 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCompressed domain vibration detection and classification for distributed acoustic sensing
Dec 27, 2022



Distributed acoustic sensing (DAS) is a novel enabling technology that can turn existing fibre optic networks to distributed acoustic sensors. However, it faces the challenges of transmitting, storing, and processing massive streams of data which are orders of magnitude larger than that collected from point sensors. The gap between intensive data generated by DAS and modern computing system with limited reading/writing speed and storage capacity imposes restrictions on many applications. Compressive sensing (CS) is a revolutionary signal acquisition method that allows a signal to be acquired and reconstructed with significantly fewer samples than that required by Nyquist-Shannon theorem. Though the data size is greatly reduced in the sampling stage, the reconstruction of the compressed data is however time and computation consuming. To address this challenge, we propose to map the feature extractor from Nyquist-domain to compressed-domain and therefore vibration detection and classification can be directly implemented in compressed-domain. The measured results show that our framework can be used to reduce the transmitted data size by 70% while achieves 99.4% true positive rate (TPR) and 0.04% false positive rate (TPR) along 5 km sensing fibre and 95.05% classification accuracy on a 5-class classification task.
Continual Interactive Behavior Learning With Traffic Divergence Measurement: A Dynamic Gradient Scenario Memory Approach
Dec 21, 2022



Developing autonomous vehicles (AVs) helps improve the road safety and traffic efficiency of intelligent transportation systems (ITS). Accurately predicting the trajectories of traffic participants is essential to the decision-making and motion planning of AVs in interactive scenarios. Recently, learning-based trajectory predictors have shown state-of-the-art performance in highway or urban areas. However, most existing learning-based models trained with fixed datasets may perform poorly in continuously changing scenarios. Specifically, they may not perform well in learned scenarios after learning the new one. This phenomenon is called "catastrophic forgetting". Few studies investigate trajectory predictions in continuous scenarios, where catastrophic forgetting may happen. To handle this problem, first, a novel continual learning (CL) approach for vehicle trajectory prediction is proposed in this paper. Then, inspired by brain science, a dynamic memory mechanism is developed by utilizing the measurement of traffic divergence between scenarios, which balances the performance and training efficiency of the proposed CL approach. Finally, datasets collected from different locations are used to design continual training and testing methods in experiments. Experimental results show that the proposed approach achieves consistently high prediction accuracy in continuous scenarios without re-training, which mitigates catastrophic forgetting compared to non-CL approaches. The implementation of the proposed approach is publicly available at https://github.com/BIT-Jack/D-GSM
Leveraging Multi-stream Information Fusion for Trajectory Prediction in Low-illumination Scenarios: A Multi-channel Graph Convolutional Approach
Nov 18, 2022



Trajectory prediction is a fundamental problem and challenge for autonomous vehicles. Early works mainly focused on designing complicated architectures for deep-learning-based prediction models in normal-illumination environments, which fail in dealing with low-light conditions. This paper proposes a novel approach for trajectory prediction in low-illumination scenarios by leveraging multi-stream information fusion, which flexibly integrates image, optical flow, and object trajectory information. The image channel employs Convolutional Neural Network (CNN) and Long Short-term Memory (LSTM) networks to extract temporal information from the camera. The optical flow channel is applied to capture the pattern of relative motion between adjacent camera frames and modelled by Spatial-Temporal Graph Convolutional Network (ST-GCN). The trajectory channel is used to recognize high-level interactions between vehicles. Finally, information from all the three channels is effectively fused in the prediction module to generate future trajectories of surrounding vehicles in low-illumination conditions. The proposed multi-channel graph convolutional approach is validated on HEV-I and newly generated Dark-HEV-I, egocentric vision datasets that primarily focus on urban intersection scenarios. The results demonstrate that our method outperforms the baselines, in standard and low-illumination scenarios. Additionally, our approach is generic and applicable to scenarios with different types of perception data. The source code of the proposed approach is available at https://github.com/TommyGong08/MSIF}{https://github.com/TommyGong08/MSIF.
Adaptive Decision Making at the Intersection for Autonomous Vehicles Based on Skill Discovery
Jul 24, 2022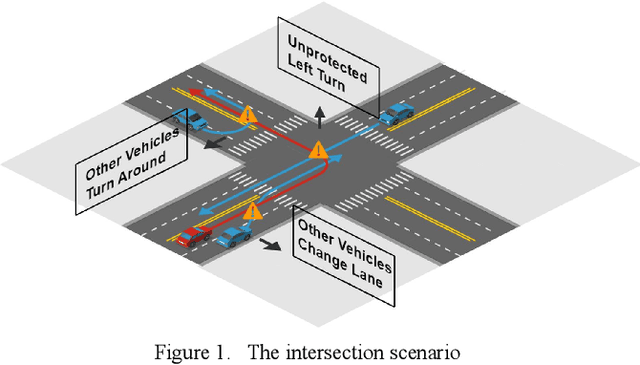
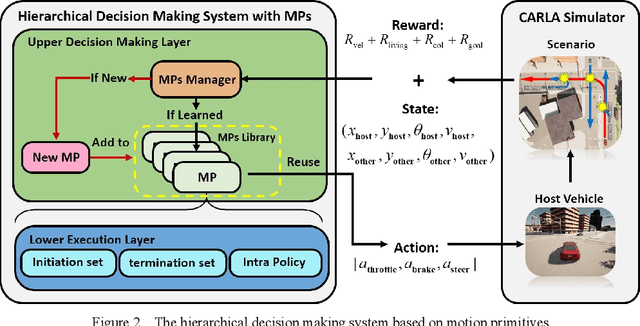
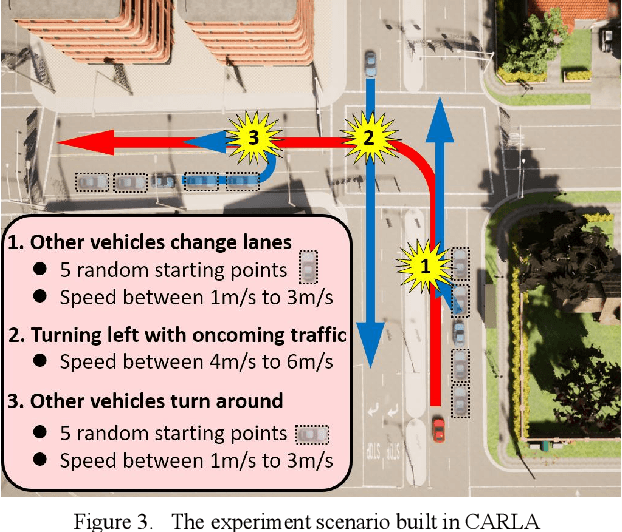
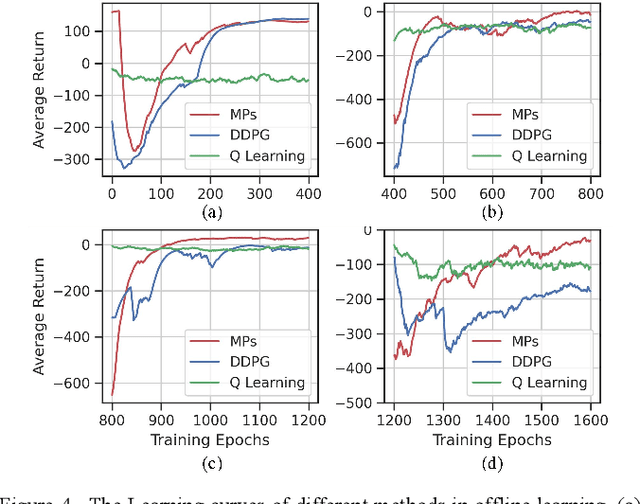
In urban environments, the complex and uncertain intersection scenarios are challenging for autonomous driving. To ensure safety, it is crucial to develop an adaptive decision making system that can handle the interaction with other vehicles. Manually designed model-based methods are reliable in common scenarios. But in uncertain environments, they are not reliable, so learning-based methods are proposed, especially reinforcement learning (RL) methods. However, current RL methods need retraining when the scenarios change. In other words, current RL methods cannot reuse accumulated knowledge. They forget learned knowledge when new scenarios are given. To solve this problem, we propose a hierarchical framework that can autonomously accumulate and reuse knowledge. The proposed method combines the idea of motion primitives (MPs) with hierarchical reinforcement learning (HRL). It decomposes complex problems into multiple basic subtasks to reduce the difficulty. The proposed method and other baseline methods are tested in a challenging intersection scenario based on the CARLA simulator. The intersection scenario contains three different subtasks that can reflect the complexity and uncertainty of real traffic flow. After offline learning and testing, the proposed method is proved to have the best performance among all methods.
An Ensemble Learning Framework for Vehicle Trajectory Prediction in Interactive Scenarios
Feb 22, 2022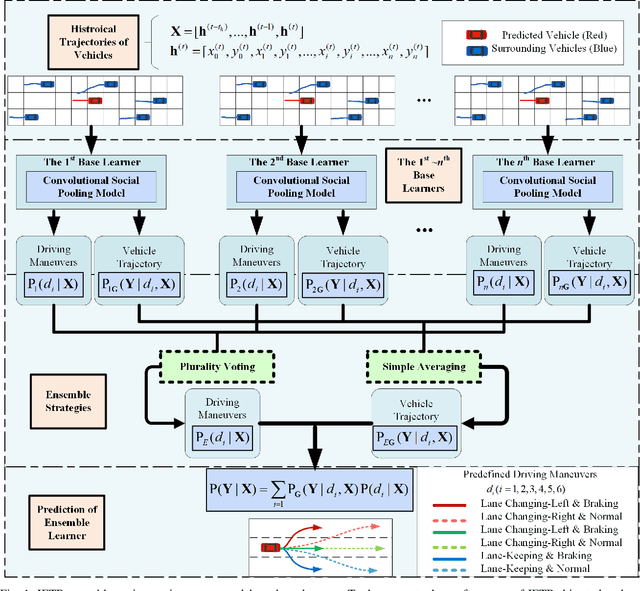
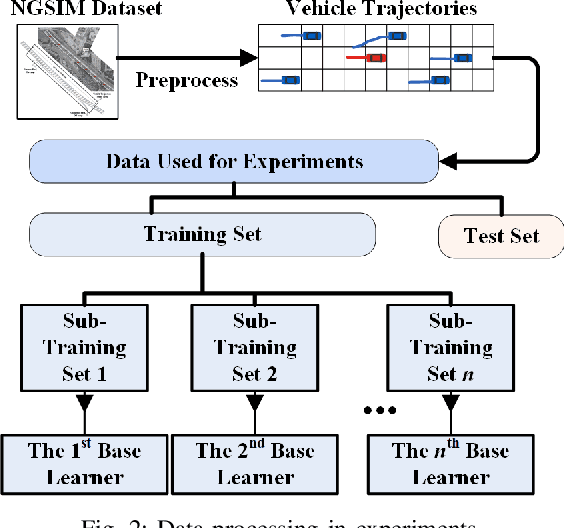
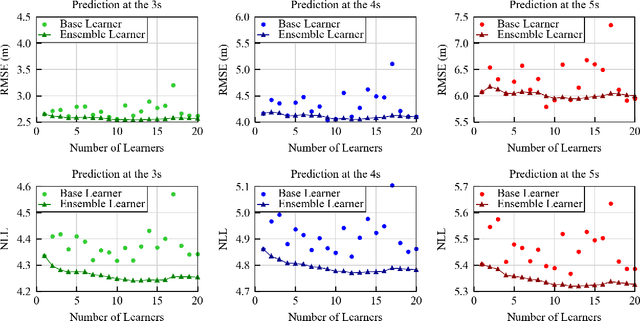
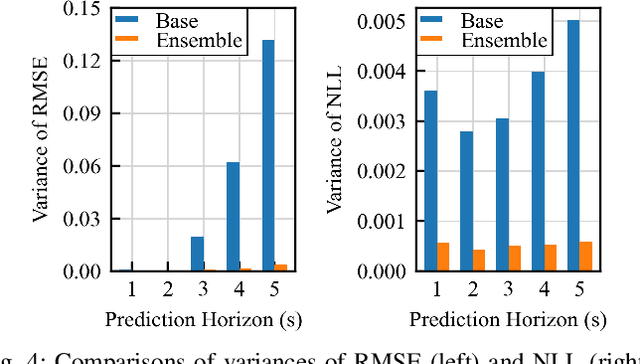
Precisely modeling interactions and accurately predicting trajectories of surrounding vehicles are essential to the decision-making and path-planning of intelligent vehicles. This paper proposes a novel framework based on ensemble learning to improve the performance of trajectory predictions in interactive scenarios. The framework is termed Interactive Ensemble Trajectory Predictor (IETP). IETP assembles interaction-aware trajectory predictors as base learners to build an ensemble learner. Firstly, each base learner in IETP observes historical trajectories of vehicles in the scene. Then each base learner handles interactions between vehicles to predict trajectories. Finally, an ensemble learner is built to predict trajectories by applying two ensemble strategies on the predictions from all base learners. Predictions generated by the ensemble learner are final outputs of IETP. In this study, three experiments using different data are conducted based on the NGSIM dataset. Experimental results show that IETP improves the predicting accuracy and decreases the variance of errors compared to base learners. In addition, IETP exceeds baseline models with 50% of the training data, indicating that IETP is data-efficient. Moreover, the implementation of IETP is publicly available at https://github.com/BIT-Jack/IETP.
Automatic Sparse Connectivity Learning for Neural Networks
Jan 13, 2022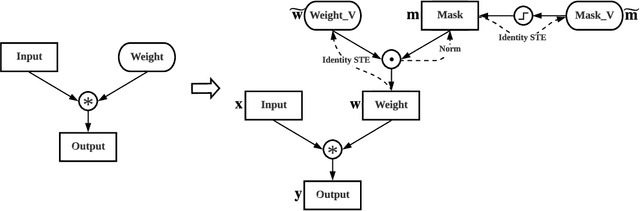
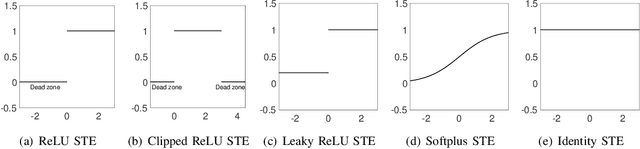
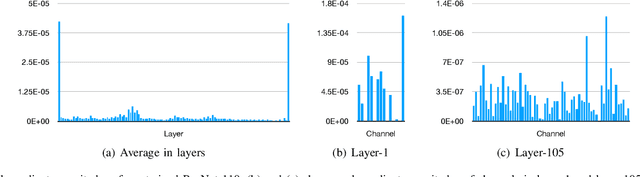
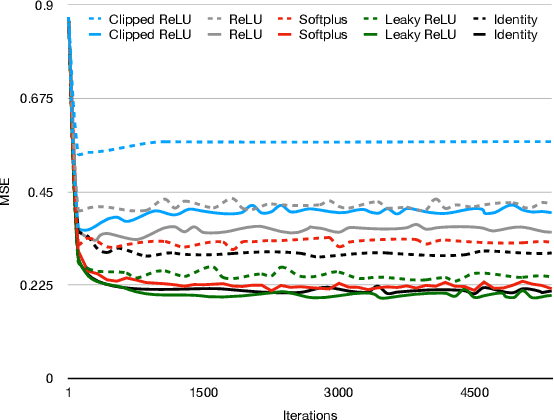
Since sparse neural networks usually contain many zero weights, these unnecessary network connections can potentially be eliminated without degrading network performance. Therefore, well-designed sparse neural networks have the potential to significantly reduce FLOPs and computational resources. In this work, we propose a new automatic pruning method - Sparse Connectivity Learning (SCL). Specifically, a weight is re-parameterized as an element-wise multiplication of a trainable weight variable and a binary mask. Thus, network connectivity is fully described by the binary mask, which is modulated by a unit step function. We theoretically prove the fundamental principle of using a straight-through estimator (STE) for network pruning. This principle is that the proxy gradients of STE should be positive, ensuring that mask variables converge at their minima. After finding Leaky ReLU, Softplus, and Identity STEs can satisfy this principle, we propose to adopt Identity STE in SCL for discrete mask relaxation. We find that mask gradients of different features are very unbalanced, hence, we propose to normalize mask gradients of each feature to optimize mask variable training. In order to automatically train sparse masks, we include the total number of network connections as a regularization term in our objective function. As SCL does not require pruning criteria or hyper-parameters defined by designers for network layers, the network is explored in a larger hypothesis space to achieve optimized sparse connectivity for the best performance. SCL overcomes the limitations of existing automatic pruning methods. Experimental results demonstrate that SCL can automatically learn and select important network connections for various baseline network structures. Deep learning models trained by SCL outperform the SOTA human-designed and automatic pruning methods in sparsity, accuracy, and FLOPs reduction.
Driver-Specific Risk Recognition in Interactive Driving Scenarios using Graph Representation
Nov 11, 2021



This paper presents a driver-specific risk recognition framework for autonomous vehicles that can extract inter-vehicle interactions. This extraction is carried out for urban driving scenarios in a driver-cognitive manner to improve the recognition accuracy of risky scenes. First, clustering analysis is applied to the operation data of drivers for learning the subjective assessment of risky scenes of different drivers and generating the corresponding risk label for each scene. Second, the graph representation model (GRM) is adopted to unify and construct the features of dynamic vehicles, inter-vehicle interactions and static traffic markings in real driving scenes into graphs. The driver-specific risk label provides ground truth to capture the risk evaluation criteria of different drivers. In addition, the graph model represents multiple features of the driving scenes. Therefore, the proposed framework can learn the risk-evaluating pattern of driving scenes of different drivers and establish driver-specific risk identifiers. Last, the performance of the proposed framework is evaluated via experiments conducted using real-world urban driving datasets collected by multiple drivers. The results show that the risks and their levels in real driving environments can be accurately recognized by the proposed framework.
Prediction of Pedestrian Spatiotemporal Risk Levels for Intelligent Vehicles: A Data-driven Approach
Nov 06, 2021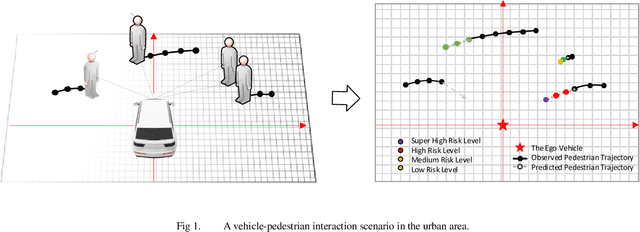
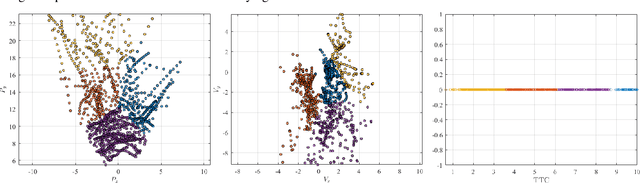
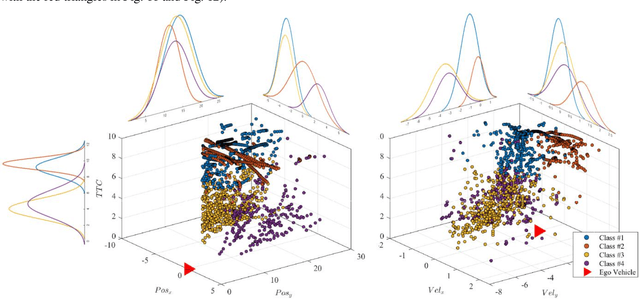
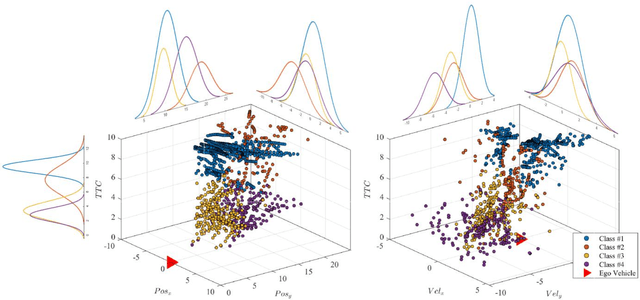
In recent years, road safety has attracted significant attention from researchers and practitioners in the intelligent transport systems domain. As one of the most common and vulnerable groups of road users, pedestrians cause great concerns due to their unpredictable behavior and movement, as subtle misunderstandings in vehicle-pedestrian interaction can easily lead to risky situations or collisions. Existing methods use either predefined collision-based models or human-labeling approaches to estimate the pedestrians' risks. These approaches are usually limited by their poor generalization ability and lack of consideration of interactions between the ego vehicle and a pedestrian. This work tackles the listed problems by proposing a Pedestrian Risk Level Prediction system. The system consists of three modules. Firstly, vehicle-perspective pedestrian data are collected. Since the data contains information regarding the movement of both the ego vehicle and pedestrian, it can simplify the prediction of spatiotemporal features in an interaction-aware fashion. Using the long short-term memory model, the pedestrian trajectory prediction module predicts their spatiotemporal features in the subsequent five frames. As the predicted trajectory follows certain interaction and risk patterns, a hybrid clustering and classification method is adopted to explore the risk patterns in the spatiotemporal features and train a risk level classifier using the learned patterns. Upon predicting the spatiotemporal features of pedestrians and identifying the corresponding risk level, the risk patterns between the ego vehicle and pedestrians are determined. Experimental results verified the capability of the PRLP system to predict the risk level of pedestrians, thus supporting the collision risk assessment of intelligent vehicles and providing safety warnings to both vehicles and pedestrians.
Life-Long Multi-Task Learning of Adaptive Path Tracking Policy for Autonomous Vehicle
Sep 15, 2021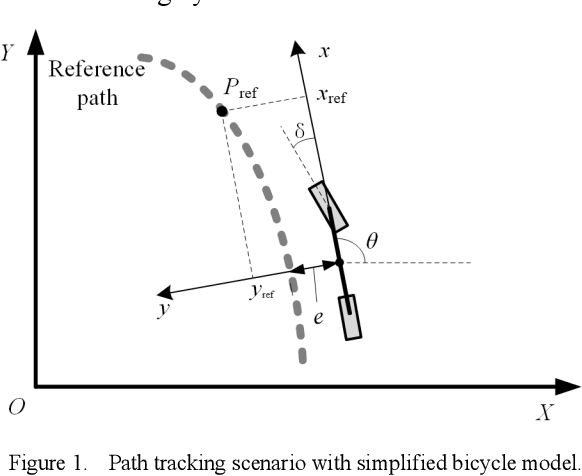
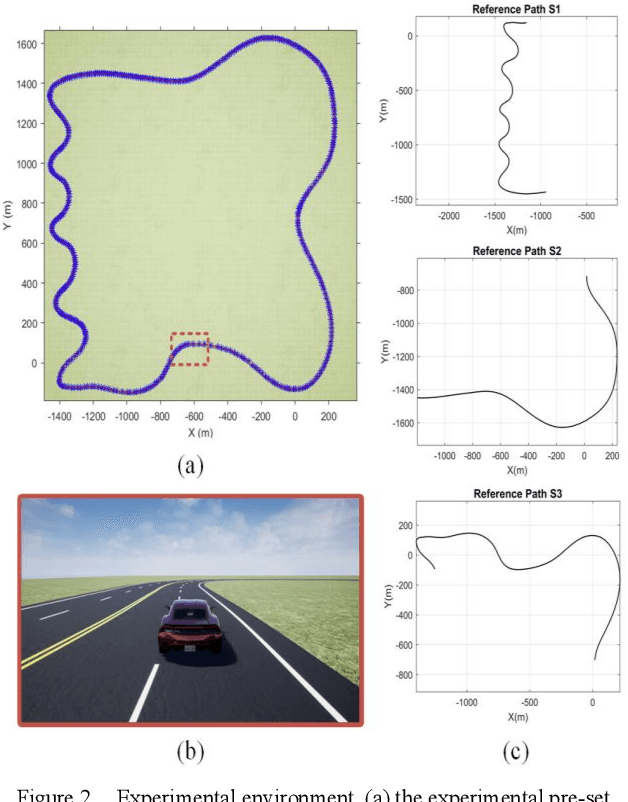
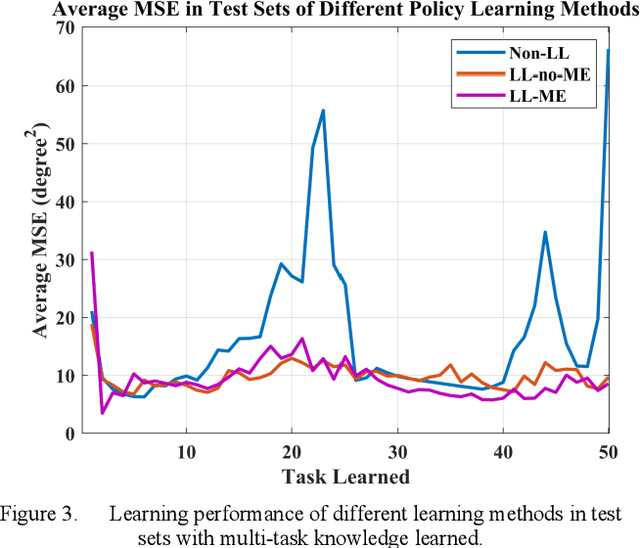
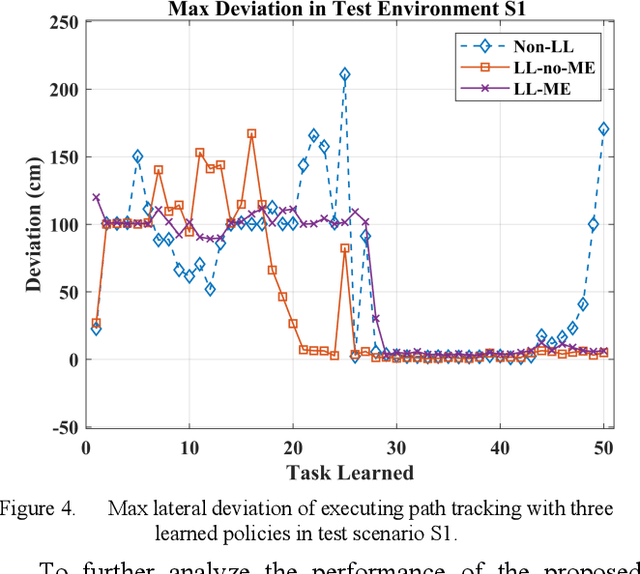
This paper proposes a life-long adaptive path tracking policy learning method for autonomous vehicles that can self-evolve and self-adapt with multi-task knowledge. Firstly, the proposed method can learn a model-free control policy for path tracking directly from the historical driving experience, where the property of vehicle dynamics and corresponding control strategy can be learned simultaneously. Secondly, by utilizing the life-long learning method, the proposed method can learn the policy with task-incremental knowledge without encountering catastrophic forgetting. Thus, with continual multi-task knowledge learned, the policy can iteratively adapt to new tasks and improve its performance with knowledge from new tasks. Thirdly, a memory evaluation and updating method is applied to optimize memory structure for life-long learning which enables the policy to learn toward selected directions. Experiments are conducted using a high-fidelity vehicle dynamic model in a complex curvy road to evaluate the performance of the proposed method. Results show that the proposed method can effectively evolve with continual multi-task knowledge and adapt to the new environment, where the performance of the proposed method can also surpass two commonly used baseline methods after evolving.
Physics-informed Neural Network for Nonlinear Dynamics in Fiber Optics
Sep 01, 2021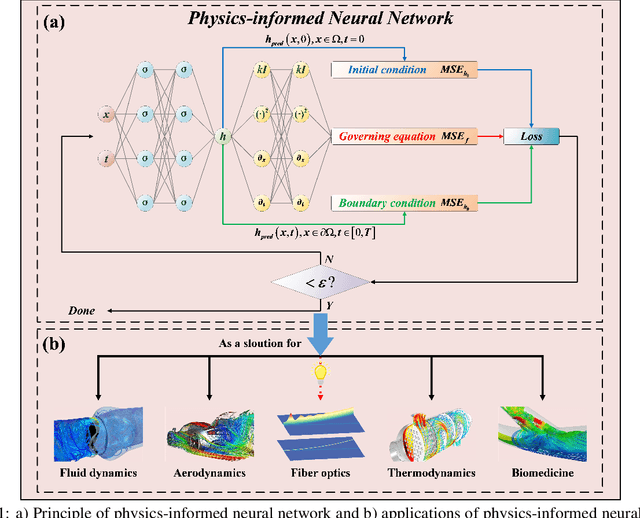
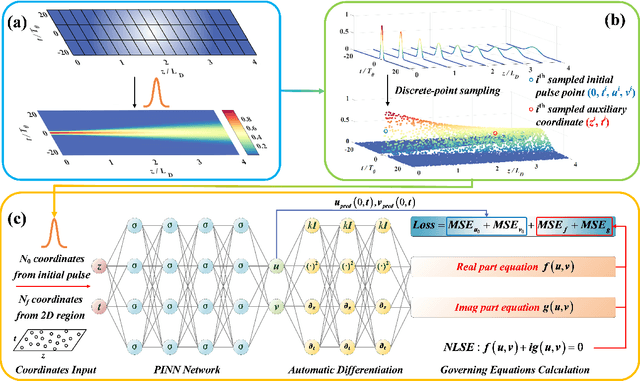
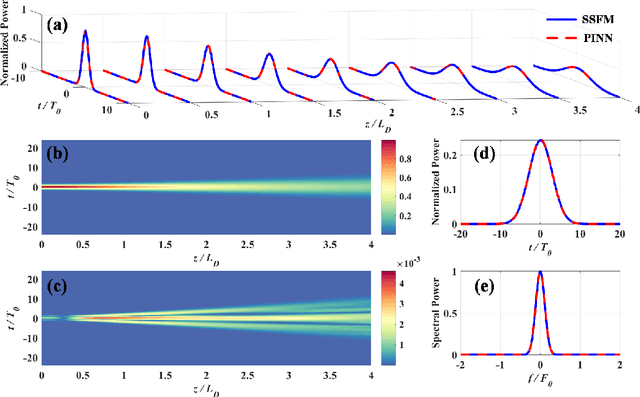
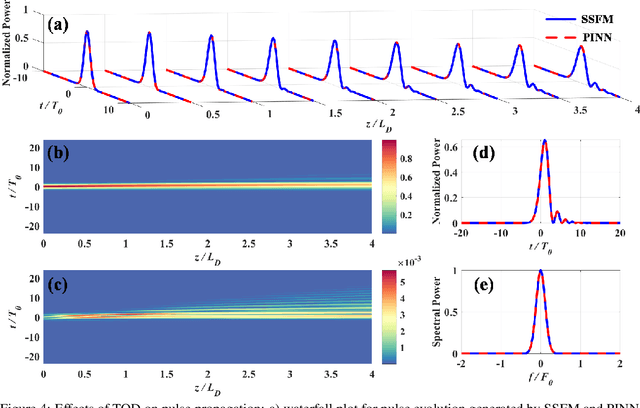
A physics-informed neural network (PINN) that combines deep learning with physics is studied to solve the nonlinear Schr\"odinger equation for learning nonlinear dynamics in fiber optics. We carry out a systematic investigation and comprehensive verification on PINN for multiple physical effects in optical fibers, including dispersion, self-phase modulation, and higher-order nonlinear effects. Moreover, both special case (soliton propagation) and general case (multi-pulse propagation) are investigated and realized with PINN. In the previous studies, the PINN was mainly effective for single scenario. To overcome this problem, the physical parameters (pulse peak power and amplitudes of sub-pulses) are hereby embedded as additional input parameter controllers, which allow PINN to learn the physical constraints of different scenarios and perform good generalizability. Furthermore, PINN exhibits better performance than the data-driven neural network using much less data, and its computational complexity (in terms of number of multiplications) is much lower than that of the split-step Fourier method. The results report here show that the PINN is not only an effective partial differential equation solver, but also a prospective technique to advance the scientific computing and automatic modeling in fiber optics.