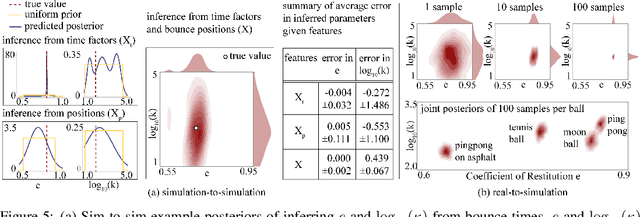
Sound is an information-rich medium that captures dynamic physical events. This work presents STReSSD, a framework that uses sound to bridge the simulation-to-reality gap for stochastic dynamics, demonstrated for the canonical case of a bouncing ball. A physically-motivated noise model is presented to capture stochastic behavior of the balls upon collision with the environment. A likelihood-free Bayesian inference framework is used to infer the parameters of the noise model, as well as a material property called the coefficient of restitution, from audio observations. The same inference framework and the calibrated stochastic simulator are then used to learn a probabilistic model of ball dynamics. The predictive capabilities of the dynamics model are tested in two robotic experiments. First, open-loop predictions anticipate probabilistic success of bouncing a ball into a cup. The second experiment integrates audio perception with a robotic arm to track and deflect a bouncing ball in real-time. We envision that this work is a step towards integrating audio-based inference for dynamic robotic tasks. Experimental results can be viewed at https://youtu.be/b7pOrgZrArk.
Learning to Plan Optimally with Flow-based Motion Planner
Oct 21, 2020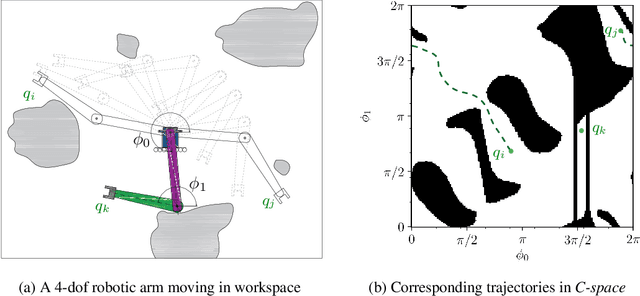
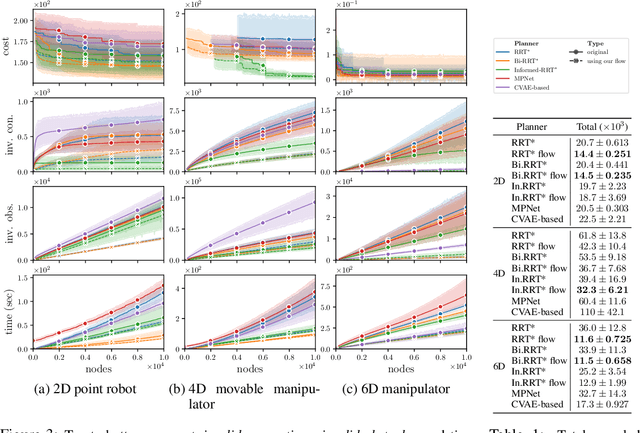
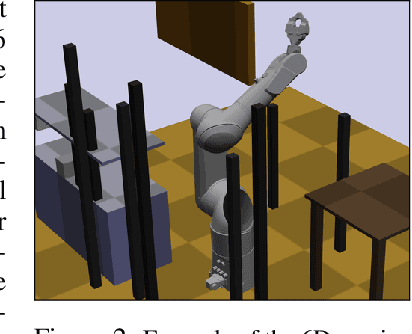
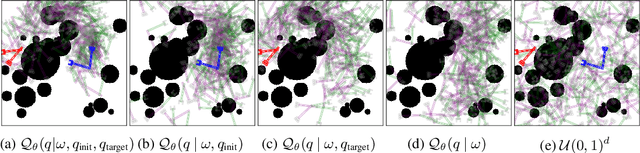
Sampling-based motion planning is the predominant paradigm in many real-world robotic applications, but its performance is immensely dependent on the quality of the samples. The majority of traditional planners are inefficient as they use uninformative sampling distributions as opposed to exploiting structures and patterns in the problem to guide better sampling strategies. Moreover, most current learning-based planners are susceptible to posterior collapse or mode collapse due to the sparsity and highly varying nature of C-Space and motion plan configurations. In this work, we introduce a conditional normalising flow based distribution learned through previous experiences to improve sampling of these methods. Our distribution can be conditioned on the current problem instance to provide an informative prior for sampling configurations within promising regions. When we train our sampler with an expert planner, the resulting distribution is often near-optimal, and the planner can find a solution faster, with less invalid samples, and less initial cost. The normalising flow based distribution uses simple invertible transformations that are very computationally efficient, and our optimisation formulation explicitly avoids mode collapse in contrast to other existing learning-based planners. Finally, we provide a formulation and theoretical foundation to efficiently sample from the distribution; and demonstrate experimentally that, by using our normalising flow based distribution, a solution can be found faster, with less samples and better overall runtime performance.
Multi-Objective Bayesian Optimisation and Joint Inversion for Active Sensor Fusion
Oct 12, 2020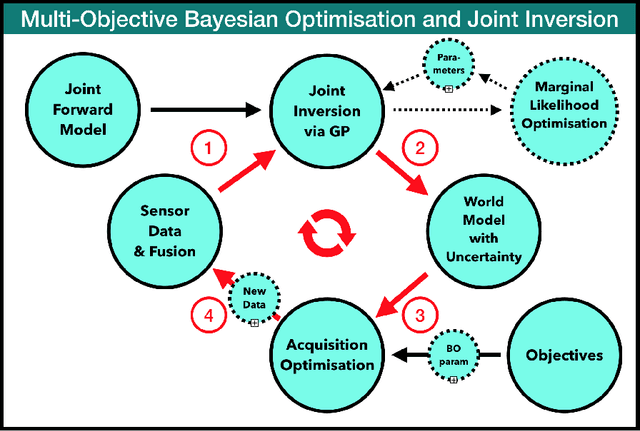
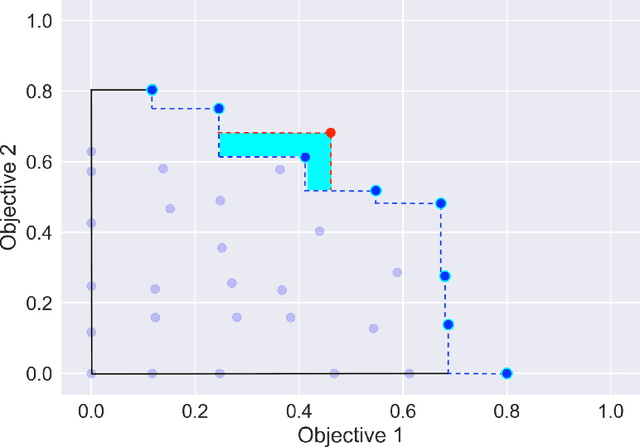
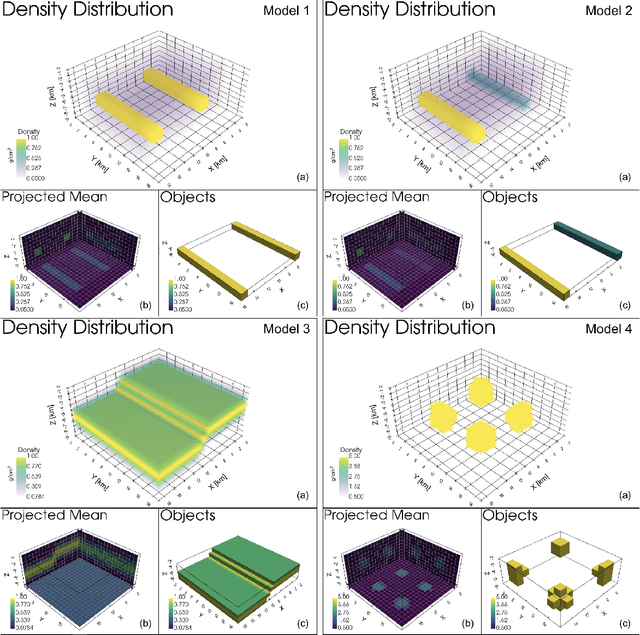
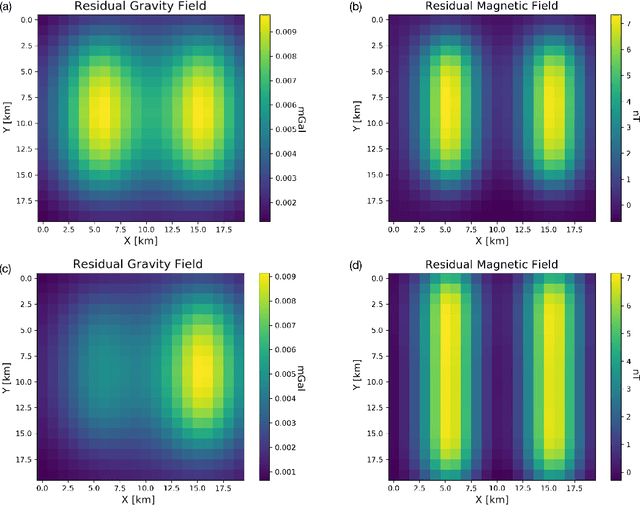
A critical decision process in data acquisition for mineral and energy resource exploration is how to efficiently combine a variety of sensor types and to minimize total cost. We propose a probabilistic framework for multi-objective optimisation and inverse problems given an expensive cost function for allocating new measurements. This new method is devised to jointly solve multi-linear forward models of 2D-sensor data and 3D-geophysical properties using sparse Gaussian Process kernels while taking into account the cross-variances of different parameters. Multiple optimisation strategies are tested and evaluated on a set of synthetic and real geophysical data. We demonstrate the advantages on a specific example of a joint inverse problem, recommending where to place new drill-core measurements given 2D gravity and magnetic sensor data, the same approach can be applied to a variety of remote sensing problems with linear forward models - ranging from constraints limiting surface access for data acquisition to adaptive multi-sensor positioning.
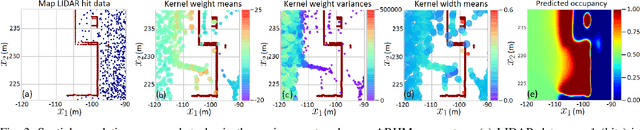
Sparse Spectrum Warped Input Measures for Nonstationary Kernel Learning
Oct 09, 2020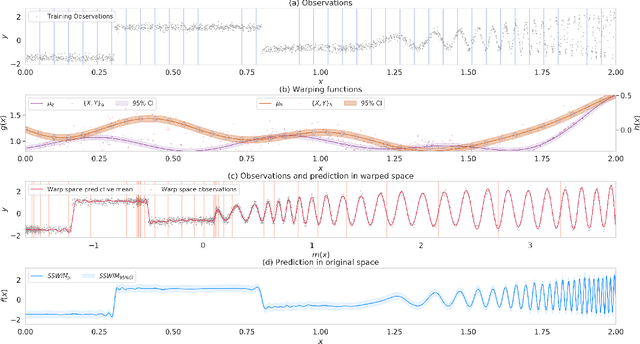
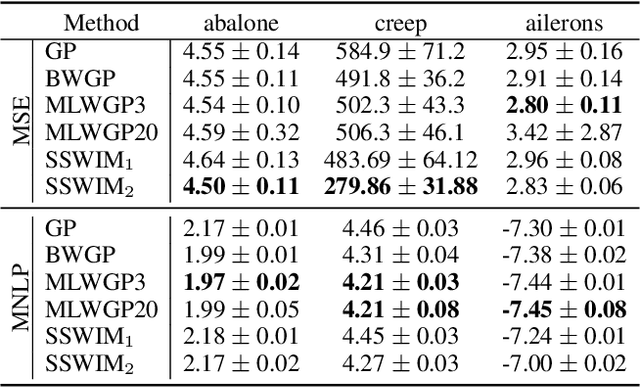
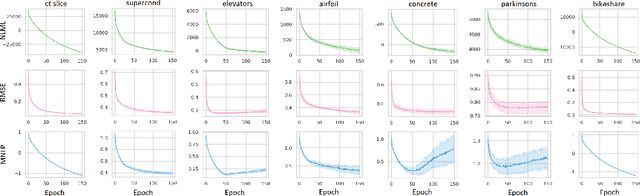
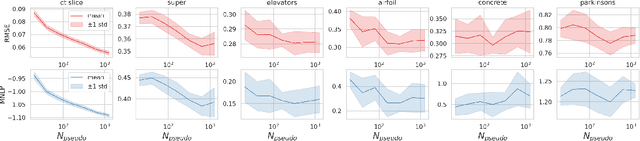
We establish a general form of explicit, input-dependent, measure-valued warpings for learning nonstationary kernels. While stationary kernels are ubiquitous and simple to use, they struggle to adapt to functions that vary in smoothness with respect to the input. The proposed learning algorithm warps inputs as conditional Gaussian measures that control the smoothness of a standard stationary kernel. This construction allows us to capture non-stationary patterns in the data and provides intuitive inductive bias. The resulting method is based on sparse spectrum Gaussian processes, enabling closed-form solutions, and is extensible to a stacked construction to capture more complex patterns. The method is extensively validated alongside related algorithms on synthetic and real world datasets. We demonstrate a remarkable efficiency in the number of parameters of the warping functions in learning problems with both small and large data regimes.
Heteroscedastic Bayesian Optimisation for Stochastic Model Predictive Control
Oct 08, 2020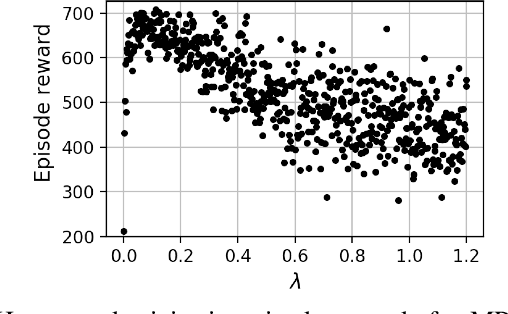
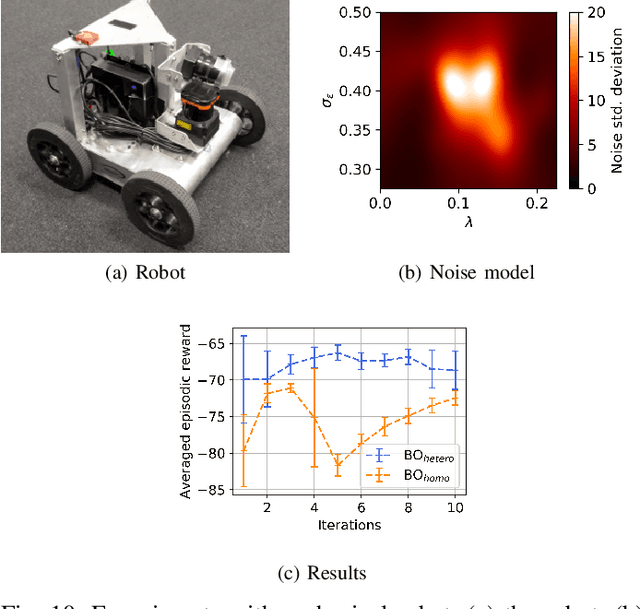
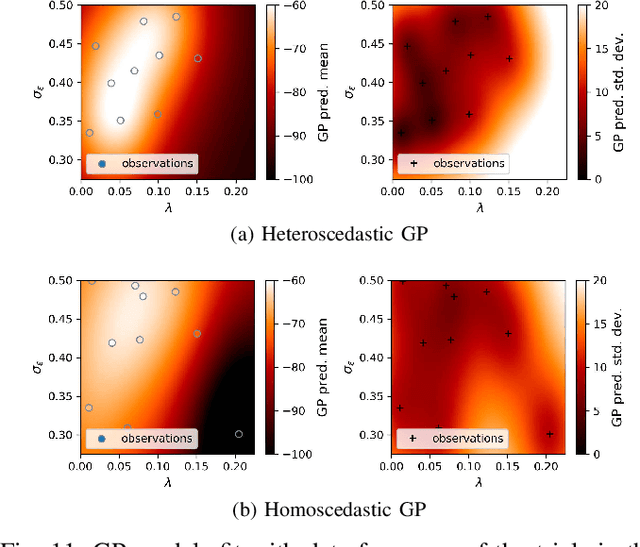
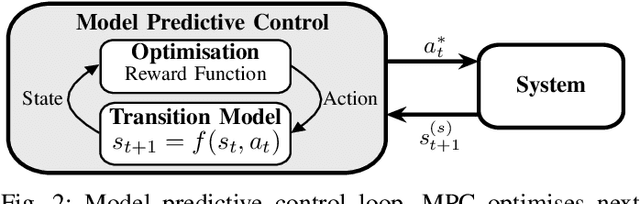
Model predictive control (MPC) has been successful in applications involving the control of complex physical systems. This class of controllers leverages the information provided by an approximate model of the system's dynamics to simulate the effect of control actions. MPC methods also present a few hyper-parameters which may require a relatively expensive tuning process by demanding interactions with the physical system. Therefore, we investigate fine-tuning MPC methods in the context of stochastic MPC, which presents extra challenges due to the randomness of the controller's actions. In these scenarios, performance outcomes present noise, which is not homogeneous across the domain of possible hyper-parameter settings, but which varies in an input-dependent way. To address these issues, we propose a Bayesian optimisation framework that accounts for heteroscedastic noise to tune hyper-parameters in control problems. Empirical results on benchmark continuous control tasks and a physical robot support the proposed framework's suitability relative to baselines, which do not take heteroscedasticity into account.
Online Domain Adaptation for Occupancy Mapping
Jul 01, 2020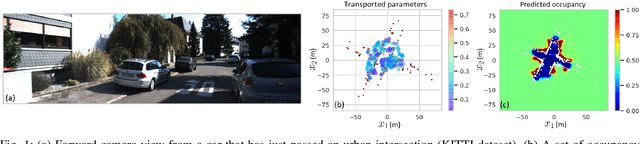
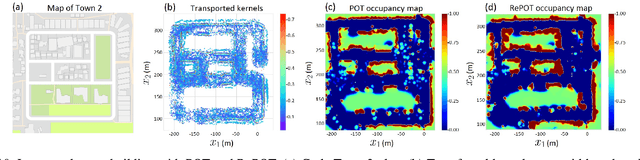
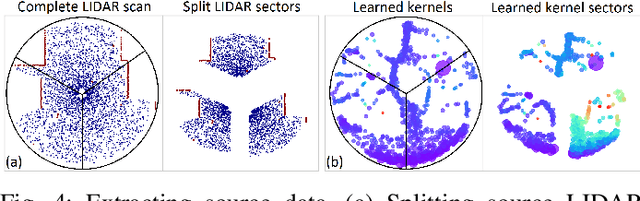
Creating accurate spatial representations that take into account uncertainty is critical for autonomous robots to safely navigate in unstructured environments. Although recent LIDAR based mapping techniques can produce robust occupancy maps, learning the parameters of such models demand considerable computational time, discouraging them from being used in real-time and large-scale applications such as autonomous driving. Recognizing the fact that real-world structures exhibit similar geometric features across a variety of urban environments, in this paper, we argue that it is redundant to learn all geometry dependent parameters from scratch. Instead, we propose a theoretical framework building upon the theory of optimal transport to adapt model parameters to account for changes in the environment, significantly amortizing the training cost. Further, with the use of high-fidelity driving simulators and real-world datasets, we demonstrate how parameters of 2D and 3D occupancy maps can be automatically adapted to accord with local spatial changes. We validate various domain adaptation paradigms through a series of experiments, ranging from inter-domain feature transfer to simulation-to-real-world feature transfer. Experiments verified the possibility of estimating parameters with a negligible computational and memory cost, enabling large-scale probabilistic mapping in urban environments.
Euclideanizing Flows: Diffeomorphic Reduction for Learning Stable Dynamical Systems
May 27, 2020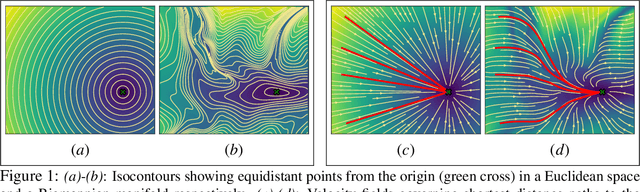
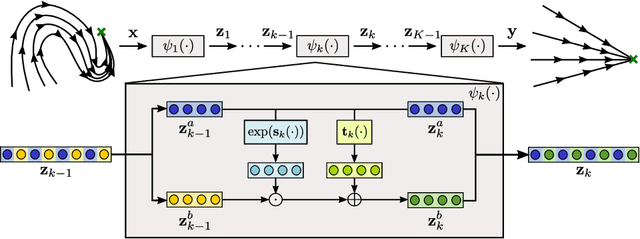
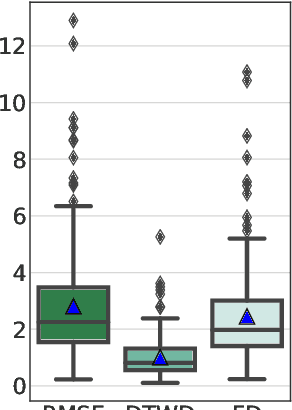
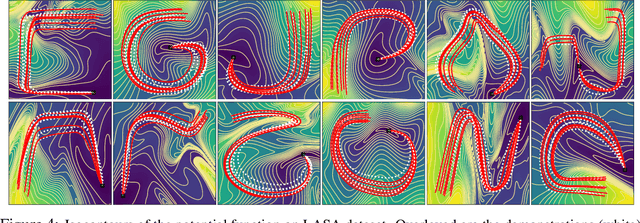
Robotic tasks often require motions with complex geometric structures. We present an approach to learn such motions from a limited number of human demonstrations by exploiting the regularity properties of human motions e.g. stability, smoothness, and boundedness. The complex motions are encoded as rollouts of a stable dynamical system, which, under a change of coordinates defined by a diffeomorphism, is equivalent to a simple, hand-specified dynamical system. As an immediate result of using diffeomorphisms, the stability property of the hand-specified dynamical system directly carry over to the learned dynamical system. Inspired by recent works in density estimation, we propose to represent the diffeomorphism as a composition of simple parameterized diffeomorphisms. Additional structure is imposed to provide guarantees on the smoothness of the generated motions. The efficacy of this approach is demonstrated through validation on an established benchmark as well demonstrations collected on a real-world robotic system.