 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScenePilot-Bench: A Large-Scale Dataset and Benchmark for Evaluation of Vision-Language Models in Autonomous Driving
Jan 27, 2026In this paper, we introduce ScenePilot-Bench, a large-scale first-person driving benchmark designed to evaluate vision-language models (VLMs) in autonomous driving scenarios. ScenePilot-Bench is built upon ScenePilot-4K, a diverse dataset comprising 3,847 hours of driving videos, annotated with multi-granularity information including scene descriptions, risk assessments, key participant identification, ego trajectories, and camera parameters. The benchmark features a four-axis evaluation suite that assesses VLM capabilities in scene understanding, spatial perception, motion planning, and GPT-Score, with safety-aware metrics and cross-region generalization settings. We benchmark representative VLMs on ScenePilot-Bench, providing empirical analyses that clarify current performance boundaries and identify gaps for driving-oriented reasoning. ScenePilot-Bench offers a comprehensive framework for evaluating and advancing VLMs in safety-critical autonomous driving contexts.
DriveRX: A Vision-Language Reasoning Model for Cross-Task Autonomous Driving
May 27, 2025Autonomous driving requires real-time, robust reasoning across perception, prediction, planning, and behavior. However, conventional end-to-end models fail to generalize in complex scenarios due to the lack of structured reasoning. Recent vision-language models (VLMs) have been applied to driving tasks, but they typically rely on isolated modules and static supervision, limiting their ability to support multi-stage decision-making. We present AutoDriveRL, a unified training framework that formulates autonomous driving as a structured reasoning process over four core tasks. Each task is independently modeled as a vision-language question-answering problem and optimized using task-specific reward models, enabling fine-grained reinforcement signals at different reasoning stages. Within this framework, we train DriveRX, a cross-task reasoning VLM designed for real-time decision-making. DriveRX achieves strong performance on a public benchmark, outperforming GPT-4o in behavior reasoning and demonstrating robustness under complex or corrupted driving conditions. Our analysis further highlights the impact of vision encoder design and reward-guided reasoning compression. We will release the AutoDriveRL framework and the DriveRX model to support future research.
Multi-scale Feature Fusion with Point Pyramid for 3D Object Detection
Sep 06, 2024



Effective point cloud processing is crucial to LiDARbased autonomous driving systems. The capability to understand features at multiple scales is required for object detection of intelligent vehicles, where road users may appear in different sizes. Recent methods focus on the design of the feature aggregation operators, which collect features at different scales from the encoder backbone and assign them to the points of interest. While efforts are made into the aggregation modules, the importance of how to fuse these multi-scale features has been overlooked. This leads to insufficient feature communication across scales. To address this issue, this paper proposes the Point Pyramid RCNN (POP-RCNN), a feature pyramid-based framework for 3D object detection on point clouds. POP-RCNN consists of a Point Pyramid Feature Enhancement (PPFE) module to establish connections across spatial scales and semantic depths for information exchange. The PPFE module effectively fuses multi-scale features for rich information without the increased complexity in feature aggregation. To remedy the impact of inconsistent point densities, a point density confidence module is deployed. This design integration enables the use of a lightweight feature aggregator, and the emphasis on both shallow and deep semantics, realising a detection framework for 3D object detection. With great adaptability, the proposed method can be applied to a variety of existing frameworks to increase feature richness, especially for long-distance detection. By adopting the PPFE in the voxel-based and point-voxel-based baselines, experimental results on KITTI and Waymo Open Dataset show that the proposed method achieves remarkable performance even with limited computational headroom.
Milestones in Autonomous Driving and Intelligent Vehicles Part \uppercase\expandafter{\romannumeral1}: Control, Computing System Design, Communication, HD Map, Testing, and Human Behaviors
May 12, 2023



Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks and lack systematic summaries and research directions in the future. Our work is divided into 3 independent articles and the first part is a Survey of Surveys (SoS) for total technologies of AD and IVs that involves the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. This is the second part (Part \uppercase\expandafter{\romannumeral1} for this technical survey) to review the development of control, computing system design, communication, High Definition map (HD map), testing, and human behaviors in IVs. In addition, the third part (Part \uppercase\expandafter{\romannumeral2} for this technical survey) is to review the perception and planning sections. The objective of this paper is to involve all the sections of AD, summarize the latest technical milestones, and guide abecedarians to quickly understand the development of AD and IVs. Combining the SoS and Part \uppercase\expandafter{\romannumeral2}, we anticipate that this work will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 18 pages, 4 figures, 3 tables
Milestones in Autonomous Driving and Intelligent Vehicles: Survey of Surveys
Mar 30, 2023



Interest in autonomous driving (AD) and intelligent vehicles (IVs) is growing at a rapid pace due to the convenience, safety, and economic benefits. Although a number of surveys have reviewed research achievements in this field, they are still limited in specific tasks, lack of systematic summary and research directions in the future. Here we propose a Survey of Surveys (SoS) for total technologies of AD and IVs that reviews the history, summarizes the milestones, and provides the perspectives, ethics, and future research directions. To our knowledge, this article is the first SoS with milestones in AD and IVs, which constitutes our complete research work together with two other technical surveys. We anticipate that this article will bring novel and diverse insights to researchers and abecedarians, and serve as a bridge between past and future.
* 13 pages, 3 tables, 0 figure
Deep Learning for Image and Point Cloud Fusion in Autonomous Driving: A Review
Apr 10, 2020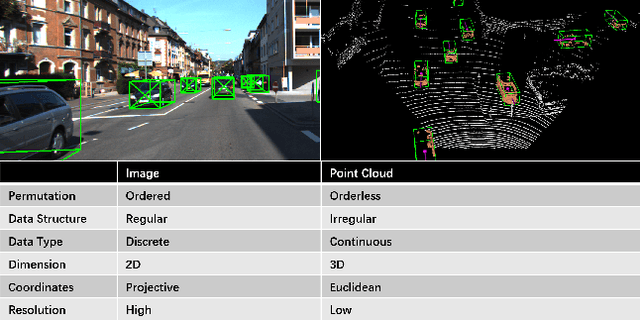
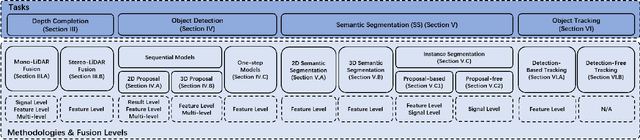
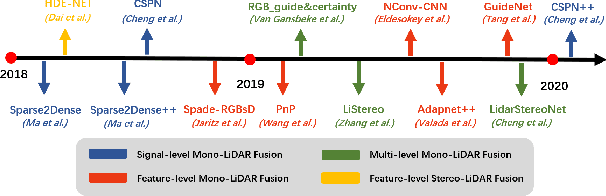
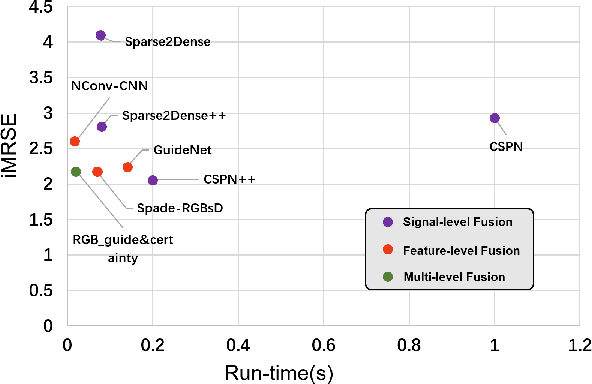
Autonomous vehicles are experiencing rapid development in the past few years. However, achieving full autonomy is not a trivial task, due to the nature of the complex and dynamic driving environment. Therefore, autonomous vehicles are equipped with a suite of different sensors to ensure robust, accurate environmental perception. In particular, camera-LiDAR fusion is becoming an emerging research theme. However, so far there is no critical review that focuses on deep-learning-based camera-LiDAR fusion methods. To bridge this gap and motivate future research, this paper devotes to review recent deep-learning-based data fusion approaches that leverage both image and point cloud. This review gives a brief overview of deep learning on image and point cloud data processing. Followed by in-depth reviews of camera-LiDAR fusion methods in depth completion, object detection, semantic segmentation and tracking, which are organized based on their respective fusion levels. Furthermore, we compare these methods on publicly available datasets. Finally, we identified gaps and over-looked challenges between current academic researches and real-world applications. Based on these observations, we provide our insights and point out promising research directions.