 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Improving trajectory localization accuracy via direction-of-arrival estimation
Dec 07, 2022
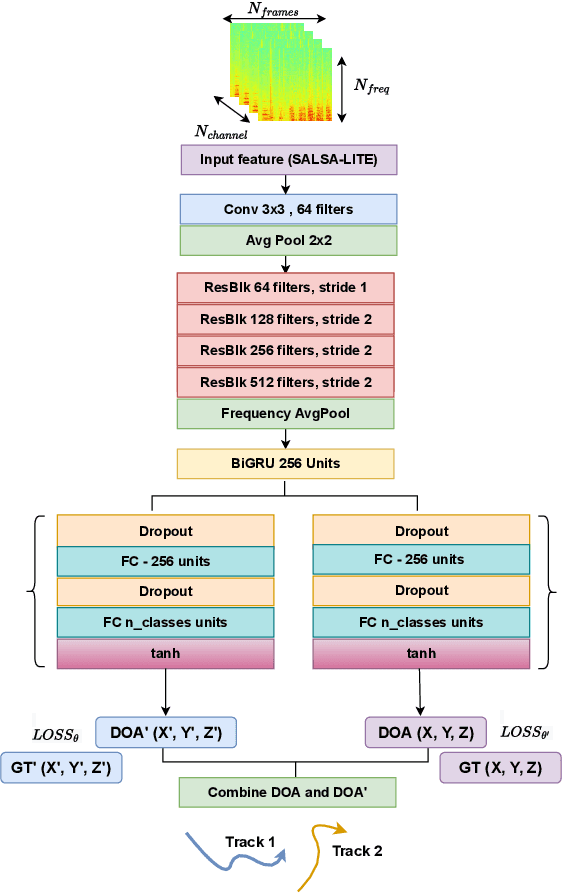
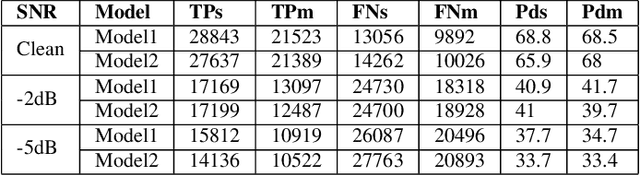
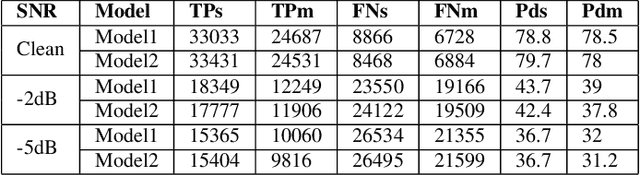
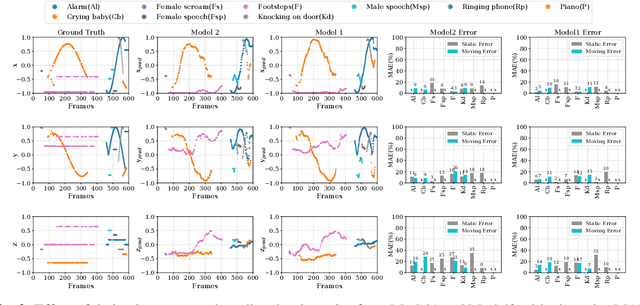
Sound source localization is crucial in acoustic sensing and monitoring-related applications. In this paper, we do a comprehensive analysis of improvement in sound source localization by combining the direction of arrivals (DOAs) with their derivatives which quantify the changes in the positions of sources over time. This study uses the SALSA-Lite feature with a convolutional recurrent neural network (CRNN) model for predicting DOAs and their first-order derivatives. An update rule is introduced to combine the predicted DOAs with the estimated derivatives to obtain the final DOAs. The experimental validation is done using TAU-NIGENS Spatial Sound Events (TNSSE) 2021 dataset. We compare the performance of the networks predicting DOAs with derivative vs. the one predicting only the DOAs at low SNR levels. The results show that combining the derivatives with the DOAs improves the localization accuracy of moving sources.
A Temporal Graph Neural Network for Cyber Attack Detection and Localization in Smart Grids
Dec 07, 2022
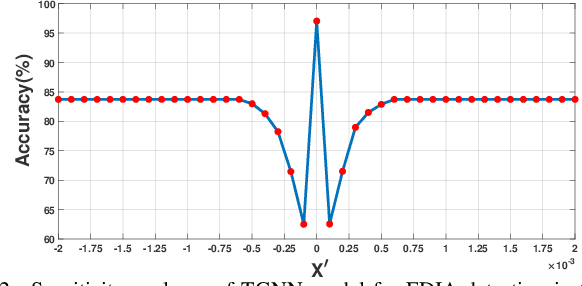
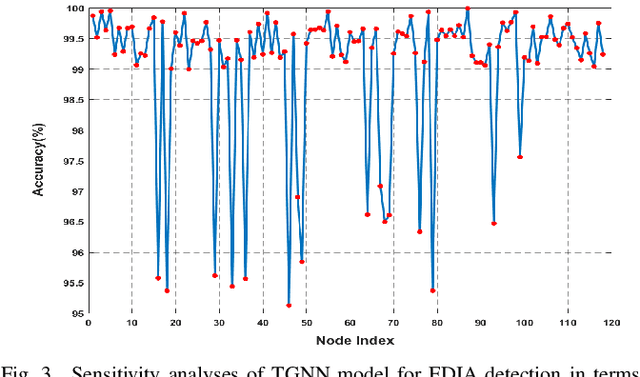
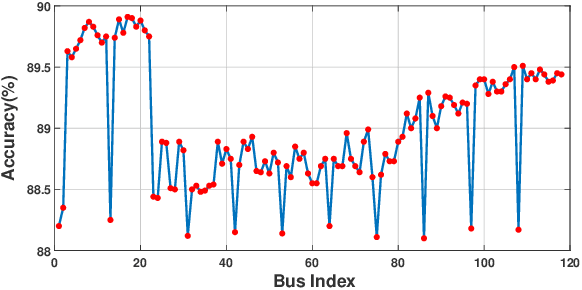
This paper presents a Temporal Graph Neural Network (TGNN) framework for detection and localization of false data injection and ramp attacks on the system state in smart grids. Capturing the topological information of the system through the GNN framework along with the state measurements can improve the performance of the detection mechanism. The problem is formulated as a classification problem through a GNN with message passing mechanism to identify abnormal measurements. The residual block used in the aggregation process of message passing and the gated recurrent unit can lead to improved computational time and performance. The performance of the proposed model has been evaluated through extensive simulations of power system states and attack scenarios showing promising performance. The sensitivity of the model to intensity and location of the attacks and model's detection delay versus detection accuracy have also been evaluated.
Error-bounded Approximate Time Series Joins using Compact Dictionary Representations of Time Series
Dec 24, 2021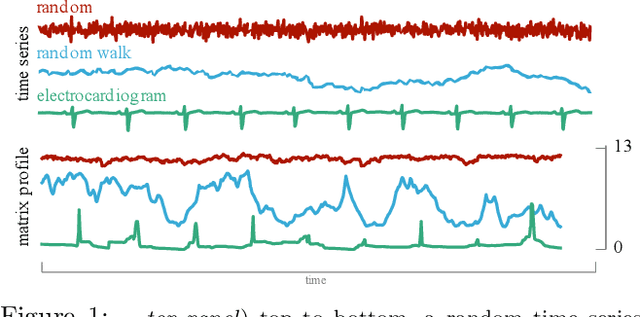
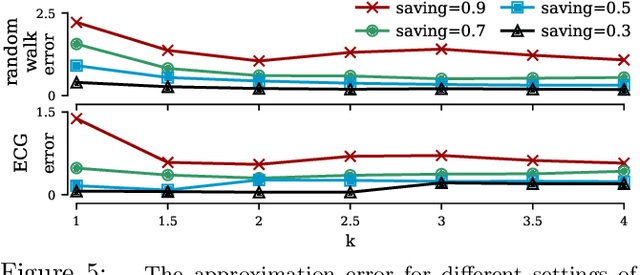
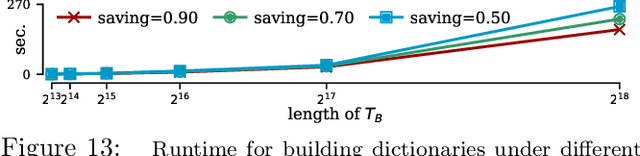
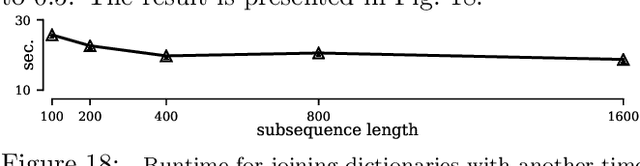
The matrix profile is an effective data mining tool that provides similarity join functionality for time series data. Users of the matrix profile can either join a time series with itself using intra-similarity join (i.e., self-join) or join a time series with another time series using inter-similarity join. By invoking either or both types of joins, the matrix profile can help users discover both conserved and anomalous structures in the data. Since the introduction of the matrix profile five years ago, multiple efforts have been made to speed up the computation with approximate joins; however, the majority of these efforts only focus on self-joins. In this work, we show that it is possible to efficiently perform approximate inter-time series similarity joins with error bounded guarantees by creating a compact "dictionary" representation of time series. Using the dictionary representation instead of the original time series, we are able to improve the throughput of an anomaly mining system by at least 20X, with essentially no decrease in accuracy. As a side effect, the dictionaries also summarize the time series in a semantically meaningful way and can provide intuitive and actionable insights. We demonstrate the utility of our dictionary-based inter-time series similarity joins on domains as diverse as medicine and transportation.
Prototypical context-aware dynamics generalization for high-dimensional model-based reinforcement learning
Nov 23, 2022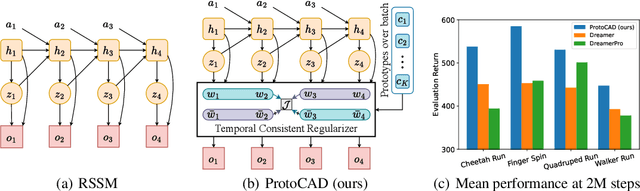
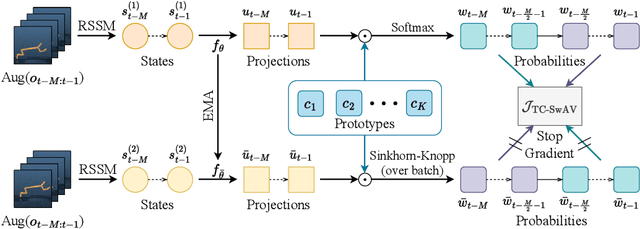
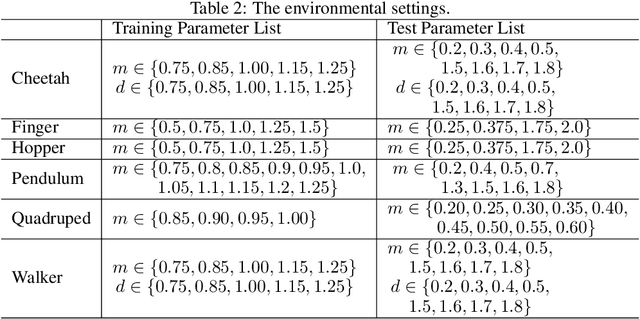
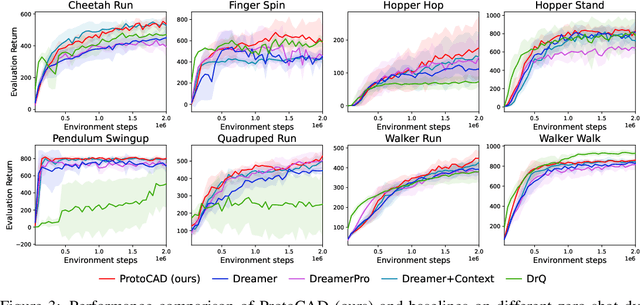
The latent world model provides a promising way to learn policies in a compact latent space for tasks with high-dimensional observations, however, its generalization across diverse environments with unseen dynamics remains challenging. Although the recurrent structure utilized in current advances helps to capture local dynamics, modeling only state transitions without an explicit understanding of environmental context limits the generalization ability of the dynamics model. To address this issue, we propose a Prototypical Context-Aware Dynamics (ProtoCAD) model, which captures the local dynamics by time consistent latent context and enables dynamics generalization in high-dimensional control tasks. ProtoCAD extracts useful contextual information with the help of the prototypes clustered over batch and benefits model-based RL in two folds: 1) It utilizes a temporally consistent prototypical regularizer that encourages the prototype assignments produced for different time parts of the same latent trajectory to be temporally consistent instead of comparing the features; 2) A context representation is designed which combines both the projection embedding of latent states and aggregated prototypes and can significantly improve the dynamics generalization ability. Extensive experiments show that ProtoCAD surpasses existing methods in terms of dynamics generalization. Compared with the recurrent-based model RSSM, ProtoCAD delivers 13.2% and 26.7% better mean and median performance across all dynamics generalization tasks.
An Open Case-based Reasoning Framework for Personalized On-board Driving Assistance in Risk Scenarios
Nov 23, 2022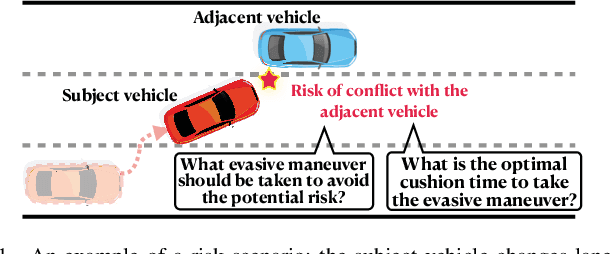
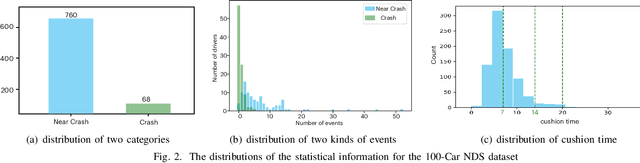
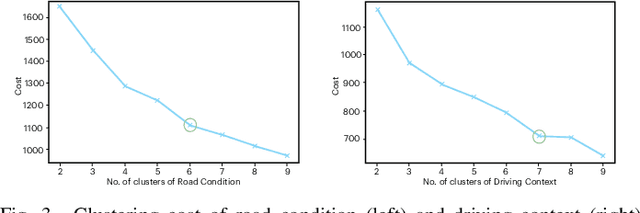
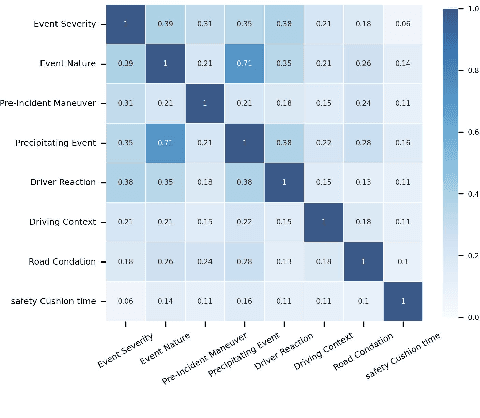
Driver reaction is of vital importance in risk scenarios. Drivers can take correct evasive maneuver at proper cushion time to avoid the potential traffic crashes, but this reaction process is highly experience-dependent and requires various levels of driving skills. To improve driving safety and avoid the traffic accidents, it is necessary to provide all road drivers with on-board driving assistance. This study explores the plausibility of case-based reasoning (CBR) as the inference paradigm underlying the choice of personalized crash evasive maneuvers and the cushion time, by leveraging the wealthy of human driving experience from the steady stream of traffic cases, which have been rarely explored in previous studies. To this end, in this paper, we propose an open evolving framework for generating personalized on-board driving assistance. In particular, we present the FFMTE model with high performance to model the traffic events and build the case database; A tailored CBR-based method is then proposed to retrieve, reuse and revise the existing cases to generate the assistance. We take the 100-Car Naturalistic Driving Study dataset as an example to build and test our framework; the experiments show reasonable results, providing the drivers with valuable evasive information to avoid the potential crashes in different scenarios.
Effects of Sim2Real Image Translation on Lane Keeping Assist System in CARLA Simulator
Nov 23, 2022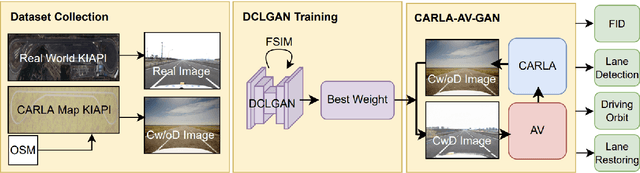
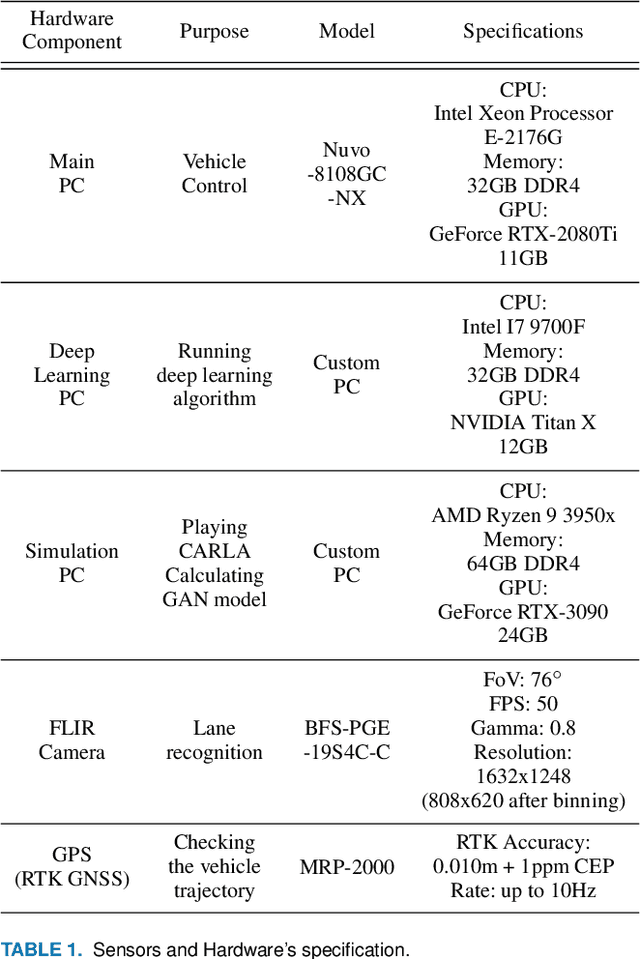
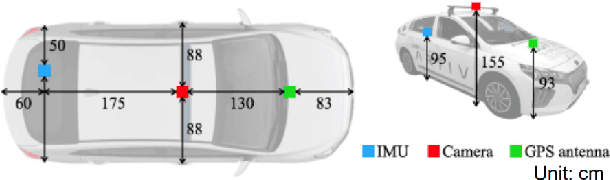
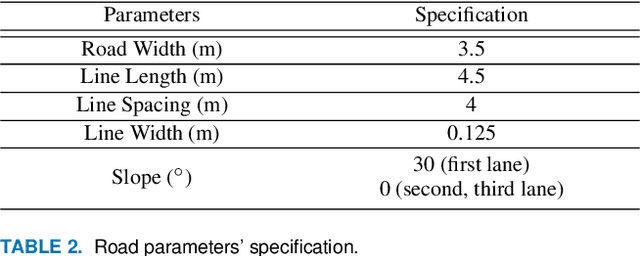
Autonomous vehicle simulation has the advantage of testing algorithms in various environment variables and scenarios without wasting time and resources, however, there is a visual gap with the real-world. In this paper, we trained DCLGAN to realistically convert the image of the CARLA simulator and evaluated the effect of the Sim2Real conversion focusing on the LKAS (Lane Keeping Assist System) algorithm. In order to avoid the case where the lane is translated distortedly by DCLGAN, we found the optimal training hyperparameter using FSIM (feature-similarity). After training, we built a system that connected the DCLGAN model with CARLA and AV in real-time. Then, we collected data (e.g. images, GPS) and analyzed them using the following four methods. First, image reality was measured with FID, which we verified quantitatively reflects the lane characteristics. CARLA images that passed through DCLGAN had smaller FID values than the original images. Second, lane segmentation accuracy through ENet-SAD was improved by DCLGAN. Third, in the curved route, the case of using DCLGAN drove closer to the center of the lane and had a high success rate. Lastly, in the straight route, DCLGAN improved lane restoring ability after deviating from the center of the lane as much as in reality.
Inversion of sea surface currents from satellite-derived SST-SSH synergies with 4DVarNets
Nov 23, 2022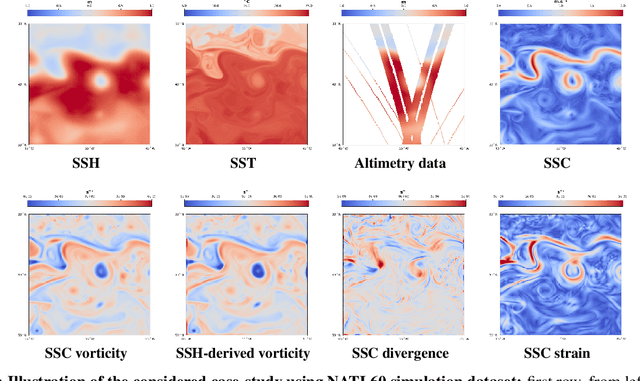
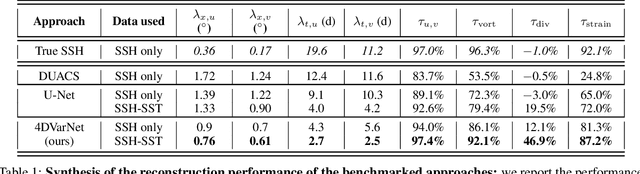
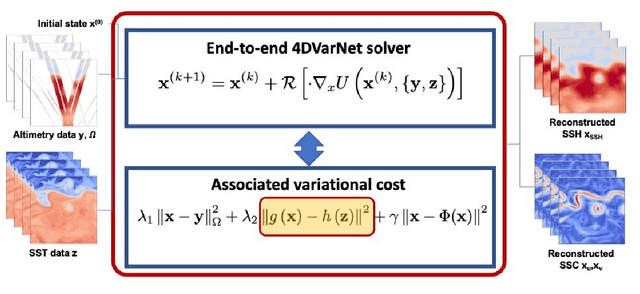
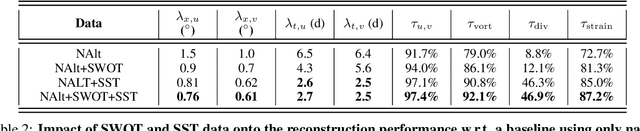
Satellite altimetry is a unique way for direct observations of sea surface dynamics. This is however limited to the surface-constrained geostrophic component of sea surface velocities. Ageostrophic dynamics are however expected to be significant for horizontal scales below 100~km and time scale below 10~days. The assimilation of ocean general circulation models likely reveals only a fraction of this ageostrophic component. Here, we explore a learning-based scheme to better exploit the synergies between the observed sea surface tracers, especially sea surface height (SSH) and sea surface temperature (SST), to better inform sea surface currents. More specifically, we develop a 4DVarNet scheme which exploits a variational data assimilation formulation with trainable observations and {\em a priori} terms. An Observing System Simulation Experiment (OSSE) in a region of the Gulf Stream suggests that SST-SSH synergies could reveal sea surface velocities for time scales of 2.5-3.0 days and horizontal scales of 0.5$^\circ$-0.7$^\circ$, including a significant fraction of the ageostrophic dynamics ($\approx$ 47\%). The analysis of the contribution of different observation data, namely nadir along-track altimetry, wide-swath SWOT altimetry and SST data, emphasizes the role of SST features for the reconstruction at horizontal spatial scales ranging from \nicefrac{1}{20}$^\circ$ to \nicefrac{1}{4}$^\circ$.
Actively Learning Costly Reward Functions for Reinforcement Learning
Nov 23, 2022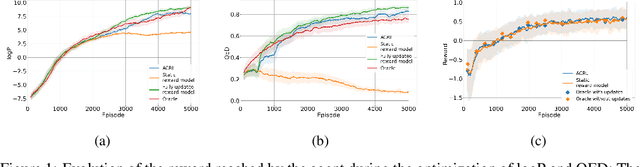
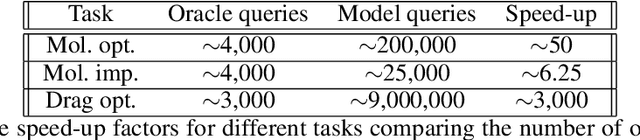
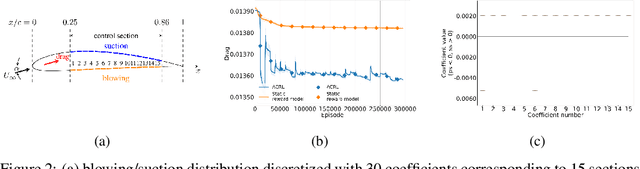
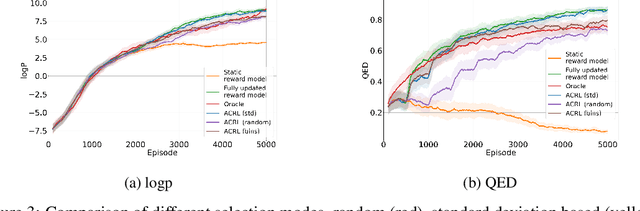
Transfer of recent advances in deep reinforcement learning to real-world applications is hindered by high data demands and thus low efficiency and scalability. Through independent improvements of components such as replay buffers or more stable learning algorithms, and through massively distributed systems, training time could be reduced from several days to several hours for standard benchmark tasks. However, while rewards in simulated environments are well-defined and easy to compute, reward evaluation becomes the bottleneck in many real-world environments, e.g., in molecular optimization tasks, where computationally demanding simulations or even experiments are required to evaluate states and to quantify rewards. Therefore, training might become prohibitively expensive without an extensive amount of computational resources and time. We propose to alleviate this problem by replacing costly ground-truth rewards with rewards modeled by neural networks, counteracting non-stationarity of state and reward distributions during training with an active learning component. We demonstrate that using our proposed ACRL method (Actively learning Costly rewards for Reinforcement Learning), it is possible to train agents in complex real-world environments orders of magnitudes faster. By enabling the application of reinforcement learning methods to new domains, we show that we can find interesting and non-trivial solutions to real-world optimization problems in chemistry, materials science and engineering.
Connected Cruise and Traffic Control for Pairs of Connected Automated Vehicles
Dec 04, 2022
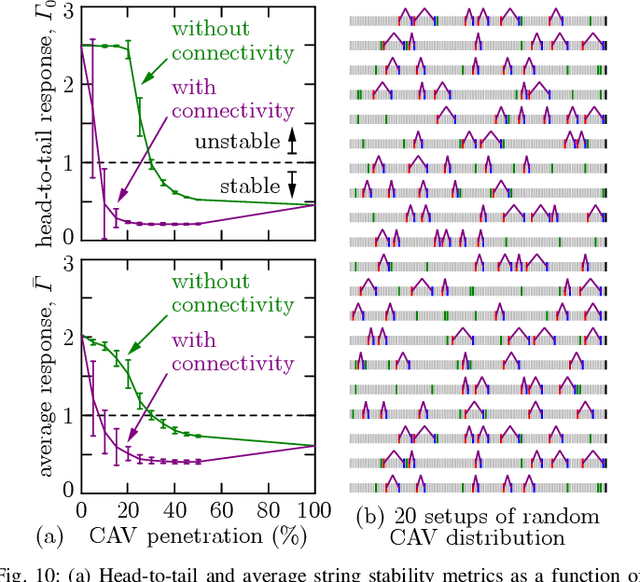
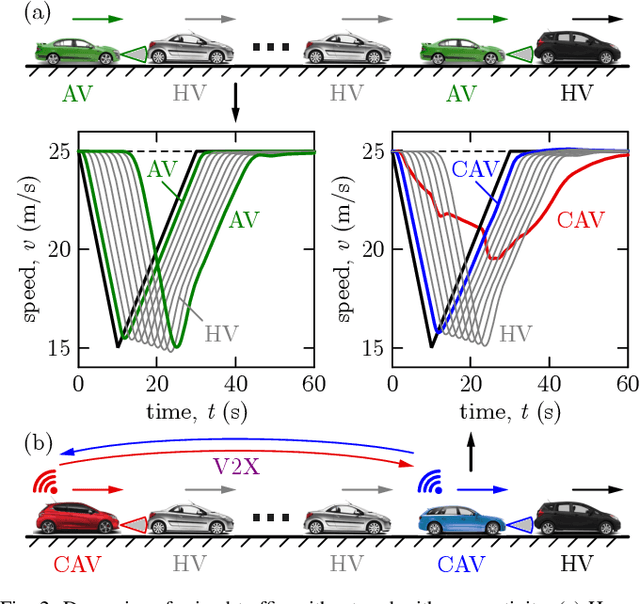
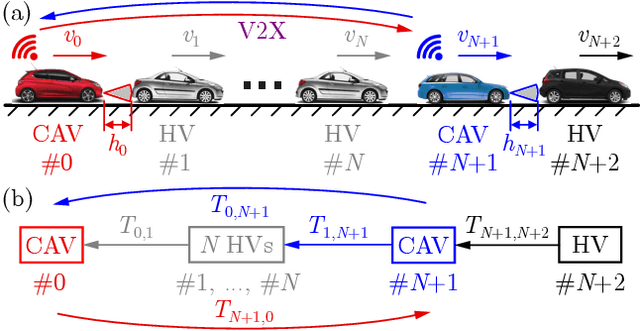
This paper considers mixed traffic consisting of connected automated vehicles equipped with vehicle-to-everything (V2X) connectivity and human-driven vehicles. A control strategy is proposed for communicating pairs of connected automated vehicles, where the two vehicles regulate their longitudinal motion by responding to each other, and, at the same time, stabilize the human-driven traffic between them. Stability analysis is conducted to find stabilizing controllers, and simulations are used to show the efficacy of the proposed approach. The impact of the penetration of connectivity and automation on the string stability of traffic is quantified. It is shown that, even with moderate penetration, connected automated vehicle pairs executing the proposed controllers achieve significant benefits compared to when these vehicles are disconnected and controlled independently.
CoNFies: Controllable Neural Face Avatars
Nov 16, 2022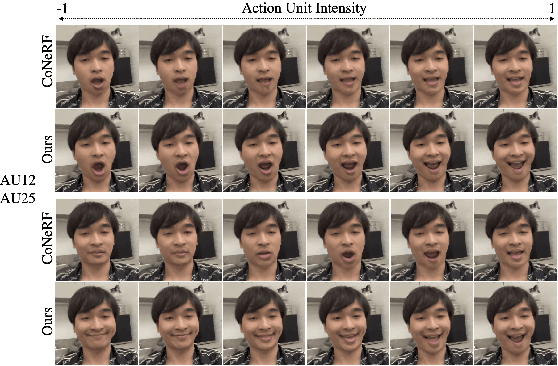
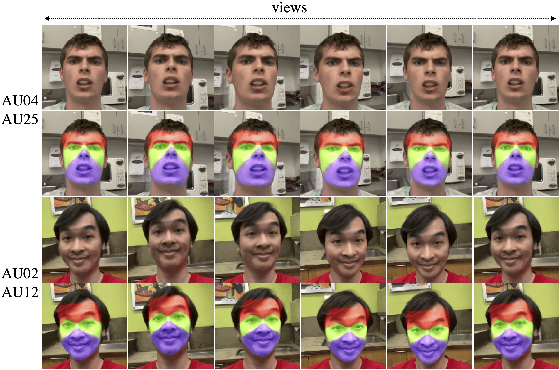
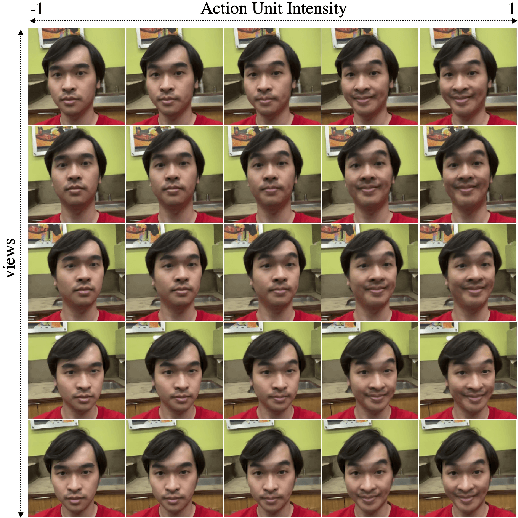
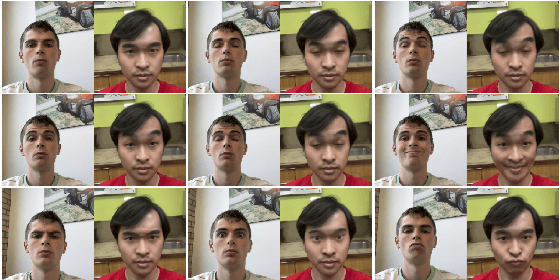
Neural Radiance Fields (NeRF) are compelling techniques for modeling dynamic 3D scenes from 2D image collections. These volumetric representations would be well suited for synthesizing novel facial expressions but for two problems. First, deformable NeRFs are object agnostic and model holistic movement of the scene: they can replay how the motion changes over time, but they cannot alter it in an interpretable way. Second, controllable volumetric representations typically require either time-consuming manual annotations or 3D supervision to provide semantic meaning to the scene. We propose a controllable neural representation for face self-portraits (CoNFies), that solves both of these problems within a common framework, and it can rely on automated processing. We use automated facial action recognition (AFAR) to characterize facial expressions as a combination of action units (AU) and their intensities. AUs provide both the semantic locations and control labels for the system. CoNFies outperformed competing methods for novel view and expression synthesis in terms of visual and anatomic fidelity of expressions.