 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMolmoAct2: Action Reasoning Models for Real-world Deployment
May 04, 2026Vision-Language-Action (VLA) models aim to provide a single generalist controller for robots, but today's systems fall short on the criteria that matter for real-world deployment. Frontier models are closed, open-weight alternatives are tied to expensive hardware, reasoning-augmented policies pay prohibitive latency for their grounding, and fine-tuned success rates remain below the threshold for dependable use. We present MolmoAct2, a fully open action reasoning model built for practical deployment, advancing its predecessor along five axes. We introduce MolmoER, a VLM backbone specialized for spatial and embodied reasoning, trained on a 3.3M-sample corpus with a specialize-then-rehearse recipe. We release three new datasets spanning low-to-medium cost platforms, including MolmoAct2-BimanualYAM, 720 hours of teleoperated bimanual trajectories that constitute the largest open bimanual dataset to date, together with quality-filtered Franka (DROID) and SO100/101 subsets. We provide OpenFAST, an open-weight, open-data action tokenizer trained on millions of trajectories across five embodiments. We redesign the architecture to graft a flow-matching continuous-action expert onto a discrete-token VLM via per-layer KV-cache conditioning. Finally, we propose MolmoThink, an adaptive-depth reasoning variant that re-predicts depth tokens only for scene regions that change between timesteps, retaining geometric grounding at a fraction of prior latency. In the most extensive empirical study of any open VLA to date, spanning 7 simulation and real-world benchmarks, MolmoAct2 outperforms strong baselines including Pi-05, while MolmoER surpasses GPT-5 and Gemini Robotics ER-1.5 across 13 embodied-reasoning benchmarks. We release model weights, training code, and complete training data. Project page: https://allenai.org/blog/molmoact2
MolmoB0T: Large-Scale Simulation Enables Zero-Shot Manipulation
Mar 17, 2026A prevailing view in robot learning is that simulation alone is not enough; effective sim-to-real transfer is widely believed to require at least some real-world data collection or task-specific fine-tuning to bridge the gap between simulated and physical environments. We challenge that assumption. With sufficiently large-scale and diverse simulated synthetic training data, we show that zero-shot transfer to the real world is not only possible, but effective for both static and mobile manipulation. We introduce MolmoBot-Engine, a fully open-source pipeline for procedural data generation across robots, tasks, and diverse simulated environments in MolmoSpaces. With it, we release MolmoBot-Data, a dataset of 1.8 million expert trajectories for articulated object manipulation and pick-and-place tasks. We train three policy classes: MolmoBot, a Molmo2-based multi-frame vision-language model with a flow-matching action head; MolmoBot-Pi0, which replicates the $π_0$ architecture to enable direct comparison; and MolmoBot-SPOC, a lightweight policy suitable for edge deployment and amenable to RL fine-tuning. We evaluate on two robotic platforms: the Franka FR3 for tabletop manipulation tasks and the Rainbow Robotics RB-Y1 mobile manipulator for door opening, drawer manipulation, cabinet interaction, and mobile pick-and-place. Without any real-world fine-tuning, our policies achieve zero-shot transfer to unseen objects and environments. On tabletop pick-and-place, MolmoBot achieves a success rate of 79.2% in real world evaluations across 4 settings, outperforming $π_{0.5}$ at 39.2%. Our results demonstrate that procedural environment generation combined with diverse articulated assets can produce robust manipulation policies that generalize broadly to the real world. Technical Blog: https://allenai.org/blog/molmobot-robot-manipulation
MolmoSpaces: A Large-Scale Open Ecosystem for Robot Navigation and Manipulation
Feb 11, 2026Deploying robots at scale demands robustness to the long tail of everyday situations. The countless variations in scene layout, object geometry, and task specifications that characterize real environments are vast and underrepresented in existing robot benchmarks. Measuring this level of generalization requires infrastructure at a scale and diversity that physical evaluation alone cannot provide. We introduce MolmoSpaces, a fully open ecosystem to support large-scale benchmarking of robot policies. MolmoSpaces consists of over 230k diverse indoor environments, ranging from handcrafted household scenes to procedurally generated multiroom houses, populated with 130k richly annotated object assets, including 48k manipulable objects with 42M stable grasps. Crucially, these environments are simulator-agnostic, supporting popular options such as MuJoCo, Isaac, and ManiSkill. The ecosystem supports the full spectrum of embodied tasks: static and mobile manipulation, navigation, and multiroom long-horizon tasks requiring coordinated perception, planning, and interaction across entire indoor environments. We also design MolmoSpaces-Bench, a benchmark suite of 8 tasks in which robots interact with our diverse scenes and richly annotated objects. Our experiments show MolmoSpaces-Bench exhibits strong sim-to-real correlation (R = 0.96, \r{ho} = 0.98), confirm newer and stronger zero-shot policies outperform earlier versions in our benchmarks, and identify key sensitivities to prompt phrasing, initial joint positions, and camera occlusion. Through MolmoSpaces and its open-source assets and tooling, we provide a foundation for scalable data generation, policy training, and benchmark creation for robot learning research.
Convergent Functions, Divergent Forms
May 27, 2025We introduce LOKI, a compute-efficient framework for co-designing morphologies and control policies that generalize across unseen tasks. Inspired by biological adaptation -- where animals quickly adjust to morphological changes -- our method overcomes the inefficiencies of traditional evolutionary and quality-diversity algorithms. We propose learning convergent functions: shared control policies trained across clusters of morphologically similar designs in a learned latent space, drastically reducing the training cost per design. Simultaneously, we promote divergent forms by replacing mutation with dynamic local search, enabling broader exploration and preventing premature convergence. The policy reuse allows us to explore 780$\times$ more designs using 78% fewer simulation steps and 40% less compute per design. Local competition paired with a broader search results in a diverse set of high-performing final morphologies. Using the UNIMAL design space and a flat-terrain locomotion task, LOKI discovers a rich variety of designs -- ranging from quadrupeds to crabs, bipedals, and spinners -- far more diverse than those produced by prior work. These morphologies also transfer better to unseen downstream tasks in agility, stability, and manipulation domains (e.g., 2$\times$ higher reward on bump and push box incline tasks). Overall, our approach produces designs that are both diverse and adaptable, with substantially greater sample efficiency than existing co-design methods. (Project website: https://loki-codesign.github.io/)
PointArena: Probing Multimodal Grounding Through Language-Guided Pointing
May 15, 2025Pointing serves as a fundamental and intuitive mechanism for grounding language within visual contexts, with applications spanning robotics, assistive technologies, and interactive AI systems. While recent multimodal models have started to support pointing capabilities, existing benchmarks typically focus only on referential object localization tasks. We introduce PointArena, a comprehensive platform for evaluating multimodal pointing across diverse reasoning scenarios. PointArena comprises three components: (1) Point-Bench, a curated dataset containing approximately 1,000 pointing tasks across five reasoning categories; (2) Point-Battle, an interactive, web-based arena facilitating blind, pairwise model comparisons, which has already gathered over 4,500 anonymized votes; and (3) Point-Act, a real-world robotic manipulation system allowing users to directly evaluate multimodal model pointing capabilities in practical settings. We conducted extensive evaluations of both state-of-the-art open-source and proprietary multimodal models. Results indicate that Molmo-72B consistently outperforms other models, though proprietary models increasingly demonstrate comparable performance. Additionally, we find that supervised training specifically targeting pointing tasks significantly enhances model performance. Across our multi-stage evaluation pipeline, we also observe strong correlations, underscoring the critical role of precise pointing capabilities in enabling multimodal models to effectively bridge abstract reasoning with concrete, real-world actions. Project page: https://pointarena.github.io/
The One RING: a Robotic Indoor Navigation Generalist
Dec 18, 2024



Modern robots vary significantly in shape, size, and sensor configurations used to perceive and interact with their environments. However, most navigation policies are embodiment-specific; a policy learned using one robot's configuration does not typically gracefully generalize to another. Even small changes in the body size or camera viewpoint may cause failures. With the recent surge in custom hardware developments, it is necessary to learn a single policy that can be transferred to other embodiments, eliminating the need to (re)train for each specific robot. In this paper, we introduce RING (Robotic Indoor Navigation Generalist), an embodiment-agnostic policy, trained solely in simulation with diverse randomly initialized embodiments at scale. Specifically, we augment the AI2-THOR simulator with the ability to instantiate robot embodiments with controllable configurations, varying across body size, rotation pivot point, and camera configurations. In the visual object-goal navigation task, RING achieves robust performance on real unseen robot platforms (Stretch RE-1, LoCoBot, Unitree's Go1), achieving an average of 72.1% and 78.9% success rate across 5 embodiments in simulation and 4 robot platforms in the real world. (project website: https://one-ring-policy.allen.ai/)
Selective Visual Representations Improve Convergence and Generalization for Embodied AI
Nov 07, 2023



Embodied AI models often employ off the shelf vision backbones like CLIP to encode their visual observations. Although such general purpose representations encode rich syntactic and semantic information about the scene, much of this information is often irrelevant to the specific task at hand. This introduces noise within the learning process and distracts the agent's focus from task-relevant visual cues. Inspired by selective attention in humans-the process through which people filter their perception based on their experiences, knowledge, and the task at hand-we introduce a parameter-efficient approach to filter visual stimuli for embodied AI. Our approach induces a task-conditioned bottleneck using a small learnable codebook module. This codebook is trained jointly to optimize task reward and acts as a task-conditioned selective filter over the visual observation. Our experiments showcase state-of-the-art performance for object goal navigation and object displacement across 5 benchmarks, ProcTHOR, ArchitecTHOR, RoboTHOR, AI2-iTHOR, and ManipulaTHOR. The filtered representations produced by the codebook are also able generalize better and converge faster when adapted to other simulation environments such as Habitat. Our qualitative analyses show that agents explore their environments more effectively and their representations retain task-relevant information like target object recognition while ignoring superfluous information about other objects. Code and pretrained models are available at our project website: https://embodied-codebook.github.io.
Omnidata: A Scalable Pipeline for Making Multi-Task Mid-Level Vision Datasets from 3D Scans
Oct 11, 2021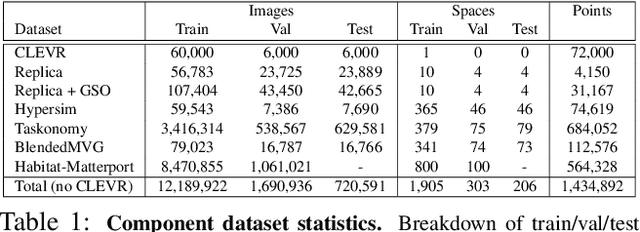
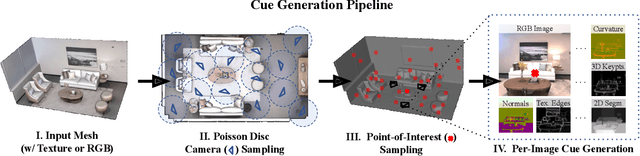
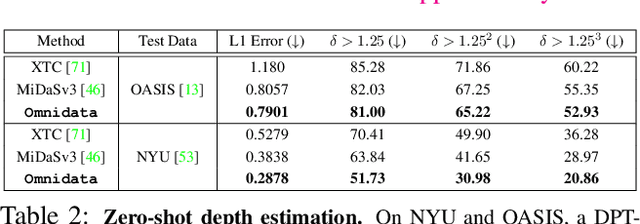
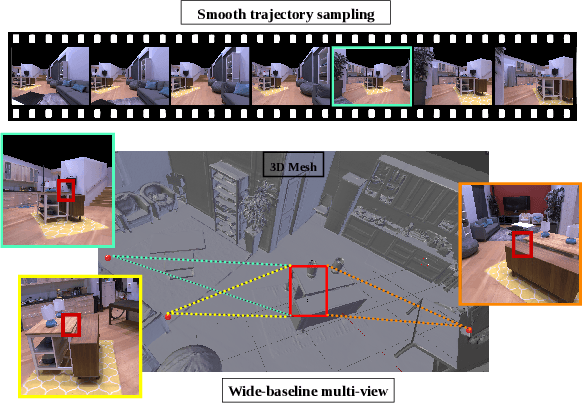
This paper introduces a pipeline to parametrically sample and render multi-task vision datasets from comprehensive 3D scans from the real world. Changing the sampling parameters allows one to "steer" the generated datasets to emphasize specific information. In addition to enabling interesting lines of research, we show the tooling and generated data suffice to train robust vision models. Common architectures trained on a generated starter dataset reached state-of-the-art performance on multiple common vision tasks and benchmarks, despite having seen no benchmark or non-pipeline data. The depth estimation network outperforms MiDaS and the surface normal estimation network is the first to achieve human-level performance for in-the-wild surface normal estimation -- at least according to one metric on the OASIS benchmark. The Dockerized pipeline with CLI, the (mostly python) code, PyTorch dataloaders for the generated data, the generated starter dataset, download scripts and other utilities are available through our project website, https://omnidata.vision.
Puzzle-AE: Novelty Detection in Images through Solving Puzzles
Aug 29, 2020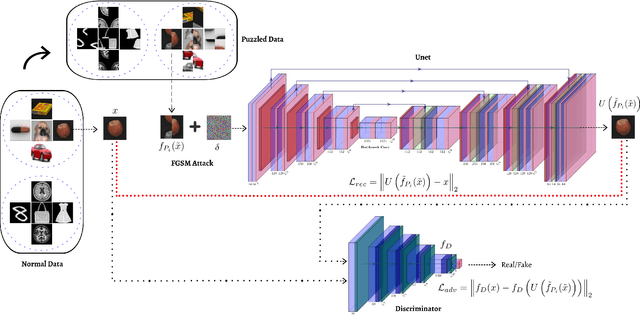
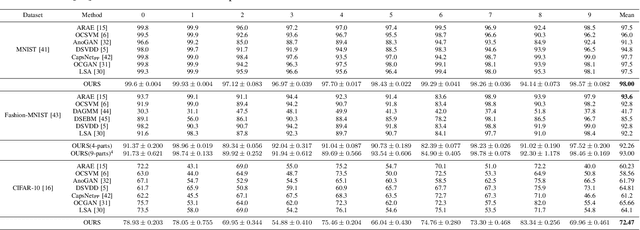
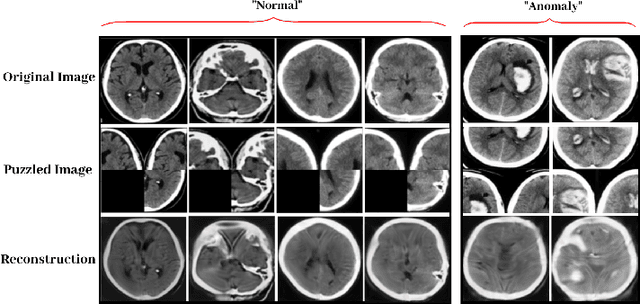

Autoencoder (AE) has proved to be an effective framework for novelty detection. However, they do not typically show promising results on other kinds of real-world datasets, which are exhibiting high intra-class variations, such as CIFAR-10. AEs are not generally able to learn a latent space that solely captures common features of the normal class, resulting in both high false positive and false negative rates due to modeling features that are irrelevant to the normal class. Recently, self-supervised learning has shown great promise in representation learning. To this end, we propose a new AE framework that is trained based on solving puzzles on randomly permuted image patches. Based on this framework, we achieve competitive or superior results compared to SOTA anomaly detection methods on various toy and real-world datasets. Unlike many competitors in this field, the proposed framework is stable, has real-time performance, more general and agnostic to choices of the model hyper-parameters, can work effectively under small sample size settings, and does not require unprincipled early stopping.