 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Learning Snippet-to-Motion Progression for Skeleton-based Human Motion Prediction
Jul 26, 2023
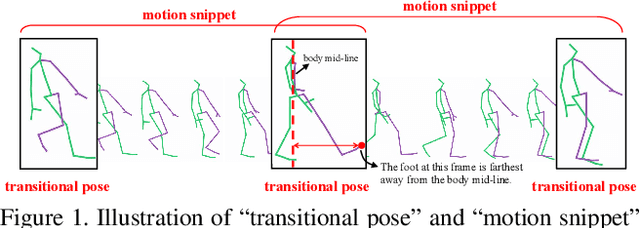
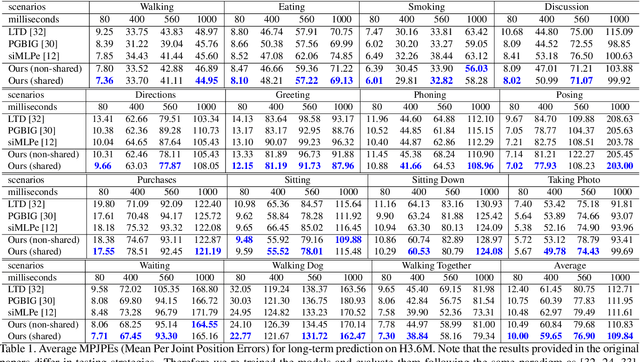
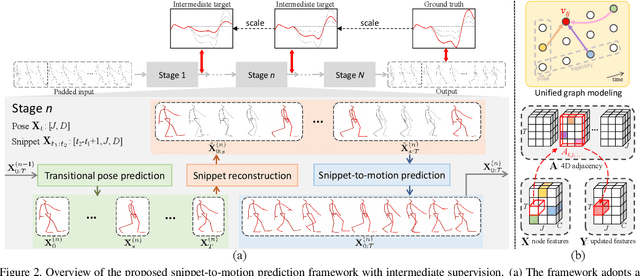
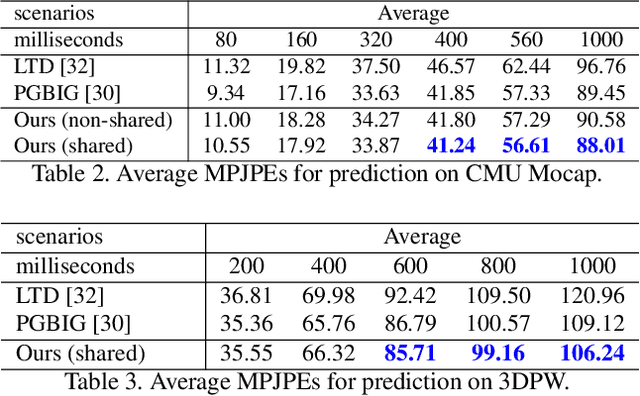
Existing Graph Convolutional Networks to achieve human motion prediction largely adopt a one-step scheme, which output the prediction straight from history input, failing to exploit human motion patterns. We observe that human motions have transitional patterns and can be split into snippets representative of each transition. Each snippet can be reconstructed from its starting and ending poses referred to as the transitional poses. We propose a snippet-to-motion multi-stage framework that breaks motion prediction into sub-tasks easier to accomplish. Each sub-task integrates three modules: transitional pose prediction, snippet reconstruction, and snippet-to-motion prediction. Specifically, we propose to first predict only the transitional poses. Then we use them to reconstruct the corresponding snippets, obtaining a close approximation to the true motion sequence. Finally we refine them to produce the final prediction output. To implement the network, we propose a novel unified graph modeling, which allows for direct and effective feature propagation compared to existing approaches which rely on separate space-time modeling. Extensive experiments on Human 3.6M, CMU Mocap and 3DPW datasets verify the effectiveness of our method which achieves state-of-the-art performance.
Artifact Restoration in Histology Images with Diffusion Probabilistic Models
Jul 26, 2023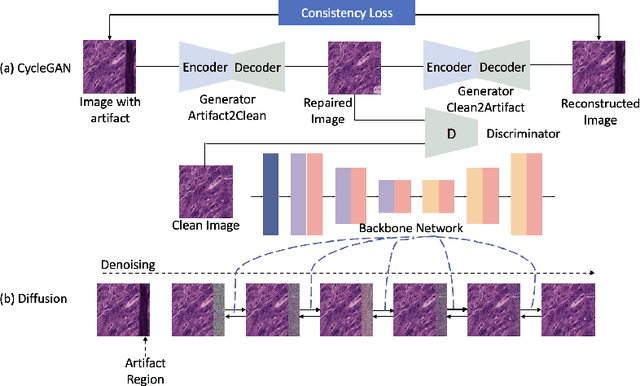
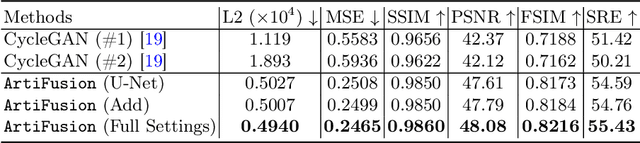
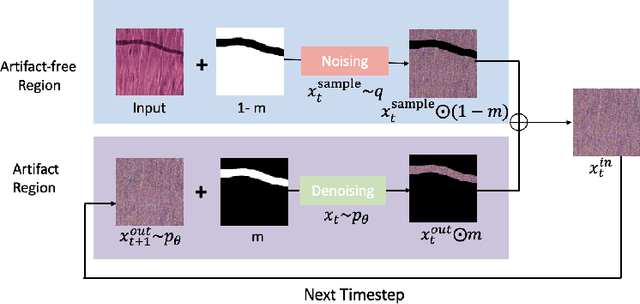
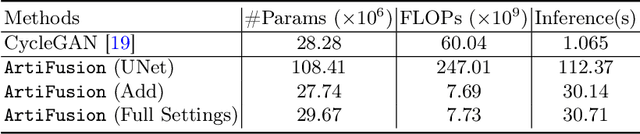
Histological whole slide images (WSIs) can be usually compromised by artifacts, such as tissue folding and bubbles, which will increase the examination difficulty for both pathologists and Computer-Aided Diagnosis (CAD) systems. Existing approaches to restoring artifact images are confined to Generative Adversarial Networks (GANs), where the restoration process is formulated as an image-to-image transfer. Those methods are prone to suffer from mode collapse and unexpected mistransfer in the stain style, leading to unsatisfied and unrealistic restored images. Innovatively, we make the first attempt at a denoising diffusion probabilistic model for histological artifact restoration, namely ArtiFusion.Specifically, ArtiFusion formulates the artifact region restoration as a gradual denoising process, and its training relies solely on artifact-free images to simplify the training complexity.Furthermore, to capture local-global correlations in the regional artifact restoration, a novel Swin-Transformer denoising architecture is designed, along with a time token scheme. Our extensive evaluations demonstrate the effectiveness of ArtiFusion as a pre-processing method for histology analysis, which can successfully preserve the tissue structures and stain style in artifact-free regions during the restoration. Code is available at https://github.com/zhenqi-he/ArtiFusion.
Uncertainty Guided Adaptive Warping for Robust and Efficient Stereo Matching
Jul 26, 2023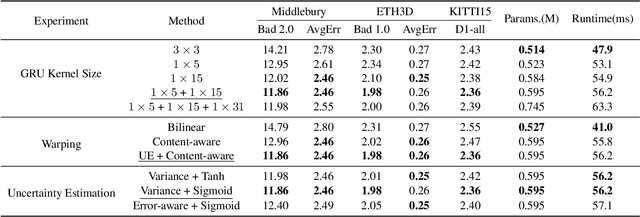
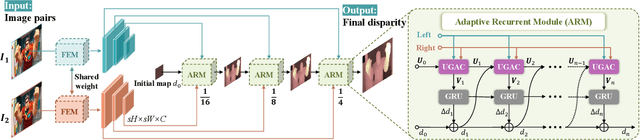
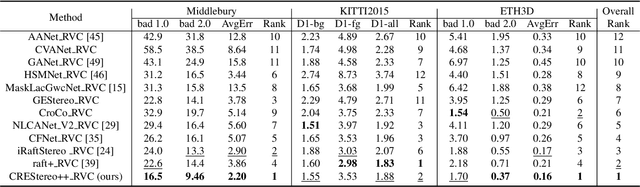
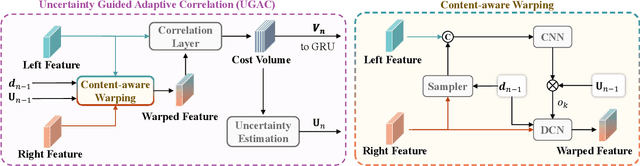
Correlation based stereo matching has achieved outstanding performance, which pursues cost volume between two feature maps. Unfortunately, current methods with a fixed model do not work uniformly well across various datasets, greatly limiting their real-world applicability. To tackle this issue, this paper proposes a new perspective to dynamically calculate correlation for robust stereo matching. A novel Uncertainty Guided Adaptive Correlation (UGAC) module is introduced to robustly adapt the same model for different scenarios. Specifically, a variance-based uncertainty estimation is employed to adaptively adjust the sampling area during warping operation. Additionally, we improve the traditional non-parametric warping with learnable parameters, such that the position-specific weights can be learned. We show that by empowering the recurrent network with the UGAC module, stereo matching can be exploited more robustly and effectively. Extensive experiments demonstrate that our method achieves state-of-the-art performance over the ETH3D, KITTI, and Middlebury datasets when employing the same fixed model over these datasets without any retraining procedure. To target real-time applications, we further design a lightweight model based on UGAC, which also outperforms other methods over KITTI benchmarks with only 0.6 M parameters.
A Vision for Cleaner Rivers: Harnessing Snapshot Hyperspectral Imaging to Detect Macro-Plastic Litter
Jul 22, 2023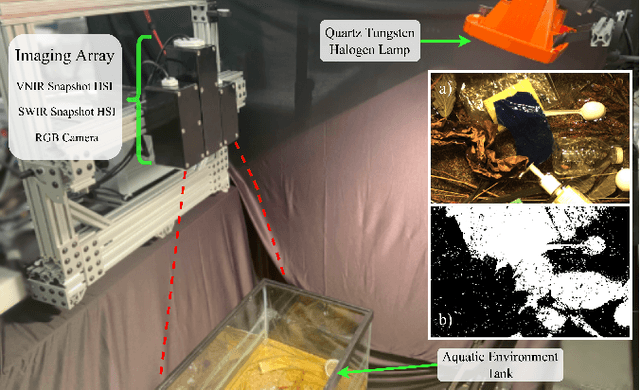
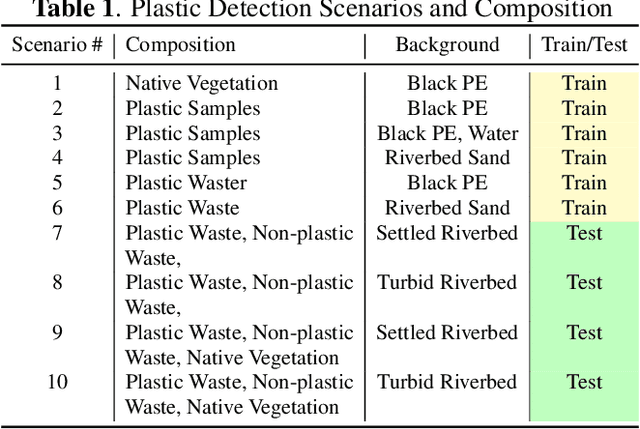
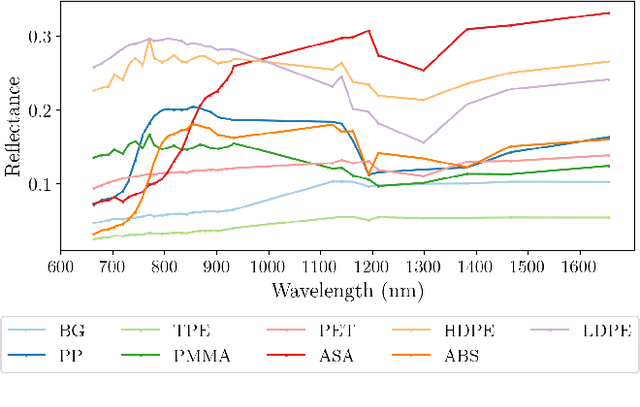
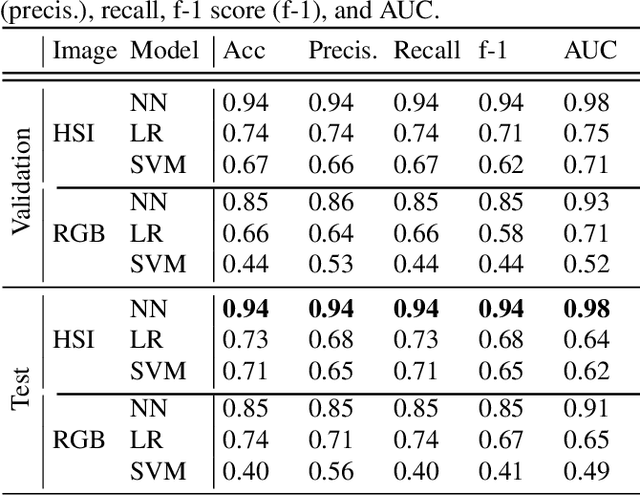
Plastic waste entering the riverine harms local ecosystems leading to negative ecological and economic impacts. Large parcels of plastic waste are transported from inland to oceans leading to a global scale problem of floating debris fields. In this context, efficient and automatized monitoring of mismanaged plastic waste is paramount. To address this problem, we analyze the feasibility of macro-plastic litter detection using computational imaging approaches in river-like scenarios. We enable near-real-time tracking of partially submerged plastics by using snapshot Visible-Shortwave Infrared hyperspectral imaging. Our experiments indicate that imaging strategies associated with machine learning classification approaches can lead to high detection accuracy even in challenging scenarios, especially when leveraging hyperspectral data and nonlinear classifiers. All code, data, and models are available online: https://github.com/RIVeR-Lab/hyperspectral_macro_plastic_detection.
Assessing the Impact of Context Inference Error and Partial Observability on RL Methods for Just-In-Time Adaptive Interventions
May 17, 2023
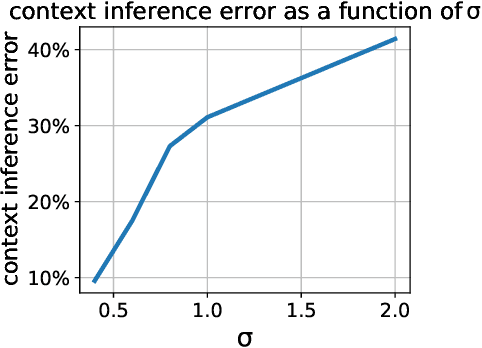
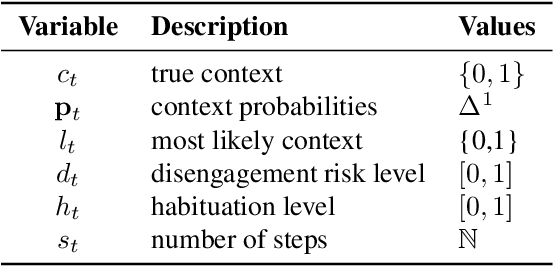
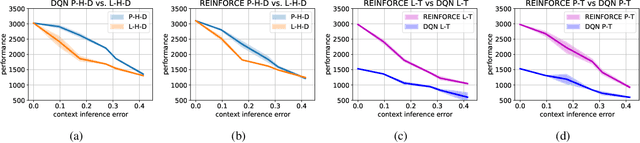
Just-in-Time Adaptive Interventions (JITAIs) are a class of personalized health interventions developed within the behavioral science community. JITAIs aim to provide the right type and amount of support by iteratively selecting a sequence of intervention options from a pre-defined set of components in response to each individual's time varying state. In this work, we explore the application of reinforcement learning methods to the problem of learning intervention option selection policies. We study the effect of context inference error and partial observability on the ability to learn effective policies. Our results show that the propagation of uncertainty from context inferences is critical to improving intervention efficacy as context uncertainty increases, while policy gradient algorithms can provide remarkable robustness to partially observed behavioral state information.
Multiscale Representation for Real-Time Anti-Aliasing Neural Rendering
Apr 20, 2023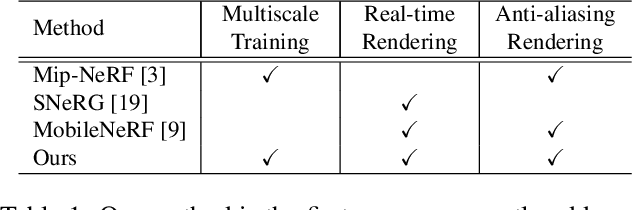
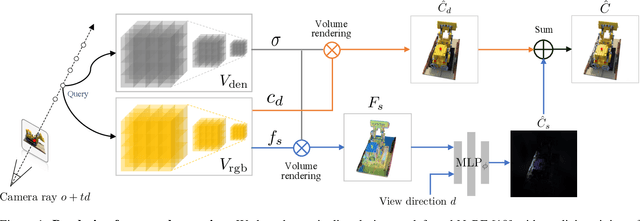
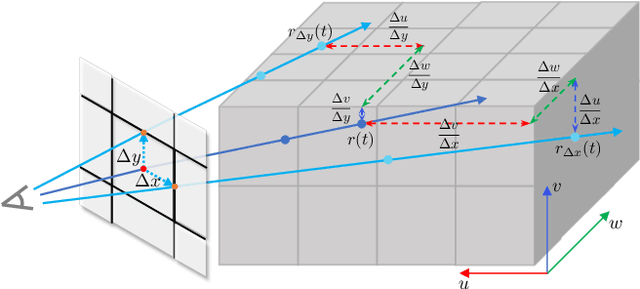

The rendering scheme in neural radiance field (NeRF) is effective in rendering a pixel by casting a ray into the scene. However, NeRF yields blurred rendering results when the training images are captured at non-uniform scales, and produces aliasing artifacts if the test images are taken in distant views. To address this issue, Mip-NeRF proposes a multiscale representation as a conical frustum to encode scale information. Nevertheless, this approach is only suitable for offline rendering since it relies on integrated positional encoding (IPE) to query a multilayer perceptron (MLP). To overcome this limitation, we propose mip voxel grids (Mip-VoG), an explicit multiscale representation with a deferred architecture for real-time anti-aliasing rendering. Our approach includes a density Mip-VoG for scene geometry and a feature Mip-VoG with a small MLP for view-dependent color. Mip-VoG encodes scene scale using the level of detail (LOD) derived from ray differentials and uses quadrilinear interpolation to map a queried 3D location to its features and density from two neighboring downsampled voxel grids. To our knowledge, our approach is the first to offer multiscale training and real-time anti-aliasing rendering simultaneously. We conducted experiments on multiscale datasets, and the results show that our approach outperforms state-of-the-art real-time rendering baselines.
Quasi Real-Time Autonomous Satellite Detection and Orbit Estimation
Apr 13, 2023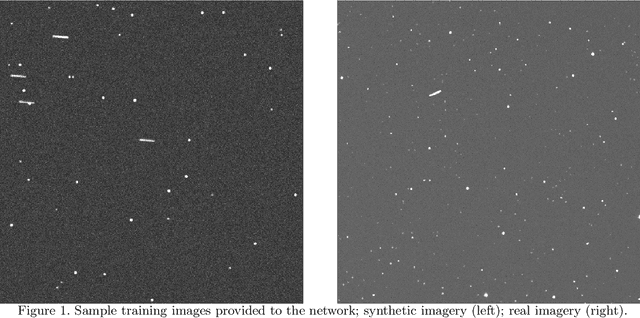
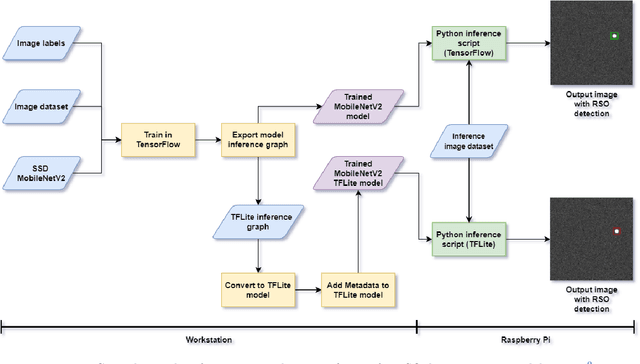
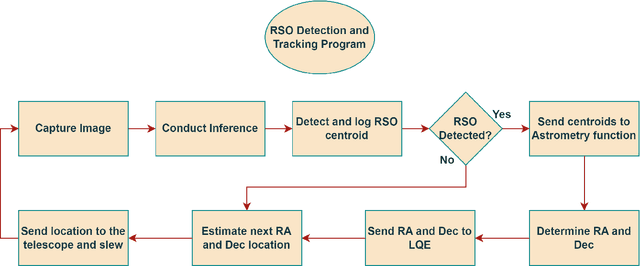
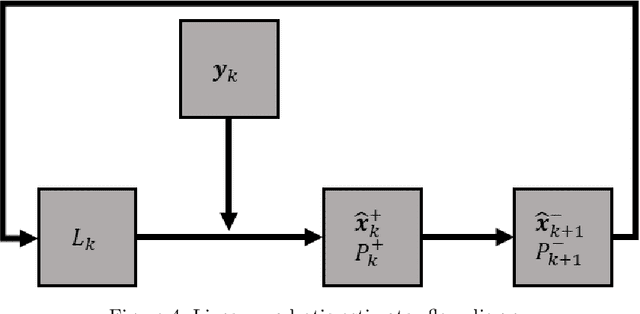
A method of near real-time detection and tracking of resident space objects (RSOs) using a convolutional neural network (CNN) and linear quadratic estimator (LQE) is proposed. Advances in machine learning architecture allow the use of low-power/cost embedded devices to perform complex classification tasks. In order to reduce the costs of tracking systems, a low-cost embedded device will be used to run a CNN detection model for RSOs in unresolved images captured by a gray-scale camera and small telescope. Detection results computed in near real-time are then passed to an LQE to compute tracking updates for the telescope mount, resulting in a fully autonomous method of optical RSO detection and tracking. Keywords: Space Domain Awareness, Neural Networks, Real-Time, Object Detection, Embedded Systems.
HEDI: First-Time Clinical Application and Results of a Biomechanical Evaluation and Visualisation Tool for Incisional Hernia Repair
Jul 04, 2023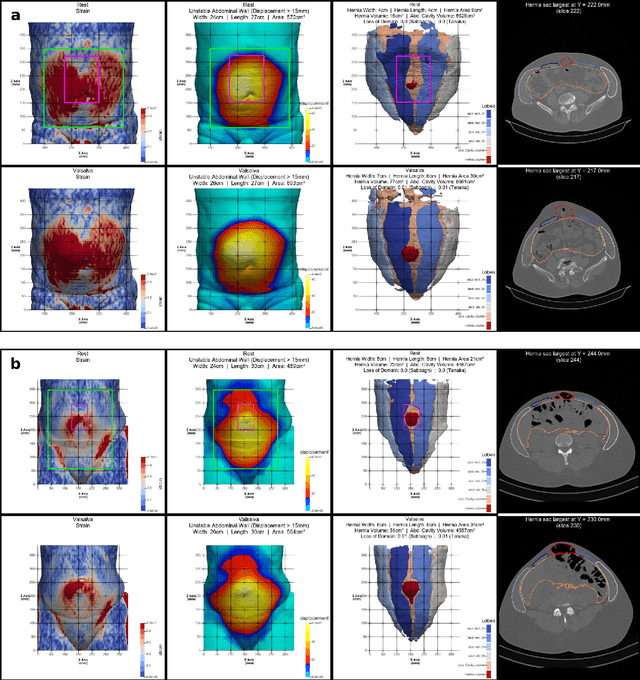
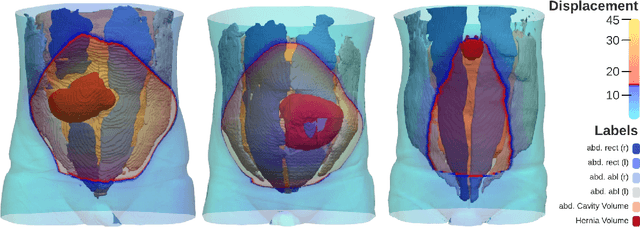
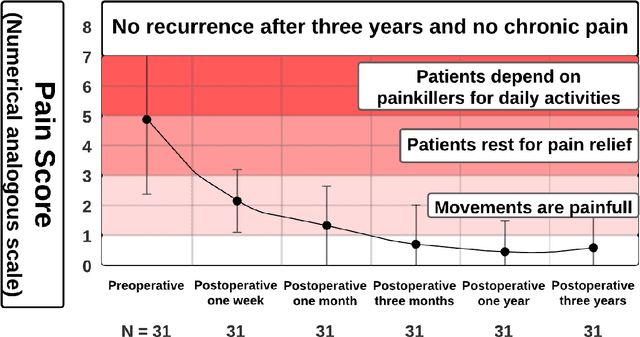
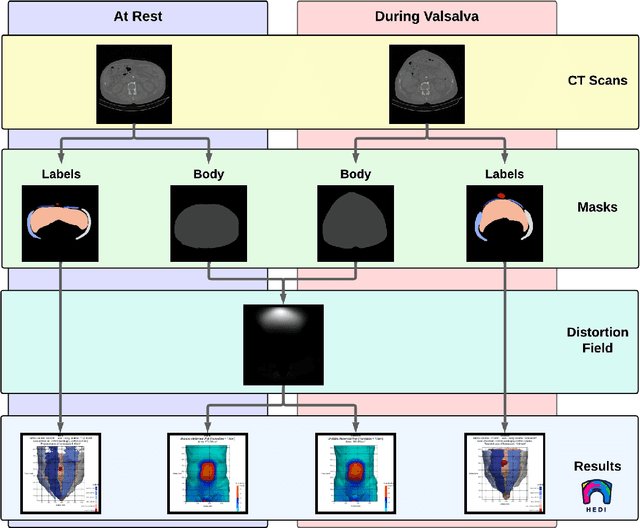
Abdominal wall defects often lead to pain, discomfort, and recurrence of incisional hernias, resulting in significant morbidity and repeated surgical repairs worldwide. Mesh repair for large hernias is usually based on the defect area with a fixed overlap, without considering biomechanical aspects such as muscle activation, intra-abdominal pressure, tissue elasticity, and abdominal wall distention. To address this issue, we present a biomechanical approach to incisional hernia repair that takes into account the unstable abdominal wall. Additionally, we introduce HEDI, a tool that uses dynamic computed tomography with Valsalva maneuver to automatically detect and assess hernia size, volume, and abdominal wall instability. Our first clinical application of HEDI in the preoperative evaluation of 31 patients shows significantly improved success rates compared to reported rates, with all patients remaining pain-free and showing no hernia recurrence after three years of follow-up.
FAIRO: Fairness-aware Adaptation in Sequential-Decision Making for Human-in-the-Loop Systems
Jul 12, 2023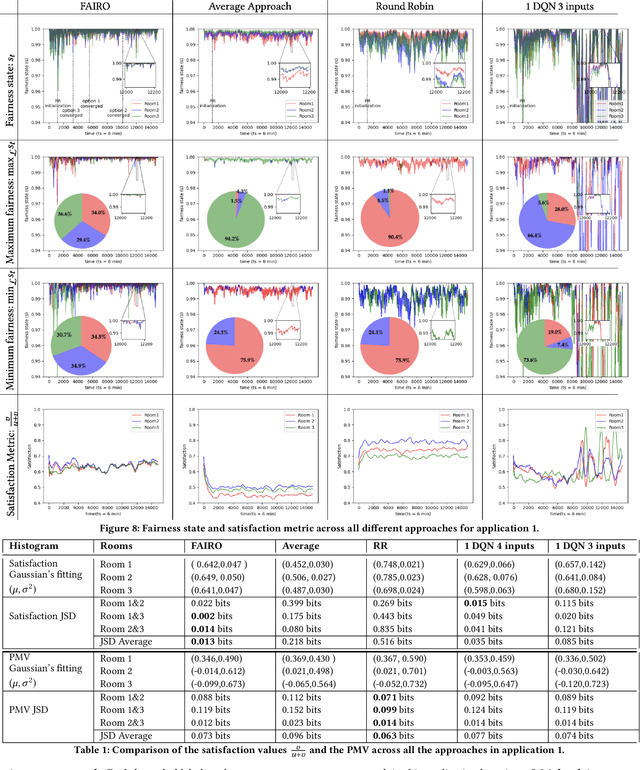
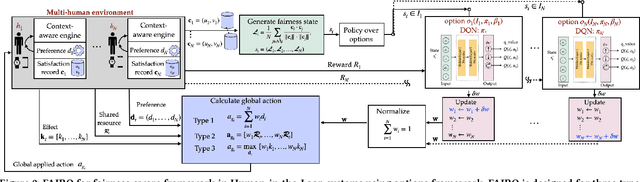
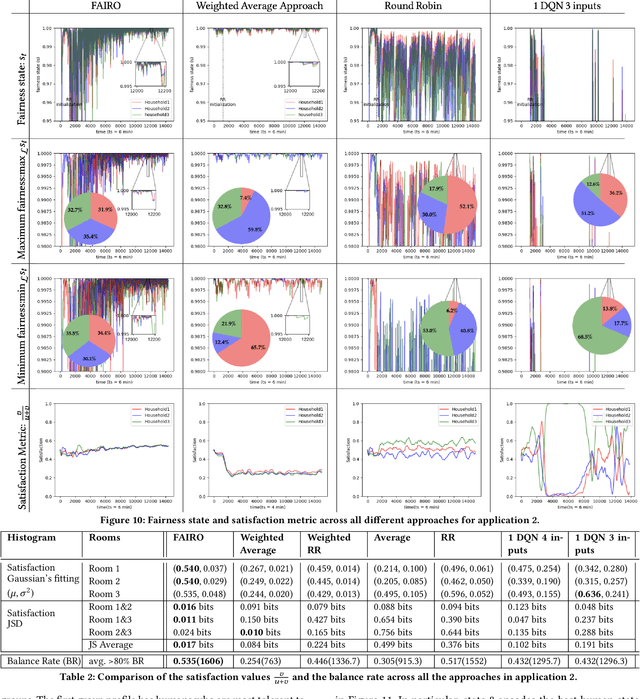
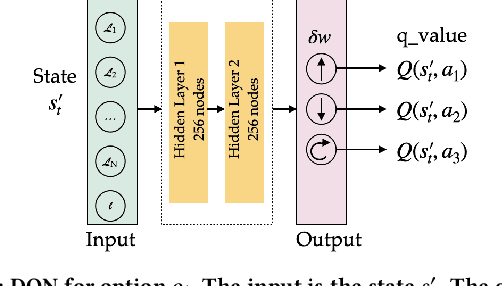
Achieving fairness in sequential-decision making systems within Human-in-the-Loop (HITL) environments is a critical concern, especially when multiple humans with different behavior and expectations are affected by the same adaptation decisions in the system. This human variability factor adds more complexity since policies deemed fair at one point in time may become discriminatory over time due to variations in human preferences resulting from inter- and intra-human variability. This paper addresses the fairness problem from an equity lens, considering human behavior variability, and the changes in human preferences over time. We propose FAIRO, a novel algorithm for fairness-aware sequential-decision making in HITL adaptation, which incorporates these notions into the decision-making process. In particular, FAIRO decomposes this complex fairness task into adaptive sub-tasks based on individual human preferences through leveraging the Options reinforcement learning framework. We design FAIRO to generalize to three types of HITL application setups that have the shared adaptation decision problem. Furthermore, we recognize that fairness-aware policies can sometimes conflict with the application's utility. To address this challenge, we provide a fairness-utility tradeoff in FAIRO, allowing system designers to balance the objectives of fairness and utility based on specific application requirements. Extensive evaluations of FAIRO on the three HITL applications demonstrate its generalizability and effectiveness in promoting fairness while accounting for human variability. On average, FAIRO can improve fairness compared with other methods across all three applications by 35.36%.
Comparing Apples to Apples: Generating Aspect-Aware Comparative Sentences from User Reviews
Jul 23, 2023It is time-consuming to find the best product among many similar alternatives. Comparative sentences can help to contrast one item from others in a way that highlights important features of an item that stand out. Given reviews of one or multiple items and relevant item features, we generate comparative review sentences to aid users to find the best fit. Specifically, our model consists of three successive components in a transformer: (i) an item encoding module to encode an item for comparison, (ii) a comparison generation module that generates comparative sentences in an autoregressive manner, (iii) a novel decoding method for user personalization. We show that our pipeline generates fluent and diverse comparative sentences. We run experiments on the relevance and fidelity of our generated sentences in a human evaluation study and find that our algorithm creates comparative review sentences that are relevant and truthful.