 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRainSD: Rain Style Diversification Module for Image Synthesis Enhancement using Feature-Level Style Distribution
Dec 31, 2023



Autonomous driving technology nowadays targets to level 4 or beyond, but the researchers are faced with some limitations for developing reliable driving algorithms in diverse challenges. To promote the autonomous vehicles to spread widely, it is important to address safety issues on this technology. Among various safety concerns, the sensor blockage problem by severe weather conditions can be one of the most frequent threats for multi-task learning based perception algorithms during autonomous driving. To handle this problem, the importance of the generation of proper datasets is becoming more significant. In this paper, a synthetic road dataset with sensor blockage generated from real road dataset BDD100K is suggested in the format of BDD100K annotation. Rain streaks for each frame were made by an experimentally established equation and translated utilizing the image-to-image translation network based on style transfer. Using this dataset, the degradation of the diverse multi-task networks for autonomous driving, such as lane detection, driving area segmentation, and traffic object detection, has been thoroughly evaluated and analyzed. The tendency of the performance degradation of deep neural network-based perception systems for autonomous vehicle has been analyzed in depth. Finally, we discuss the limitation and the future directions of the deep neural network-based perception algorithms and autonomous driving dataset generation based on image-to-image translation.
Integrated Path Tracking with DYC and MPC using LSTM Based Tire Force Estimator for Four-wheel Independent Steering and Driving Vehicle
Dec 13, 2023



Active collision avoidance system plays a crucial role in ensuring the lateral safety of autonomous vehicles, and it is primarily related to path planning and tracking control algorithms. In particular, the direct yaw-moment control (DYC) system can significantly improve the lateral stability of a vehicle in environments with sudden changes in road conditions. In order to apply the DYC algorithm, it is very important to accurately consider the properties of tire forces with complex nonlinearity for control to ensure the lateral stability of the vehicle. In this study, longitudinal and lateral tire forces for safety path tracking were simultaneously estimated using a long short-term memory (LSTM) neural network based estimator. Furthermore, to improve path tracking performance in case of sudden changes in road conditions, a system has been developed by combining 4-wheel independent steering (4WIS) model predictive control (MPC) and 4-wheel independent drive (4WID) direct yaw-moment control (DYC). The estimation performance of the extended Kalman filter (EKF), which are commonly used for tire force estimation, was compared. In addition, the estimated longitudinal and lateral tire forces of each wheel were applied to the proposed system, and system verification was performed through simulation using a vehicle dynamics simulator. Consequently, the proposed method, the integrated path tracking algorithm with DYC and MPC using the LSTM based estimator, was validated to significantly improve the vehicle stability in suddenly changing road conditions.
A Study on Quantifying Sim2Real Image Gap in Autonomous Driving Simulations Using Lane Segmentation Attention Map Similarity
Jun 18, 2023



Autonomous driving simulations require highly realistic images. Our preliminary study found that when the CARLA Simulator image was made more like reality by using DCLGAN, the performance of the lane recognition model improved to levels comparable to real-world driving. It was also confirmed that the vehicle's ability to return to the center of the lane after deviating from it improved significantly. However, there is currently no agreed-upon metric for quantitatively evaluating the realism of simulation images. To address this issue, based on the idea that FID (Fr\'echet Inception Distance) measures the feature vector distribution distance using a pre-trained model, this paper proposes a metric that measures the similarity of simulation road images using the attention map from the self-attention distillation process of ENet-SAD. Finally, this paper verified the suitability of the measurement method by applying it to the image of the CARLA map that implemented a realworld autonomous driving test road.
Effects of Sim2Real Image Translation on Lane Keeping Assist System in CARLA Simulator
Nov 23, 2022Autonomous vehicle simulation has the advantage of testing algorithms in various environment variables and scenarios without wasting time and resources, however, there is a visual gap with the real-world. In this paper, we trained DCLGAN to realistically convert the image of the CARLA simulator and evaluated the effect of the Sim2Real conversion focusing on the LKAS (Lane Keeping Assist System) algorithm. In order to avoid the case where the lane is translated distortedly by DCLGAN, we found the optimal training hyperparameter using FSIM (feature-similarity). After training, we built a system that connected the DCLGAN model with CARLA and AV in real-time. Then, we collected data (e.g. images, GPS) and analyzed them using the following four methods. First, image reality was measured with FID, which we verified quantitatively reflects the lane characteristics. CARLA images that passed through DCLGAN had smaller FID values than the original images. Second, lane segmentation accuracy through ENet-SAD was improved by DCLGAN. Third, in the curved route, the case of using DCLGAN drove closer to the center of the lane and had a high success rate. Lastly, in the straight route, DCLGAN improved lane restoring ability after deviating from the center of the lane as much as in reality.
Hybrid tracker based optimal path tracking system for complex road environments for autonomous driving
Apr 29, 2021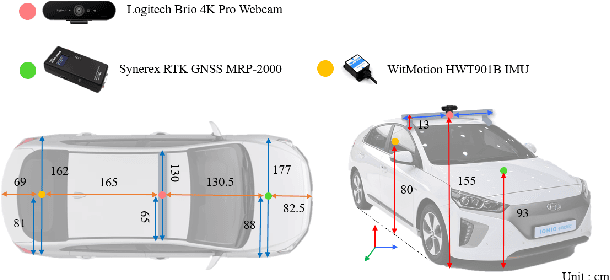

Path tracking system plays a key technology in autonomous driving. The system should be driven accurately along the lane and be careful not to cause any inconvenience to passengers. To address such tasks, this paper proposes hybrid tracker based optimal path tracking system. By applying a deep learning based lane detection algorithm and a designated fast lane fitting algorithm, this paper developed a lane processing algorithm that shows a match rate with actual lanes with minimal computational cost. In addition, three modified path tracking algorithms were designed using the GPS based path or the vision based path. In the driving system, a match rate for the correct ideal path does not necessarily represent driving stability. This paper proposes hybrid tracker based optimal path tracking system by applying the concept of an observer that selects the optimal tracker appropriately in complex road environments. The driving stability has been studied in complex road environments such as straight road with multiple 3-way junctions, roundabouts, intersections, and tunnels. Consequently, the proposed system experimentally showed the high performance with consistent driving comfort by maintaining the vehicle within the lanes accurately even in the presence of high complexity of road conditions. Code will be available in https://github.com/DGIST-ARTIV.
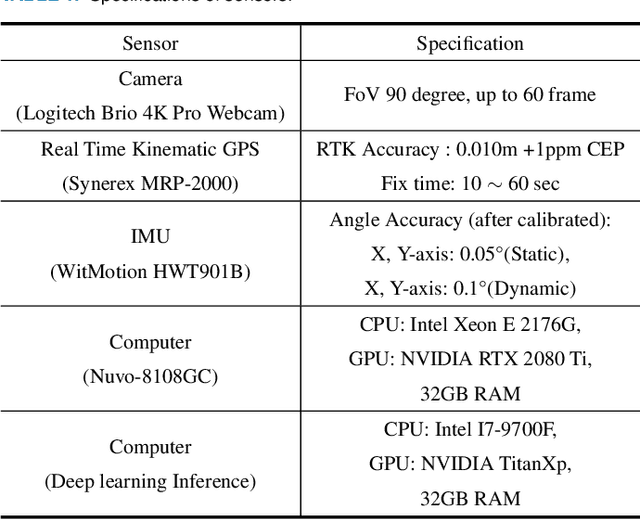
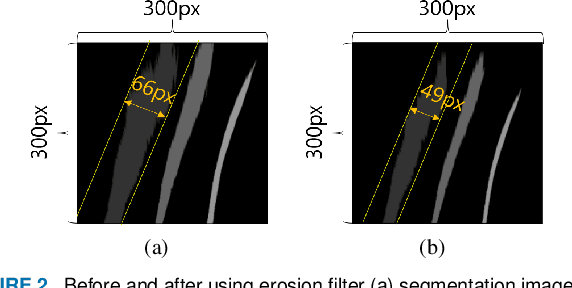
Estimation of Closest In-Path Vehicle by Low-Channel LiDAR and Camera Sensor Fusion for Autonomous Vehicle
Mar 25, 2021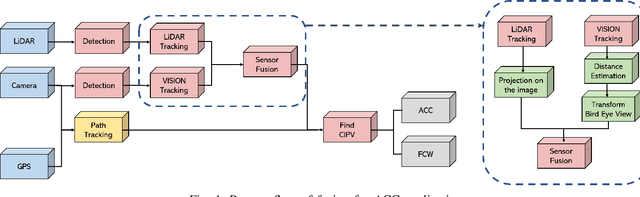
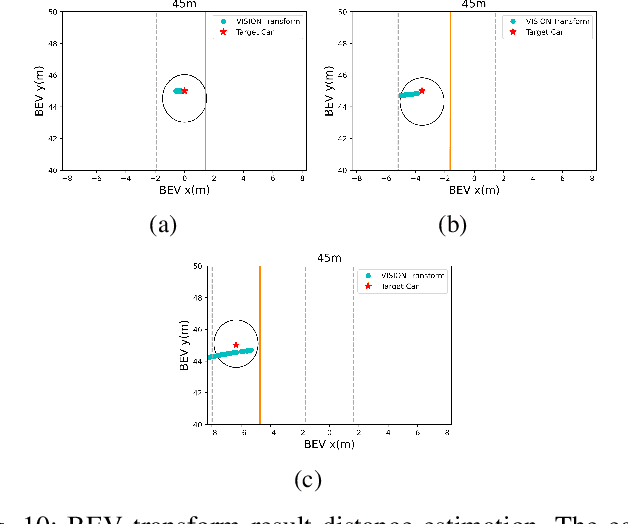
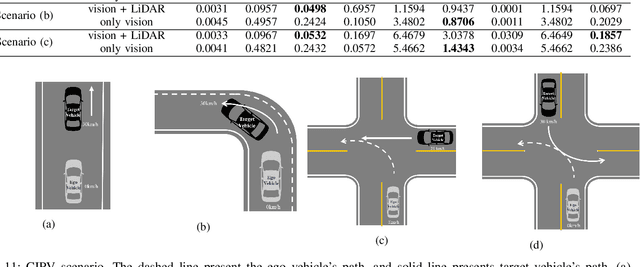
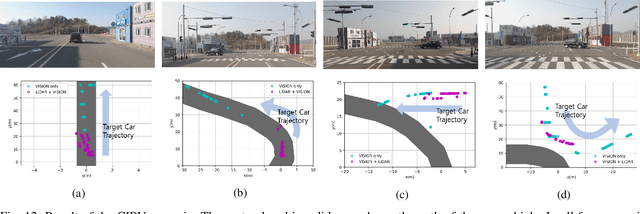
In autonomous driving, using a variety of sensors to recognize preceding vehicles in middle and long distance is helpful for improving driving performance and developing various functions. However, if only LiDAR or camera is used in the recognition stage, it is difficult to obtain necessary data due to the limitations of each sensor. In this paper, we proposed a method of converting the tracking data of vision into bird's eye view (BEV) coordinates using an equation that projects LiDAR points onto an image, and a method of fusion between LiDAR and vision tracked data. Thus, the newly proposed method was effective through the results of detecting closest in-path vehicle (CIPV) in various situations. In addition, even when experimenting with the EuroNCAP autonomous emergency braking (AEB) test protocol using the result of fusion, AEB performance is improved through improved cognitive performance than when using only LiDAR. In experimental results, the performance of the proposed method was proved through actual vehicle tests in various scenarios. Consequently, it is convincing that the newly proposed sensor fusion method significantly improves the ACC function in autonomous maneuvering. We expect that this improvement in perception performance will contribute to improving the overall stability of ACC.