 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDual-Arm Whole-Body Motion Planning: Leveraging Overlapping Kinematic Chains
Nov 11, 2025High degree-of-freedom dual-arm robots are becoming increasingly common due to their morphology enabling them to operate effectively in human environments. However, motion planning in real-time within unknown, changing environments remains a challenge for such robots due to the high dimensionality of the configuration space and the complex collision-avoidance constraints that must be obeyed. In this work, we propose a novel way to alleviate the curse of dimensionality by leveraging the structure imposed by shared joints (e.g. torso joints) in a dual-arm robot. First, we build two dynamic roadmaps (DRM) for each kinematic chain (i.e. left arm + torso, right arm + torso) with specific structure induced by the shared joints. Then, we show that we can leverage this structure to efficiently search through the composition of the two roadmaps and largely sidestep the curse of dimensionality. Finally, we run several experiments in a real-world grocery store with this motion planner on a 19 DoF mobile manipulation robot executing a grocery fulfillment task, achieving 0.4s average planning times with 99.9% success rate across more than 2000 motion plans.
Practical Insights on Grasp Strategies for Mobile Manipulation in the Wild
Apr 16, 2025Mobile manipulation robots are continuously advancing, with their grasping capabilities rapidly progressing. However, there are still significant gaps preventing state-of-the-art mobile manipulators from widespread real-world deployments, including their ability to reliably grasp items in unstructured environments. To help bridge this gap, we developed SHOPPER, a mobile manipulation robot platform designed to push the boundaries of reliable and generalizable grasp strategies. We develop these grasp strategies and deploy them in a real-world grocery store -- an exceptionally challenging setting chosen for its vast diversity of manipulable items, fixtures, and layouts. In this work, we present our detailed approach to designing general grasp strategies towards picking any item in a real grocery store. Additionally, we provide an in-depth analysis of our latest real-world field test, discussing key findings related to fundamental failure modes over hundreds of distinct pick attempts. Through our detailed analysis, we aim to offer valuable practical insights and identify key grasping challenges, which can guide the robotics community towards pressing open problems in the field.
Demonstrating Mobile Manipulation in the Wild: A Metrics-Driven Approach
Jan 03, 2024



We present our general-purpose mobile manipulation system consisting of a custom robot platform and key algorithms spanning perception and planning. To extensively test the system in the wild and benchmark its performance, we choose a grocery shopping scenario in an actual, unmodified grocery store. We derive key performance metrics from detailed robot log data collected during six week-long field tests, spread across 18 months. These objective metrics, gained from complex yet repeatable tests, drive the direction of our research efforts and let us continuously improve our system's performance. We find that thorough end-to-end system-level testing of a complex mobile manipulation system can serve as a reality-check for state-of-the-art methods in robotics. This effectively grounds robotics research efforts in real world needs and challenges, which we deem highly useful for the advancement of the field. To this end, we share our key insights and takeaways to inspire and accelerate similar system-level research projects.
Deformable Elasto-Plastic Object Shaping using an Elastic Hand and Model-Based Reinforcement Learning
Jul 14, 2021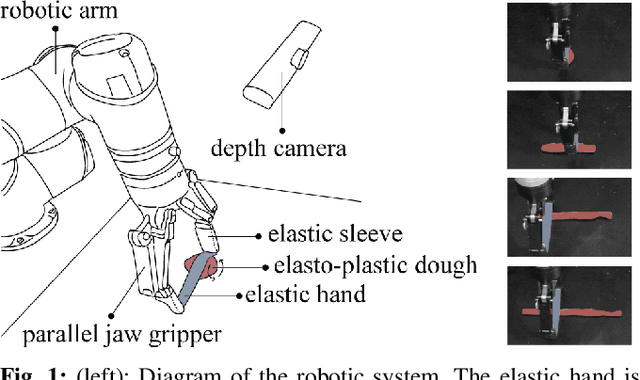
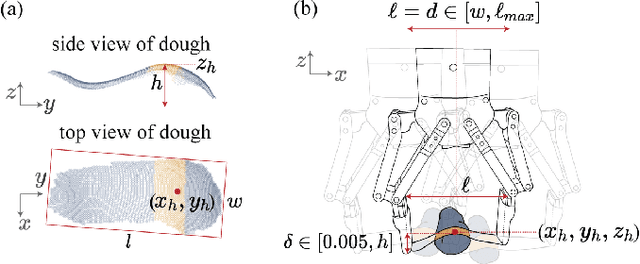
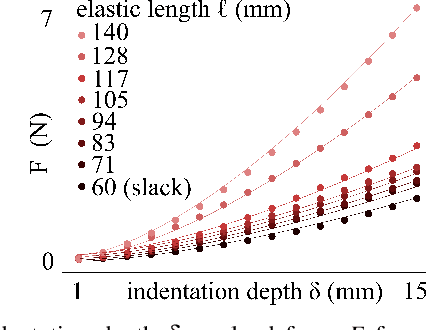

Deformable solid objects such as clay or dough are prevalent in industrial and home environments. However, robotic manipulation of such objects has largely remained unexplored in literature due to the high complexity involved in representing and modeling their deformation. This work addresses the problem of shaping elasto-plastic dough by proposing to use a novel elastic end-effector to roll dough in a reinforcement learning framework. The transition model for the end-effector-to-dough interactions is learned from one hour of robot exploration, and doughs of different hydration levels are rolled out into varying lengths. Experimental results are encouraging, with the proposed framework accomplishing the task of rolling out dough into a specified length with 60% fewer actions than a heuristic method. Furthermore, we show that estimating stiffness using the soft end-effector can be used to effectively initialize models, improving robot performance by approximately 40% over incorrect model initialization.
StRETcH: a Soft to Resistive Elastic Tactile Hand
May 17, 2021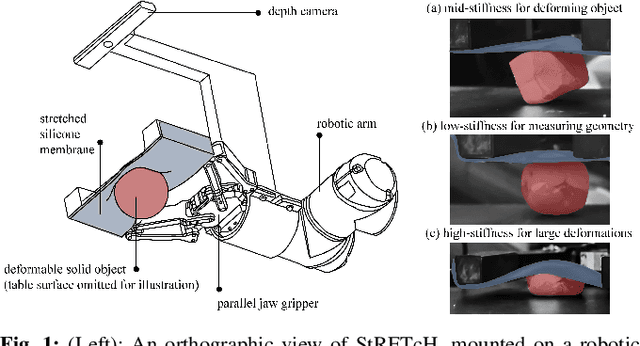
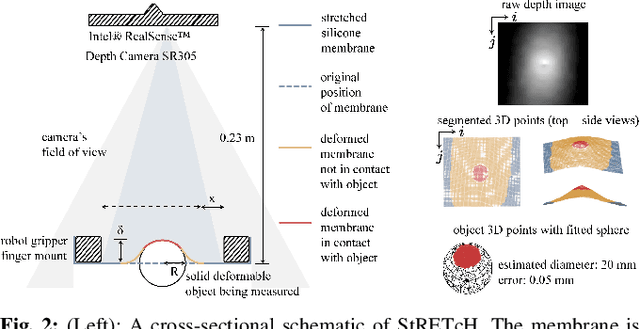
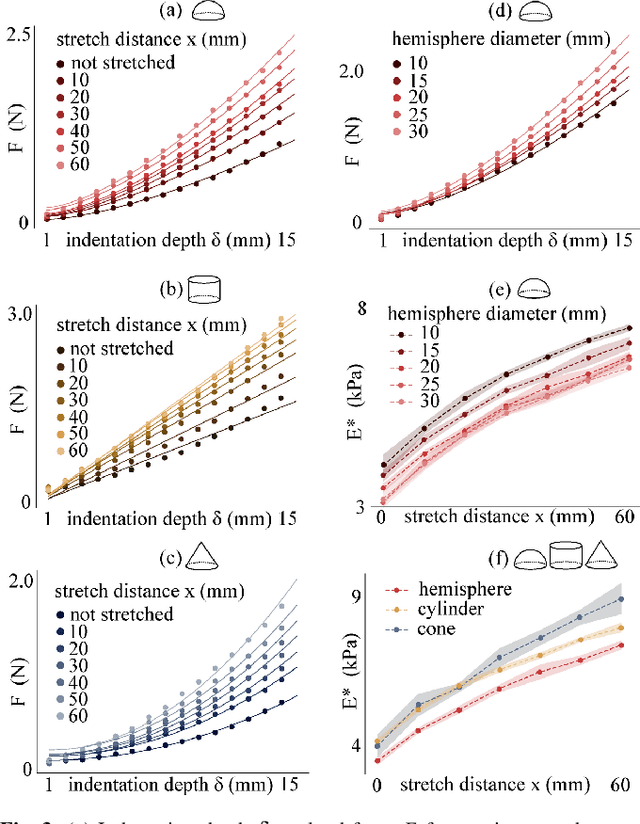
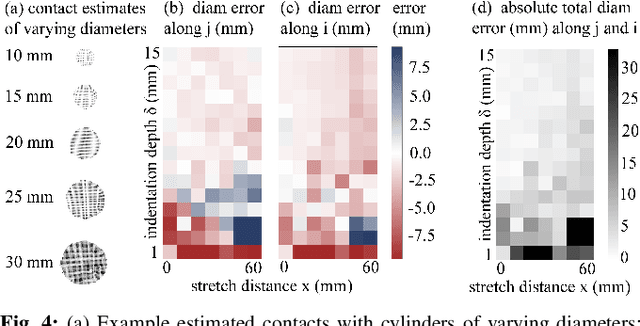
Soft optical tactile sensors enable robots to manipulate deformable objects by capturing important features such as high-resolution contact geometry and estimations of object compliance. This work presents a variable stiffness soft tactile end-effector called StRETcH, a Soft to Resistive Elastic Tactile Hand, that is easily manufactured and integrated with a robotic arm. An elastic membrane is suspended between two robotic fingers, and a depth sensor capturing the deformations of the elastic membrane enables sub-millimeter accurate estimates of contact geometries. The parallel-jaw gripper varies the stiffness of the membrane by uni-axially stretching it, which controllably modulates StRETcH's effective modulus from approximately 4kPa to 9kPa. This work uses StRETcH to reconstruct the contact geometry of rigid and deformable objects, estimate the stiffness of four balloons filled with different substances, and manipulate dough into a desired shape.
STReSSD: Sim-To-Real from Sound for Stochastic Dynamics
Nov 05, 2020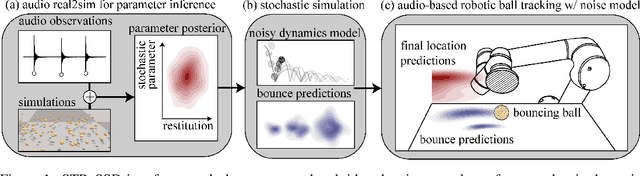
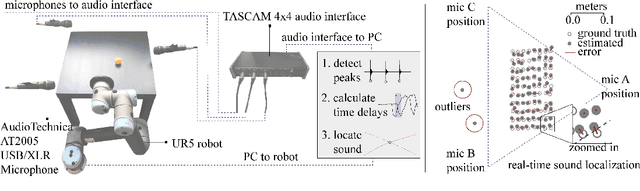
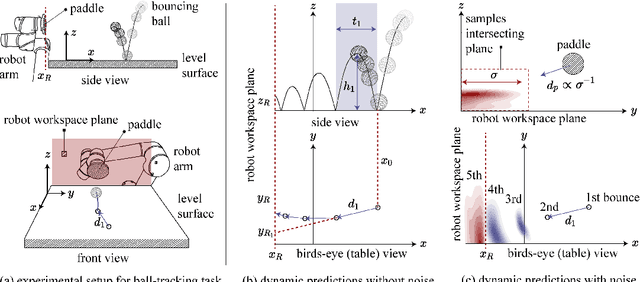
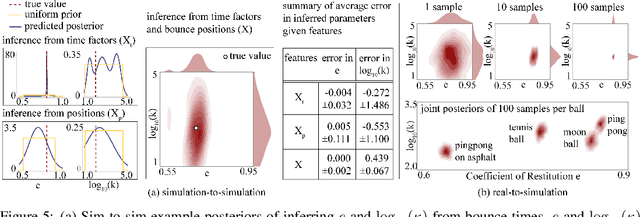
Sound is an information-rich medium that captures dynamic physical events. This work presents STReSSD, a framework that uses sound to bridge the simulation-to-reality gap for stochastic dynamics, demonstrated for the canonical case of a bouncing ball. A physically-motivated noise model is presented to capture stochastic behavior of the balls upon collision with the environment. A likelihood-free Bayesian inference framework is used to infer the parameters of the noise model, as well as a material property called the coefficient of restitution, from audio observations. The same inference framework and the calibrated stochastic simulator are then used to learn a probabilistic model of ball dynamics. The predictive capabilities of the dynamics model are tested in two robotic experiments. First, open-loop predictions anticipate probabilistic success of bouncing a ball into a cup. The second experiment integrates audio perception with a robotic arm to track and deflect a bouncing ball in real-time. We envision that this work is a step towards integrating audio-based inference for dynamic robotic tasks. Experimental results can be viewed at https://youtu.be/b7pOrgZrArk.
Inferring the Material Properties of Granular Media for Robotic Tasks
Mar 19, 2020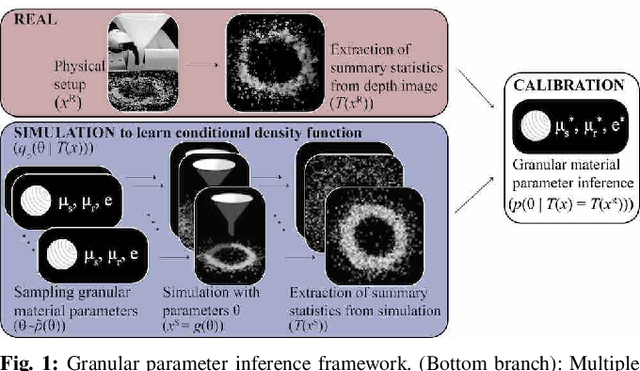
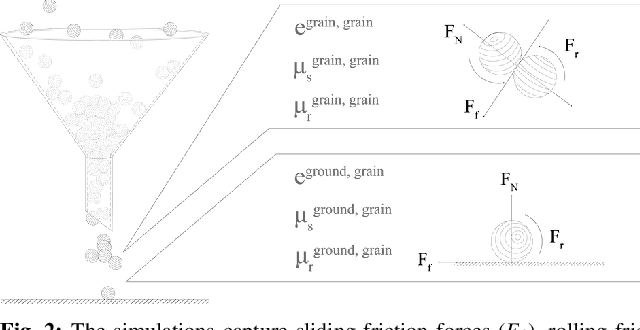
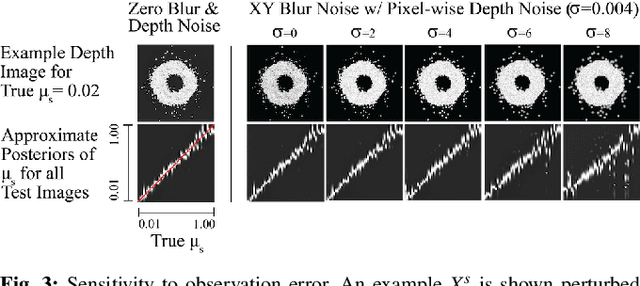
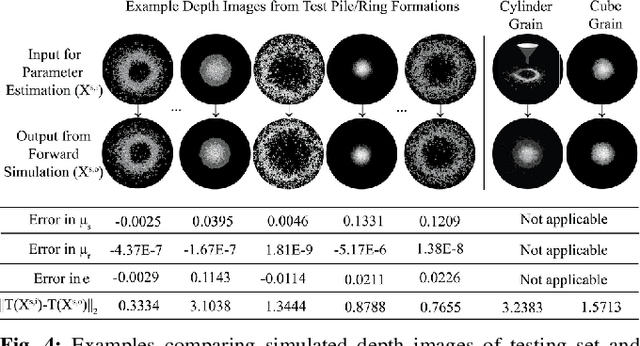
Granular media (e.g., cereal grains, plastic resin pellets, and pills) are ubiquitous in robotics-integrated industries, such as agriculture, manufacturing, and pharmaceutical development. This prevalence mandates the accurate and efficient simulation of these materials. This work presents a software and hardware framework that automatically calibrates a fast physics simulator to accurately simulate granular materials by inferring material properties from real-world depth images of granular formations (i.e., piles and rings). Specifically, coefficients of sliding friction, rolling friction, and restitution of grains are estimated from summary statistics of grain formations using likelihood-free Bayesian inference. The calibrated simulator accurately predicts unseen granular formations in both simulation and experiment; furthermore, simulator predictions are shown to generalize to more complex tasks, including using a robot to pour grains into a bowl, as well as to create a desired pattern of piles and rings. Visualizations of the framework and experiments can be viewed at https://www.youtube.com/watch?v=X-5Sk2TUET4.