 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"autonomous cars": models, code, and papers
Towards the Verification of Safety-critical Autonomous Systems in Dynamic Environments
Dec 15, 2016
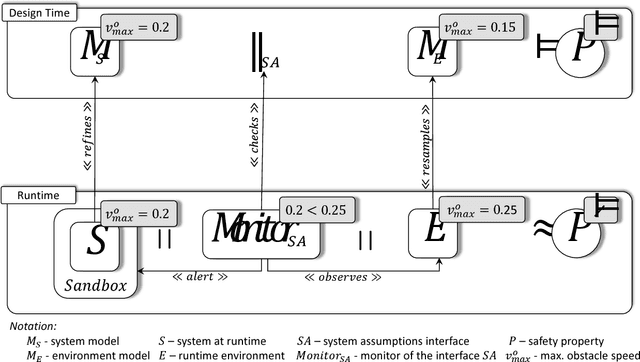
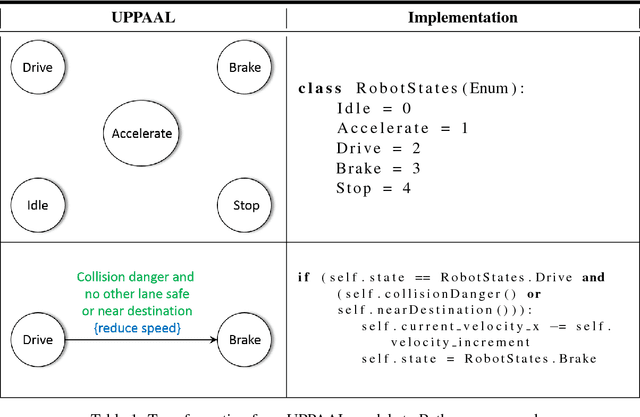
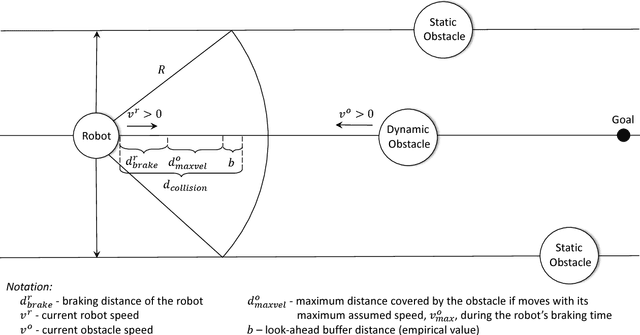
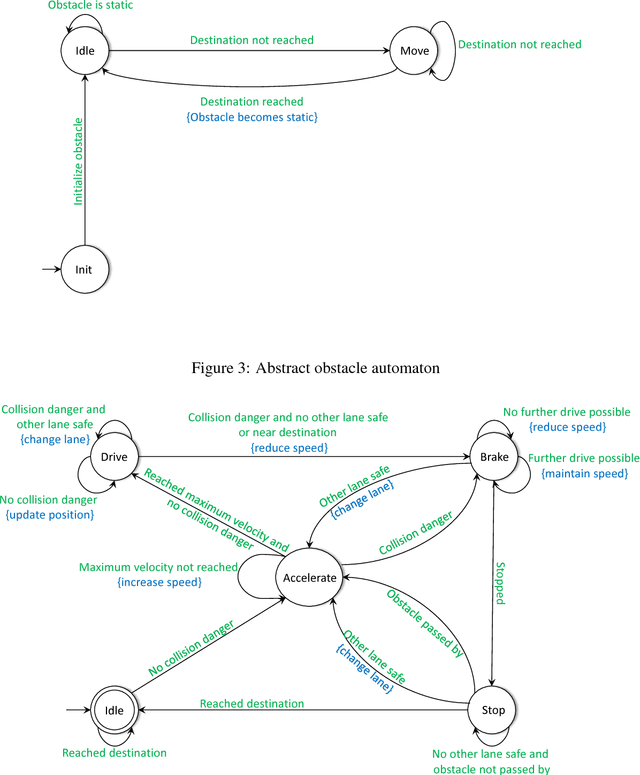
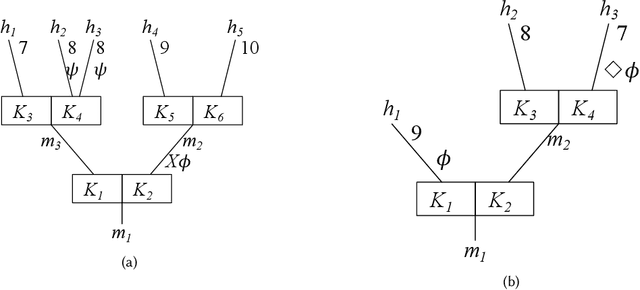
There is an increasing necessity to deploy autonomous systems in highly heterogeneous, dynamic environments, e.g. service robots in hospitals or autonomous cars on highways. Due to the uncertainty in these environments, the verification results obtained with respect to the system and environment models at design-time might not be transferable to the system behavior at run time. For autonomous systems operating in dynamic environments, safety of motion and collision avoidance are critical requirements. With regard to these requirements, Macek et al. [6] define the passive safety property, which requires that no collision can occur while the autonomous system is moving. To verify this property, we adopt a two phase process which combines static verification methods, used at design time, with dynamic ones, used at run time. In the design phase, we exploit UPPAAL to formalize the autonomous system and its environment as timed automata and the safety property as TCTL formula and to verify the correctness of these models with respect to this property. For the runtime phase, we build a monitor to check whether the assumptions made at design time are also correct at run time. If the current system observations of the environment do not correspond to the initial system assumptions, the monitor sends feedback to the system and the system enters a passive safe state.
* In Proceedings V2CPS-16, arXiv:1612.04023
A Nonlinear Constrained Optimization Framework for Comfortable and Customizable Motion Planning of Nonholonomic Mobile Robots - Part II
May 22, 2013
In this series of papers, we present a motion planning framework for planning comfortable and customizable motion of nonholonomic mobile robots such as intelligent wheelchairs and autonomous cars. In Part I, we presented the mathematical foundation of our framework, where we model motion discomfort as a weighted cost functional and define comfortable motion planning as a nonlinear constrained optimization problem of computing trajectories that minimize this discomfort given the appropriate boundary conditions and constraints. In this paper, we discretize the infinite-dimensional optimization problem using conforming finite elements. We describe shape functions to handle different kinds of boundary conditions and the choice of unknowns to obtain a sparse Hessian matrix. We also describe in detail how any trajectory computation problem can have infinitely many locally optimal solutions and our method of handling them. Additionally, since we have a nonlinear and constrained problem, computation of high quality initial guesses is crucial for efficient solution. We show how to compute them.
Towards End-to-End Lane Detection: an Instance Segmentation Approach
Feb 15, 2018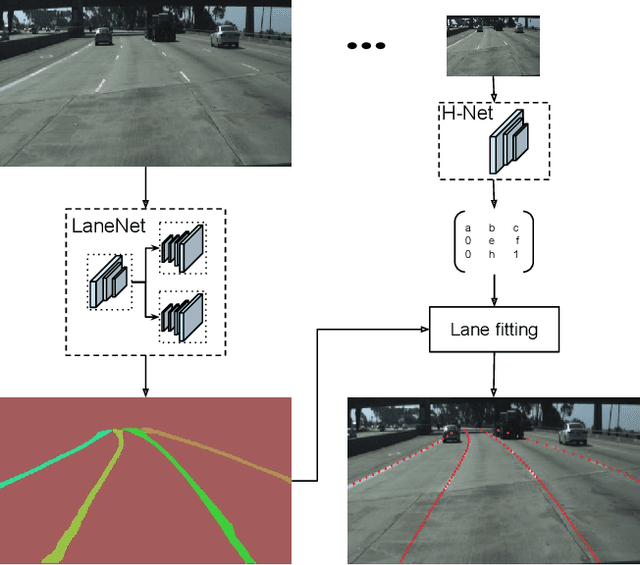
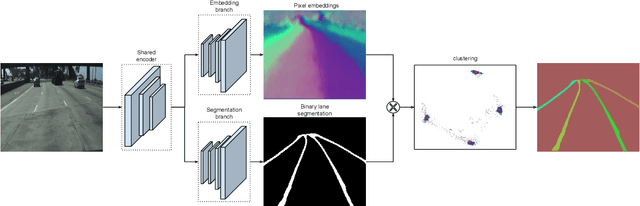
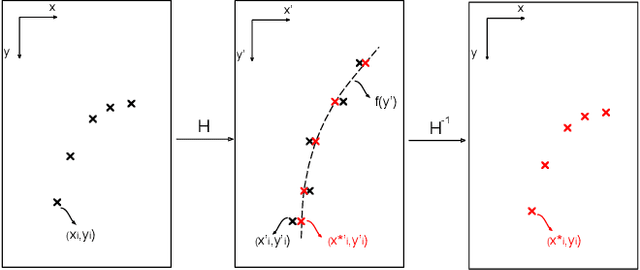
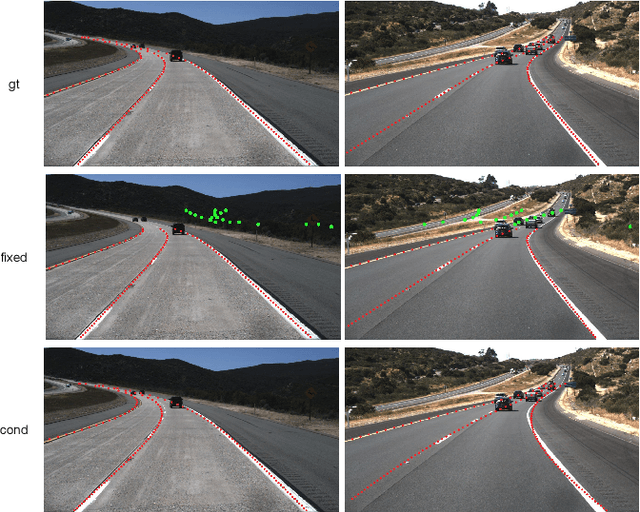
Modern cars are incorporating an increasing number of driver assist features, among which automatic lane keeping. The latter allows the car to properly position itself within the road lanes, which is also crucial for any subsequent lane departure or trajectory planning decision in fully autonomous cars. Traditional lane detection methods rely on a combination of highly-specialized, hand-crafted features and heuristics, usually followed by post-processing techniques, that are computationally expensive and prone to scalability due to road scene variations. More recent approaches leverage deep learning models, trained for pixel-wise lane segmentation, even when no markings are present in the image due to their big receptive field. Despite their advantages, these methods are limited to detecting a pre-defined, fixed number of lanes, e.g. ego-lanes, and can not cope with lane changes. In this paper, we go beyond the aforementioned limitations and propose to cast the lane detection problem as an instance segmentation problem - in which each lane forms its own instance - that can be trained end-to-end. To parametrize the segmented lane instances before fitting the lane, we further propose to apply a learned perspective transformation, conditioned on the image, in contrast to a fixed "bird's-eye view" transformation. By doing so, we ensure a lane fitting which is robust against road plane changes, unlike existing approaches that rely on a fixed, pre-defined transformation. In summary, we propose a fast lane detection algorithm, running at 50 fps, which can handle a variable number of lanes and cope with lane changes. We verify our method on the tuSimple dataset and achieve competitive results.
Reliable counting of weakly labeled concepts by a single spiking neuron model
May 19, 2018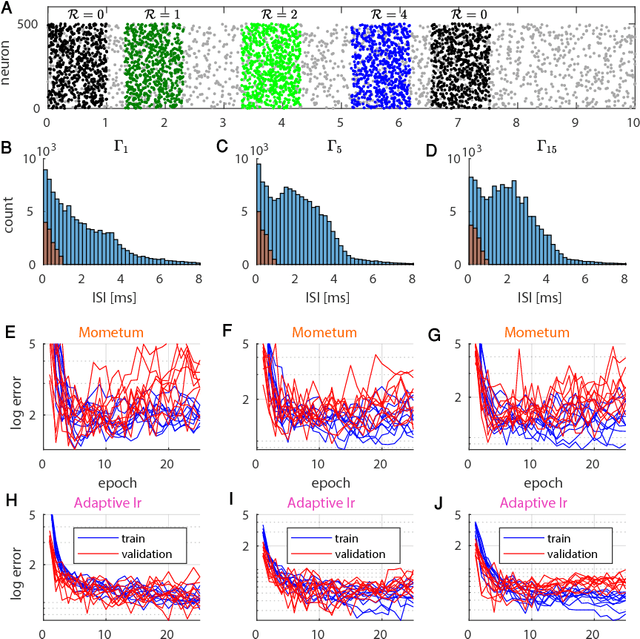
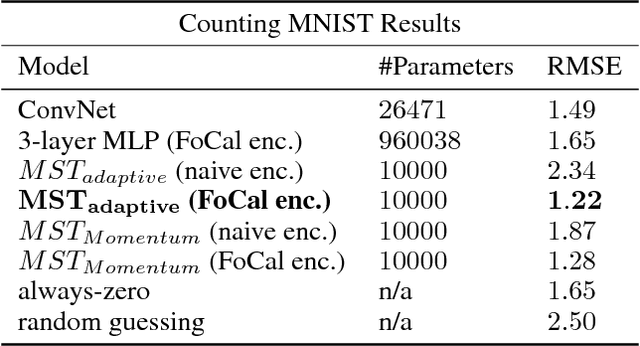
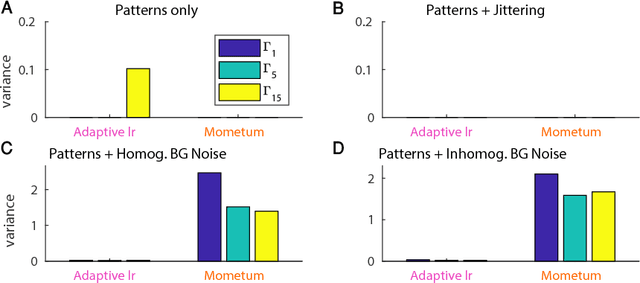
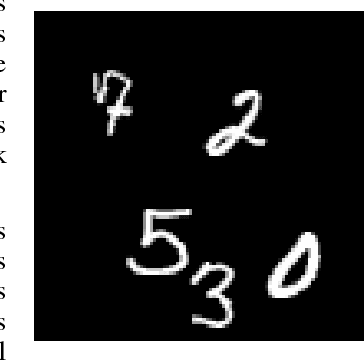
Making an informed, correct and quick decision can be life-saving. It's crucial for animals during an escape behaviour or for autonomous cars during driving. The decision can be complex and may involve an assessment of the amount of threats present and the nature of each threat. Thus, we should expect early sensory processing to supply classification information fast and accurately, even before relying the information to higher brain areas or more complex system components downstream. Today, advanced convolution artificial neural networks can successfully solve such tasks and are commonly used to build complex decision making systems. However, in order to achieve excellent performance on these tasks they require increasingly complex, "very deep" model structure, which is costly in inference run-time, energy consumption and training samples, only trainable on cloud-computing clusters. A single spiking neuron has been shown to be able to solve many of these required tasks for homogeneous Poisson input statistics, a commonly used model for spiking activity in the neocortex; when modeled as leaky integrate and fire with gradient decent learning algorithm it was shown to posses a wide variety of complex computational capabilities. Here we improve its learning algorithm. We also account for more natural stimulus generated inputs that deviate from this homogeneous Poisson spiking. The improved gradient-based local learning rule allows for significantly better and stable generalization and more efficient performance. We finally apply our model to a problem of multiple instance learning with counting where labels are only available for collections of concepts. In this counting MNIST task the neuron exploits the improved algorithm and succeeds while out performing the previously introduced single neuron learning algorithm as well as conventional ConvNet architecture under similar conditions.
View Vertically: A Hierarchical Network for Trajectory Prediction via Fourier Spectrums
Oct 14, 2021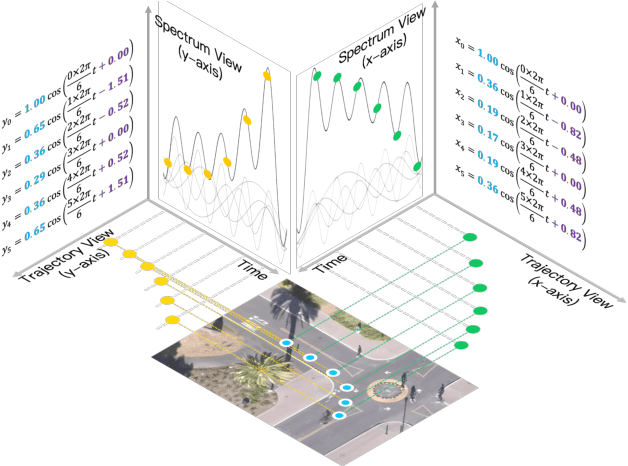
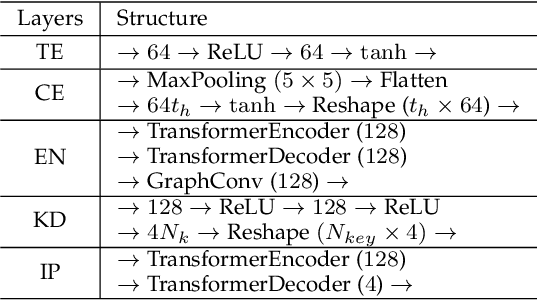
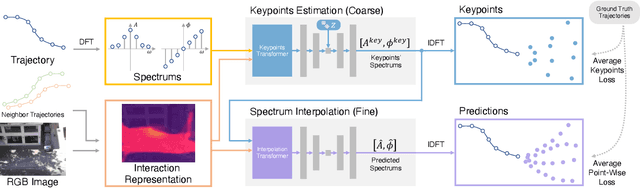
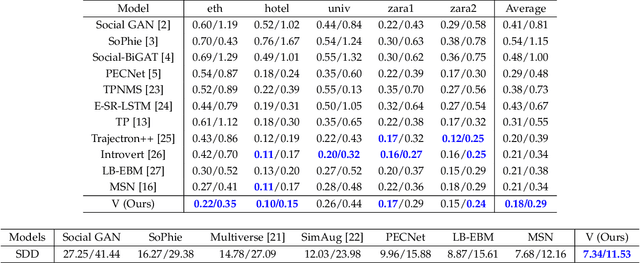
Learning to understand and predict future motions or behaviors for agents like humans and robots are critical to various autonomous platforms, such as behavior analysis, robot navigation, and self-driving cars. Intrinsic factors such as agents' diversified personalities and decision-making styles bring rich and diverse changes and multi-modal characteristics to their future plannings. Besides, the extrinsic interactive factors have also brought rich and varied changes to their trajectories. Previous methods mostly treat trajectories as time sequences, and reach great prediction performance. In this work, we try to focus on agents' trajectories in another view, i.e., the Fourier spectrums, to explore their future behavior rules in a novel hierarchical way. We propose the Transformer-based V model, which concatenates two continuous keypoints estimation and spectrum interpolation sub-networks, to model and predict agents' trajectories with spectrums in the keypoints and interactions levels respectively. Experimental results show that V outperforms most of current state-of-the-art methods on ETH-UCY and SDD trajectories dataset for about 15\% quantitative improvements, and performs better qualitative results.
Algorithmic Ethics: Formalization and Verification of Autonomous Vehicle Obligations
May 06, 2021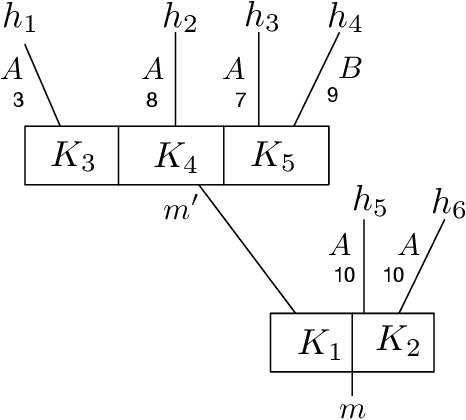
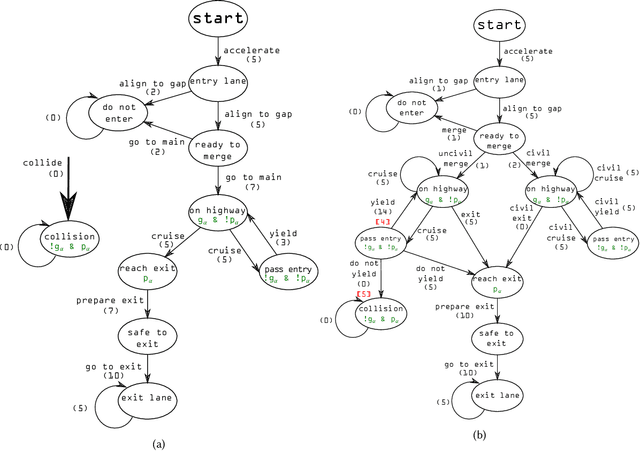
We develop a formal framework for automatic reasoning about the obligations of autonomous cyber-physical systems, including their social and ethical obligations. Obligations, permissions and prohibitions are distinct from a system's mission, and are a necessary part of specifying advanced, adaptive AI-equipped systems. They need a dedicated deontic logic of obligations to formalize them. Most existing deontic logics lack corresponding algorithms and system models that permit automatic verification. We demonstrate how a particular deontic logic, Dominance Act Utilitarianism (DAU), is a suitable starting point for formalizing the obligations of autonomous systems like self-driving cars. We demonstrate its usefulness by formalizing a subset of Responsibility-Sensitive Safety (RSS) in DAU; RSS is an industrial proposal for how self-driving cars should and should not behave in traffic. We show that certain logical consequences of RSS are undesirable, indicating a need to further refine the proposal. We also demonstrate how obligations can change over time, which is necessary for long-term autonomy. We then demonstrate a model-checking algorithm for DAU formulas on weighted transition systems, and illustrate it by model-checking obligations of a self-driving car controller from the literature.
Learning-Based Safety-Stability-Driven Control for Safety-Critical Systems under Model Uncertainties
Sep 15, 2020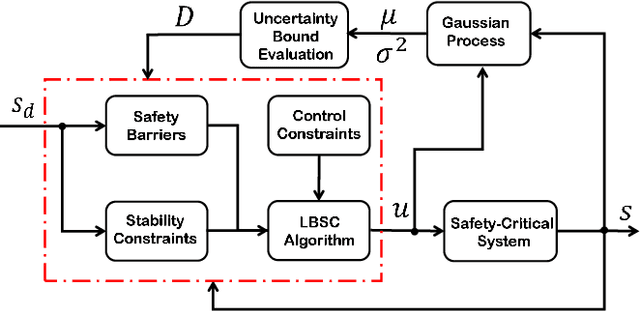
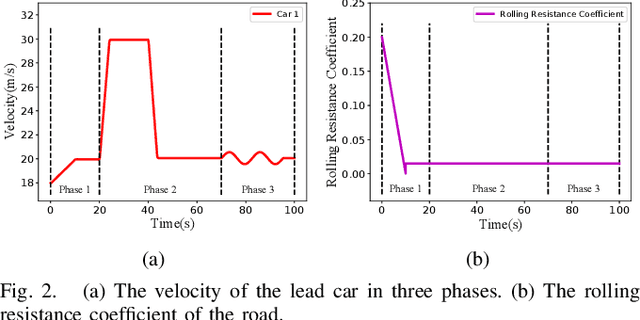
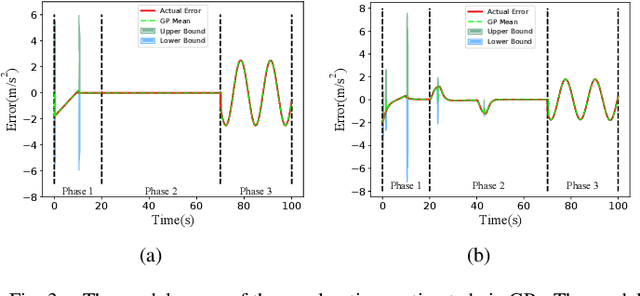
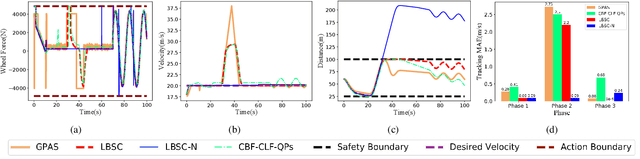
Safety and tracking stability are crucial for safety-critical systems such as self-driving cars, autonomous mobile robots, industrial manipulators. To efficiently control safety-critical systems to ensure their safety and achieve tracking stability, accurate system dynamic models are usually required. However, accurate system models are not always available in practice. In this paper, a learning-based safety-stability-driven control (LBSC) algorithm is presented to guarantee the safety and tracking stability for nonlinear safety-critical systems subject to control input constraints under model uncertainties. Gaussian Processes (GPs) are employed to learn the model error between the nominal model and the actual system dynamics, and the estimated mean and variance of the model error are used to quantify a high-confidence uncertainty bound. Using this estimated uncertainty bound, a safety barrier constraint is devised to ensure safety, and a stability constraint is developed to achieve rapid and accurate tracking. Then the proposed LBSC method is formulated as a quadratic program incorporating the safety barrier, the stability constraint, and the control constraints. The effectiveness of the LBSC method is illustrated on the safety-critical connected cruise control (CCC) system simulator under model uncertainties.
Trajectory Prediction with Latent Belief Energy-Based Model
Apr 07, 2021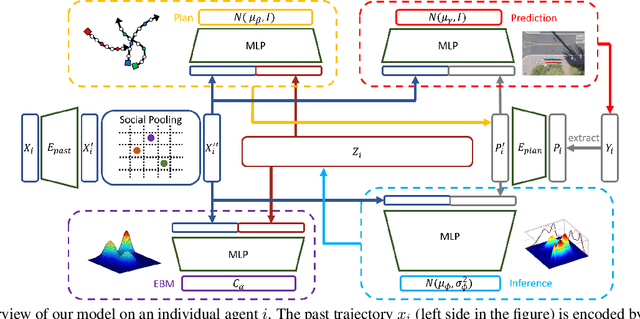
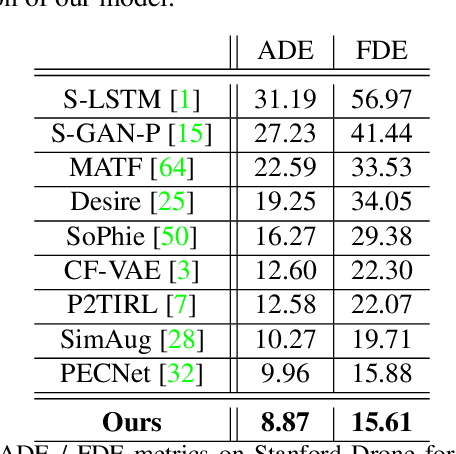
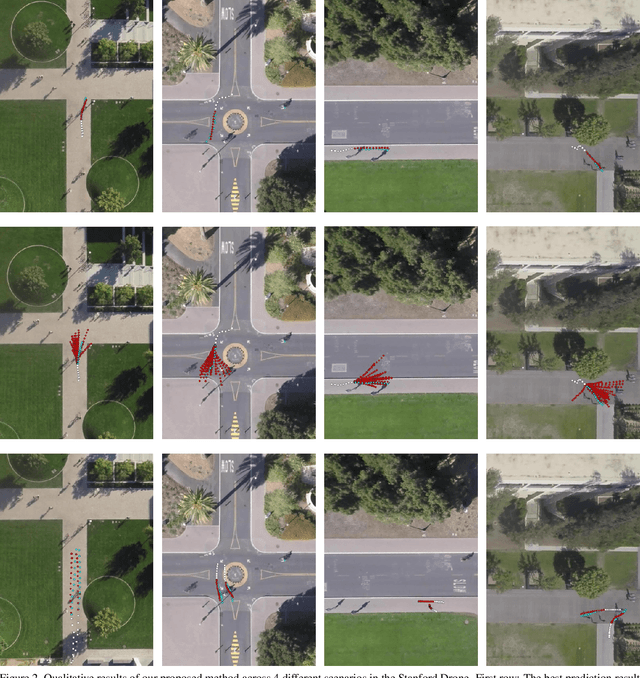
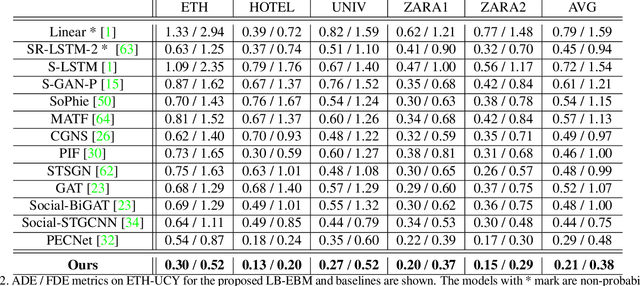
Human trajectory prediction is critical for autonomous platforms like self-driving cars or social robots. We present a latent belief energy-based model (LB-EBM) for diverse human trajectory forecast. LB-EBM is a probabilistic model with cost function defined in the latent space to account for the movement history and social context. The low-dimensionality of the latent space and the high expressivity of the EBM make it easy for the model to capture the multimodality of pedestrian trajectory distributions. LB-EBM is learned from expert demonstrations (i.e., human trajectories) projected into the latent space. Sampling from or optimizing the learned LB-EBM yields a belief vector which is used to make a path plan, which then in turn helps to predict a long-range trajectory. The effectiveness of LB-EBM and the two-step approach are supported by strong empirical results. Our model is able to make accurate, multi-modal, and social compliant trajectory predictions and improves over prior state-of-the-arts performance on the Stanford Drone trajectory prediction benchmark by 10.9% and on the ETH-UCY benchmark by 27.6%.
Decision-Based Adversarial Attacks: Reliable Attacks Against Black-Box Machine Learning Models
Feb 16, 2018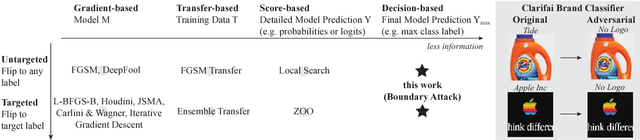
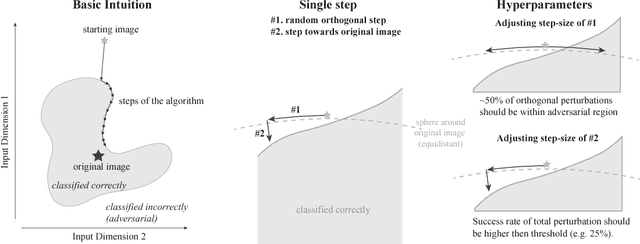
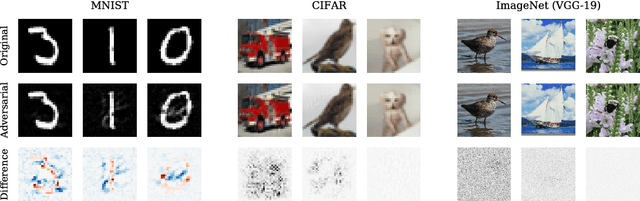
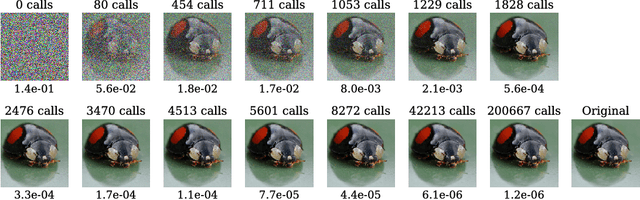
Many machine learning algorithms are vulnerable to almost imperceptible perturbations of their inputs. So far it was unclear how much risk adversarial perturbations carry for the safety of real-world machine learning applications because most methods used to generate such perturbations rely either on detailed model information (gradient-based attacks) or on confidence scores such as class probabilities (score-based attacks), neither of which are available in most real-world scenarios. In many such cases one currently needs to retreat to transfer-based attacks which rely on cumbersome substitute models, need access to the training data and can be defended against. Here we emphasise the importance of attacks which solely rely on the final model decision. Such decision-based attacks are (1) applicable to real-world black-box models such as autonomous cars, (2) need less knowledge and are easier to apply than transfer-based attacks and (3) are more robust to simple defences than gradient- or score-based attacks. Previous attacks in this category were limited to simple models or simple datasets. Here we introduce the Boundary Attack, a decision-based attack that starts from a large adversarial perturbation and then seeks to reduce the perturbation while staying adversarial. The attack is conceptually simple, requires close to no hyperparameter tuning, does not rely on substitute models and is competitive with the best gradient-based attacks in standard computer vision tasks like ImageNet. We apply the attack on two black-box algorithms from Clarifai.com. The Boundary Attack in particular and the class of decision-based attacks in general open new avenues to study the robustness of machine learning models and raise new questions regarding the safety of deployed machine learning systems. An implementation of the attack is available as part of Foolbox at https://github.com/bethgelab/foolbox .
Motion Prediction on Self-driving Cars: A Review
Nov 06, 2020
The autonomous vehicle motion prediction literature is reviewed. Motion prediction is the most challenging task in autonomous vehicles and self-drive cars. These challenges have been discussed. Later on, the state-of-theart has reviewed based on the most recent literature and the current challenges are discussed. The state-of-the-art consists of classical and physical methods, deep learning networks, and reinforcement learning. prons and cons of the methods and gap of the research presented in this review. Finally, the literature surrounding object tracking and motion will be presented. As a result, deep reinforcement learning is the best candidate to tackle self-driving cars.