 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly Exiting U-Net for Efficient Processing on UAVs: A Case Study in Environmental Monitoring
Apr 15, 2026Oil spills represent a severe threat, making early-stage thickness estimation crucial for guiding remediation efforts. Unmanned Aerial Vehicles (UAVs) are an attractive platform for environmental monitoring. However, due to their limited computation and power budgets, real-time onboard processing requires optimized algorithms or lightweight machine learning models. While the standard U-Net architecture is often too large for constrained UAV hardware, the compressed Tiny U-Net variant fits on FPGA platforms and achieves competitive estimation performance (0.79 in the metric Intersection over Union, or IoU). Despite this success, Tiny U-Net processes every radar image through the complete inference pipeline, resulting in unnecessary computation for simple cases. To address this inefficiency, we integrate an early exit feature into the Tiny U-Net architecture. We introduce an early exit branch that returns an early prediction when a compact confidence score exceeds a tunable threshold, bypassing deeper layers for high-confidence evaluations. Our experiments demonstrate that this design achieves comparable IoU to the full baseline model. Crucially, the technique is shown to reduce the average number of multiplications by up to 42% for an aggressive threshold, reducing the dynamic power consumption. Choosing a threshold that ensures extreme confidence reduces the complexity-reduction gains for an improved IoU. This early exit approach substantially improves computational efficiency in Tiny U-Net, enabling more practical deployment in UAV-based environmental monitoring systems.
A Case Study on Energy-Efficient Edge AI Crack Segmentation
Apr 15, 2026Crack segmentation on edge devices can support continuous infrastructure monitoring and maintenance and thereby help to preserve public safety. Furthermore, autonomous infrastructure monitoring by using Unmanned Aerial Vehicles (UAVs) can reduce inspection risks, as human operators no longer need to enter hazardous areas. Edge processing reduces the cost of inspection by eliminating the need for high resolution image storage for offline processing and mitigates the security risks and bandwidth requirements of streaming to cloud servers. Edge inference is difficult due to the limited memory and computational capabilities of edge devices, which can affect both accuracy and latency. Furthermore, battery-powered devices are subject to strict power and energy constraints. Together, these limitations impose restrictions on the model size and computational complexity that can be deployed close to the sensor. In recent years, Transformers have achieved state-of-the-art accuracy in a variety of applications, including semantic segmentation. However, Transformer-based models are typically large and computationally intensive, making efficient edge deployment difficult. To address this, we first apply knowledge distillation to enhance the performance of the base models. We then use PTQ to compress the models further. Additionally, we consider the deployment of these models across multiple edge platforms. To maximize energy efficiency, we design and implement a custom hardware architecture for the models on an FPGA. Our results show that Knowledge Distillation (KD) improves all tested U-Net variants. Among the evaluated platforms, the selected FPGA implementation achieves 398 FPS at 204.99 Frames/J while maintaining a mean IoU of 69.42%. In addition, our best model reaches 71.92% mean IoU, which is 8.82 percentage points (pps) higher than the previously reported result on the CrackVision12K dataset.
Smart Environmental Monitoring of Marine Pollution using Edge AI
Apr 30, 2025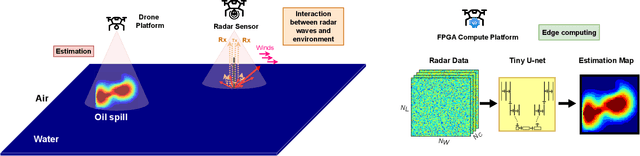
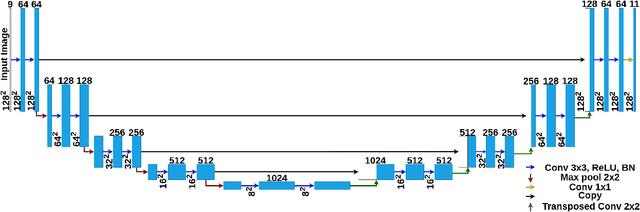
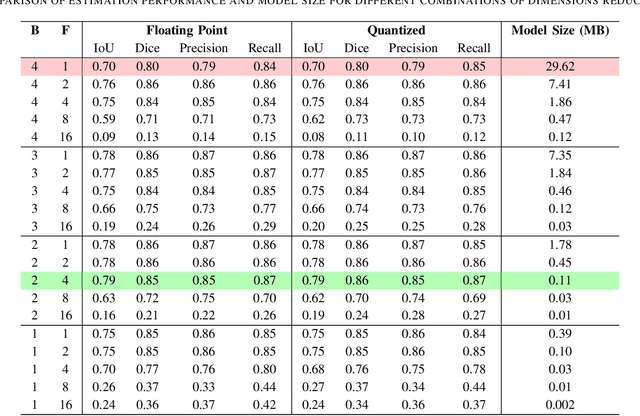
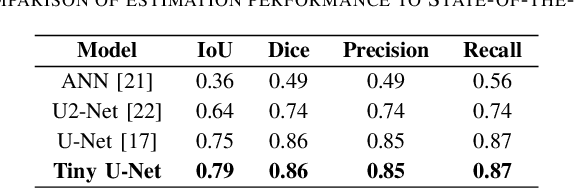
Oil spill incidents pose severe threats to marine ecosystems and coastal environments, necessitating rapid detection and monitoring capabilities to mitigate environmental damage. In this paper, we demonstrate how artificial intelligence, despite the inherent high computational and memory requirements, can be efficiently integrated into marine pollution monitoring systems. More precisely, we propose a drone-based smart monitoring system leveraging a compressed deep learning U-Net architecture for oil spill detection and thickness estimation. Compared to the standard U-Net architecture, the number of convolution blocks and channels per block are modified. The new model is then trained on synthetic radar data to accurately predict thick oil slick thickness up to 10 mm. Results show that our optimized Tiny U-Net achieves superior performance with an Intersection over Union (IoU) metric of approximately 79%, while simultaneously reducing the model size by a factor of $\sim$269x compared to the state-of-the-art. This significant model compression enables efficient edge computing deployment on field-programmable gate array (FPGA) hardware integrated directly into the drone platform. Hardware implementation demonstrates near real-time thickness estimation capabilities with a run-time power consumption of approximately 2.2 watts. Our findings highlight the increasing potential of smart monitoring technologies and efficient edge computing for operational characterization in marine environments.
Efficient FPGA Implementation of an Optimized SNN-based DFE for Optical Communications
Sep 13, 2024The ever-increasing demand for higher data rates in communication systems intensifies the need for advanced non-linear equalizers capable of higher performance. Recently artificial neural networks (ANNs) were introduced as a viable candidate for advanced non-linear equalizers, as they outperform traditional methods. However, they are computationally complex and therefore power hungry. Spiking neural networks (SNNs) started to gain attention as an energy-efficient alternative to ANNs. Recent works proved that they can outperform ANNs at this task. In this work, we explore the design space of an SNN-based decision-feedback equalizer (DFE) to reduce its computational complexity for an efficient implementation on field programmable gate array (FPGA). Our Results prove that it achieves higher communication performance than ANN-based DFE at roughly the same throughput and at 25X higher energy efficiency.