 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdversarial Preference Learning for Robust LLM Alignment
May 30, 2025



Modern language models often rely on Reinforcement Learning from Human Feedback (RLHF) to encourage safe behaviors. However, they remain vulnerable to adversarial attacks due to three key limitations: (1) the inefficiency and high cost of human annotation, (2) the vast diversity of potential adversarial attacks, and (3) the risk of feedback bias and reward hacking. To address these challenges, we introduce Adversarial Preference Learning (APL), an iterative adversarial training method incorporating three key innovations. First, a direct harmfulness metric based on the model's intrinsic preference probabilities, eliminating reliance on external assessment. Second, a conditional generative attacker that synthesizes input-specific adversarial variations. Third, an iterative framework with automated closed-loop feedback, enabling continuous adaptation through vulnerability discovery and mitigation. Experiments on Mistral-7B-Instruct-v0.3 demonstrate that APL significantly enhances robustness, achieving 83.33% harmlessness win rate over the base model (evaluated by GPT-4o), reducing harmful outputs from 5.88% to 0.43% (measured by LLaMA-Guard), and lowering attack success rate by up to 65% according to HarmBench. Notably, APL maintains competitive utility, with an MT-Bench score of 6.59 (comparable to the baseline 6.78) and an LC-WinRate of 46.52% against the base model.
MemOS: An Operating System for Memory-Augmented Generation (MAG) in Large Language Models
May 28, 2025



Large Language Models (LLMs) have emerged as foundational infrastructure in the pursuit of Artificial General Intelligence (AGI). Despite their remarkable capabilities in language perception and generation, current LLMs fundamentally lack a unified and structured architecture for handling memory. They primarily rely on parametric memory (knowledge encoded in model weights) and ephemeral activation memory (context-limited runtime states). While emerging methods like Retrieval-Augmented Generation (RAG) incorporate plaintext memory, they lack lifecycle management and multi-modal integration, limiting their capacity for long-term knowledge evolution. To address this, we introduce MemOS, a memory operating system designed for LLMs that, for the first time, elevates memory to a first-class operational resource. It builds unified mechanisms for representation, organization, and governance across three core memory types: parametric, activation, and plaintext. At its core is the MemCube, a standardized memory abstraction that enables tracking, fusion, and migration of heterogeneous memory, while offering structured, traceable access across tasks and contexts. MemOS establishes a memory-centric execution framework with strong controllability, adaptability, and evolvability. It fills a critical gap in current LLM infrastructure and lays the groundwork for continual adaptation, personalized intelligence, and cross-platform coordination in next-generation intelligent systems.
Xinyu AI Search: Enhanced Relevance and Comprehensive Results with Rich Answer Presentations
May 28, 2025Traditional search engines struggle to synthesize fragmented information for complex queries, while generative AI search engines face challenges in relevance, comprehensiveness, and presentation. To address these limitations, we introduce Xinyu AI Search, a novel system that incorporates a query-decomposition graph to dynamically break down complex queries into sub-queries, enabling stepwise retrieval and generation. Our retrieval pipeline enhances diversity through multi-source aggregation and query expansion, while filtering and re-ranking strategies optimize passage relevance. Additionally, Xinyu AI Search introduces a novel approach for fine-grained, precise built-in citation and innovates in result presentation by integrating timeline visualization and textual-visual choreography. Evaluated on recent real-world queries, Xinyu AI Search outperforms eight existing technologies in human assessments, excelling in relevance, comprehensiveness, and insightfulness. Ablation studies validate the necessity of its key sub-modules. Our work presents the first comprehensive framework for generative AI search engines, bridging retrieval, generation, and user-centric presentation.
Xinyu: An Efficient LLM-based System for Commentary Generation
Aug 21, 2024



Commentary provides readers with a deep understanding of events by presenting diverse arguments and evidence. However, creating commentary is a time-consuming task, even for skilled commentators. Large language models (LLMs) have simplified the process of natural language generation, but their direct application in commentary creation still faces challenges due to unique task requirements. These requirements can be categorized into two levels: 1) fundamental requirements, which include creating well-structured and logically consistent narratives, and 2) advanced requirements, which involve generating quality arguments and providing convincing evidence. In this paper, we introduce Xinyu, an efficient LLM-based system designed to assist commentators in generating Chinese commentaries. To meet the fundamental requirements, we deconstruct the generation process into sequential steps, proposing targeted strategies and supervised fine-tuning (SFT) for each step. To address the advanced requirements, we present an argument ranking model for arguments and establish a comprehensive evidence database that includes up-to-date events and classic books, thereby strengthening the substantiation of the evidence with retrieval augmented generation (RAG) technology. To evaluate the generated commentaries more fairly, corresponding to the two-level requirements, we introduce a comprehensive evaluation metric that considers five distinct perspectives in commentary generation. Our experiments confirm the effectiveness of our proposed system. We also observe a significant increase in the efficiency of commentators in real-world scenarios, with the average time spent on creating a commentary dropping from 4 hours to 20 minutes. Importantly, such an increase in efficiency does not compromise the quality of the commentaries.
$\text{Memory}^3$: Language Modeling with Explicit Memory
Jul 01, 2024



The training and inference of large language models (LLMs) are together a costly process that transports knowledge from raw data to meaningful computation. Inspired by the memory hierarchy of the human brain, we reduce this cost by equipping LLMs with explicit memory, a memory format cheaper than model parameters and text retrieval-augmented generation (RAG). Conceptually, with most of its knowledge externalized to explicit memories, the LLM can enjoy a smaller parameter size, training cost, and inference cost, all proportional to the amount of remaining "abstract knowledge". As a preliminary proof of concept, we train from scratch a 2.4B LLM, which achieves better performance than much larger LLMs as well as RAG models, and maintains higher decoding speed than RAG. The model is named $\text{Memory}^3$, since explicit memory is the third form of memory in LLMs after implicit memory (model parameters) and working memory (context key-values). We introduce a memory circuitry theory to support the externalization of knowledge, and present novel techniques including a memory sparsification mechanism that makes storage tractable and a two-stage pretraining scheme that facilitates memory formation.
Empowering Large Language Models to Set up a Knowledge Retrieval Indexer via Self-Learning
May 27, 2024



Retrieval-Augmented Generation (RAG) offers a cost-effective approach to injecting real-time knowledge into large language models (LLMs). Nevertheless, constructing and validating high-quality knowledge repositories require considerable effort. We propose a pre-retrieval framework named Pseudo-Graph Retrieval-Augmented Generation (PG-RAG), which conceptualizes LLMs as students by providing them with abundant raw reading materials and encouraging them to engage in autonomous reading to record factual information in their own words. The resulting concise, well-organized mental indices are interconnected through common topics or complementary facts to form a pseudo-graph database. During the retrieval phase, PG-RAG mimics the human behavior in flipping through notes, identifying fact paths and subsequently exploring the related contexts. Adhering to the principle of the path taken by many is the best, it integrates highly corroborated fact paths to provide a structured and refined sub-graph assisting LLMs. We validated PG-RAG on three specialized question-answering datasets. In single-document tasks, PG-RAG significantly outperformed the current best baseline, KGP-LLaMA, across all key evaluation metrics, with an average overall performance improvement of 11.6%. Specifically, its BLEU score increased by approximately 14.3%, and the QE-F1 metric improved by 23.7%. In multi-document scenarios, the average metrics of PG-RAG were at least 2.35% higher than the best baseline. Notably, the BLEU score and QE-F1 metric showed stable improvements of around 7.55% and 12.75%, respectively. Our code: https://github.com/IAAR-Shanghai/PGRAG.
Interpretable performance analysis towards offline reinforcement learning: A dataset perspective
May 12, 2021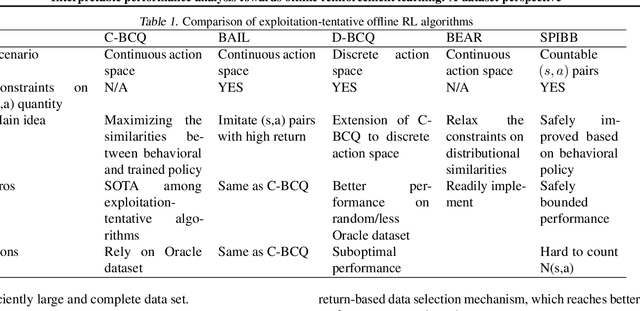
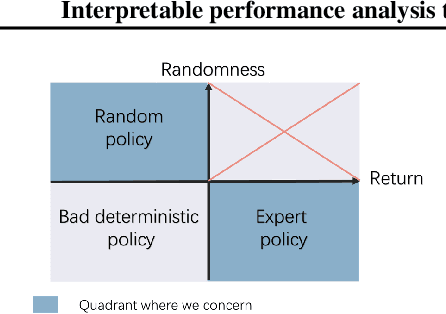
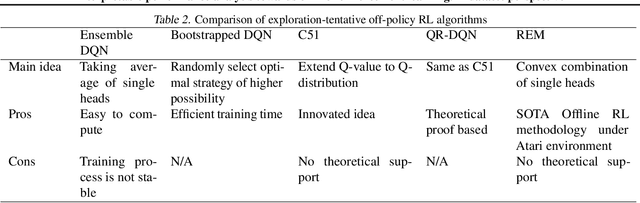
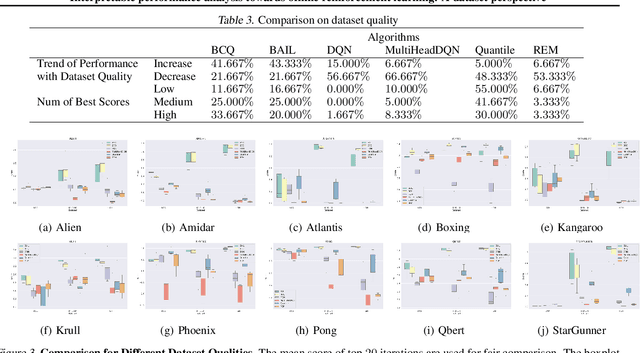
Offline reinforcement learning (RL) has increasingly become the focus of the artificial intelligent research due to its wide real-world applications where the collection of data may be difficult, time-consuming, or costly. In this paper, we first propose a two-fold taxonomy for existing offline RL algorithms from the perspective of exploration and exploitation tendency. Secondly, we derive the explicit expression of the upper bound of extrapolation error and explore the correlation between the performance of different types of algorithms and the distribution of actions under states. Specifically, we relax the strict assumption on the sufficiently large amount of state-action tuples. Accordingly, we provably explain why batch constrained Q-learning (BCQ) performs better than other existing techniques. Thirdly, after identifying the weakness of BCQ on dataset of low mean episode returns, we propose a modified variant based on top return selection mechanism, which is proved to be able to gain state-of-the-art performance on various datasets. Lastly, we create a benchmark platform on the Atari domain, entitled RL easy go (RLEG), at an estimated cost of more than 0.3 million dollars. We make it open-source for fair and comprehensive competitions between offline RL algorithms with complete datasets and checkpoints being provided.
A Data Driven Approach for Motion Planning of Autonomous Driving Under Complex Scenario
Apr 18, 2019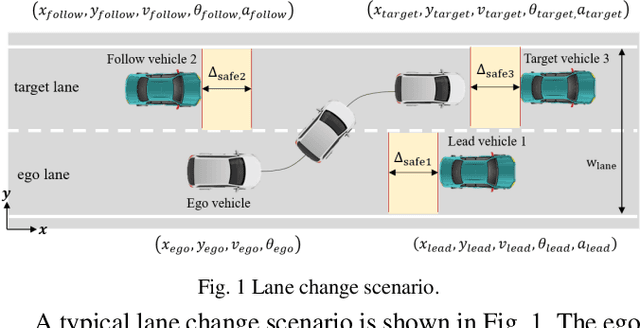
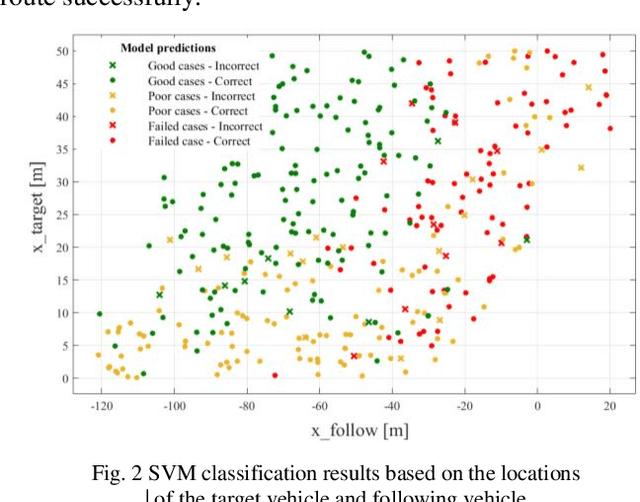
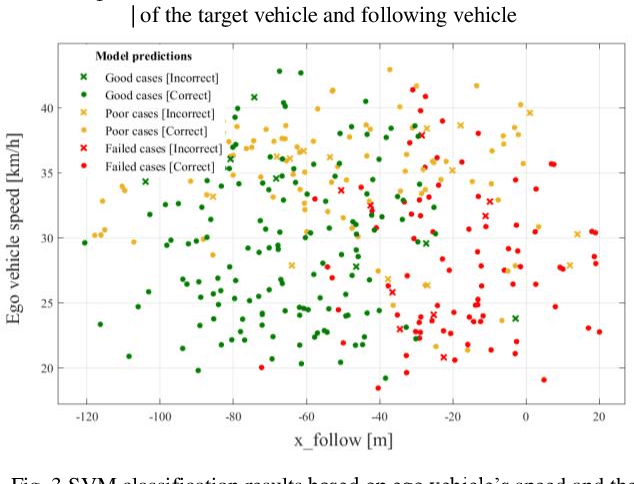
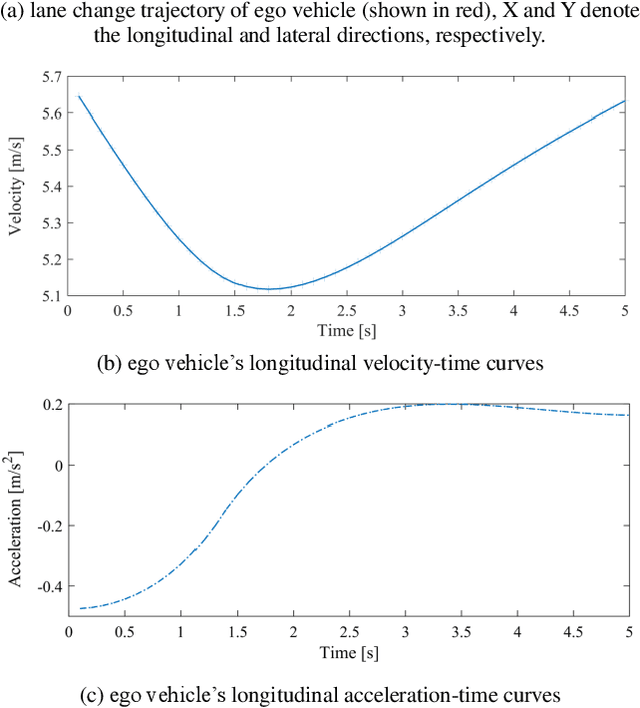
To guarantee the safe and efficient motion planning of autonomous driving under dynamic traffic environment, the autonomous vehicle should be equipped with not only the optimal but also a long term efficient policy to deal with complex scenarios. The first challenge is that to acquire the optimal planning trajectory means to sacrifice the planning efficiency. The second challenge is that most search based planning method cannot find the desired trajectory in extreme scenario. In this paper, we propose a data driven approach for motion planning to solve the above challenges. We transform the lane change mission into Mixed Integer Quadratic Problem with logical constraints, allowing the planning module to provide feasible, safe and comfortable actions in more complex scenario. Furthermore, we propose a hierarchical learning structure to guarantee online, fast and more generalized motion planning. Our approach's performance is demonstrated in the simulated lane change scenario and compared with related planning method.