 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Information": models, code, and papers
Vocal Timbre Effects with Differentiable Digital Signal Processing
Jun 19, 2023
We explore two approaches to creatively altering vocal timbre using Differentiable Digital Signal Processing (DDSP). The first approach is inspired by classic cross-synthesis techniques. A pretrained DDSP decoder predicts a filter for a noise source and a harmonic distribution, based on pitch and loudness information extracted from the vocal input. Before synthesis, the harmonic distribution is modified by interpolating between the predicted distribution and the harmonics of the input. We provide a real-time implementation of this approach in the form of a Neutone model. In the second approach, autoencoder models are trained on datasets consisting of both vocal and instrument training data. To apply the effect, the trained autoencoder attempts to reconstruct the vocal input. We find that there is a desirable "sweet spot" during training, where the model has learned to reconstruct the phonetic content of the input vocals, but is still affected by the timbre of the instrument mixed into the training data. After further training, that effect disappears. A perceptual evaluation compares the two approaches. We find that the autoencoder in the second approach is able to reconstruct intelligible lyrical content without any explicit phonetic information provided during training.
Uncovering solutions from data corrupted by systematic errors: A physics-constrained convolutional neural network approach
Jun 19, 2023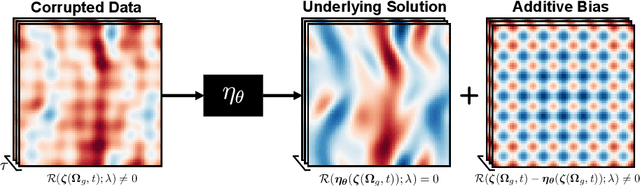
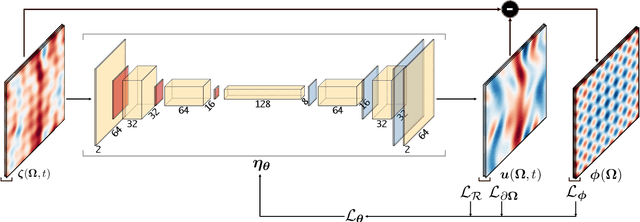
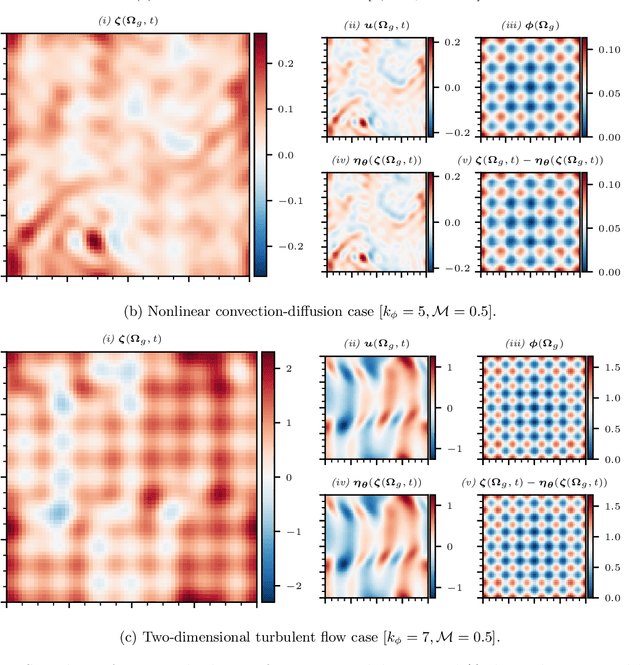
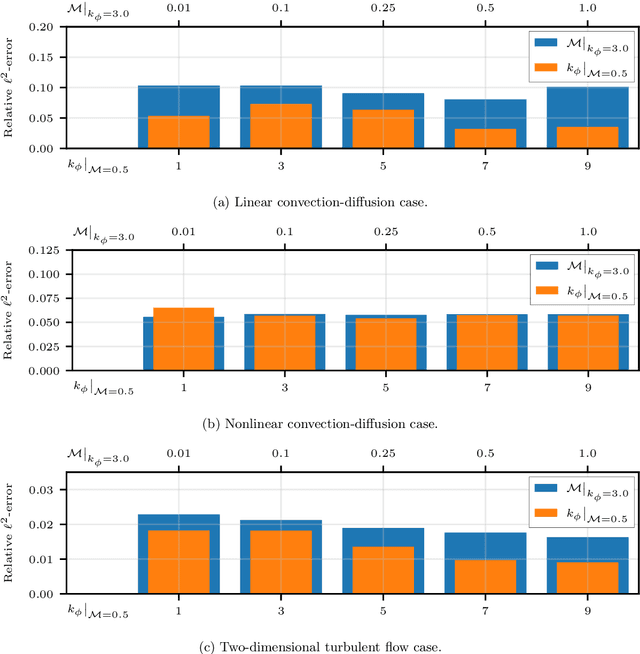
Information on natural phenomena and engineering systems is typically contained in data. Data can be corrupted by systematic errors in models and experiments. In this paper, we propose a tool to uncover the spatiotemporal solution of the underlying physical system by removing the systematic errors from data. The tool is the physics-constrained convolutional neural network (PC-CNN), which combines information from both the systems governing equations and data. We focus on fundamental phenomena that are modelled by partial differential equations, such as linear convection, Burgers equation, and two-dimensional turbulence. First, we formulate the problem, describe the physics-constrained convolutional neural network, and parameterise the systematic error. Second, we uncover the solutions from data corrupted by large multimodal systematic errors. Third, we perform a parametric study for different systematic errors. We show that the method is robust. Fourth, we analyse the physical properties of the uncovered solutions. We show that the solutions inferred from the PC-CNN are physical, in contrast to the data corrupted by systematic errors that does not fulfil the governing equations. This work opens opportunities for removing epistemic errors from models, and systematic errors from measurements.
Simple Steps to Success: Axiomatics of Distance-Based Algorithmic Recourse
Jun 27, 2023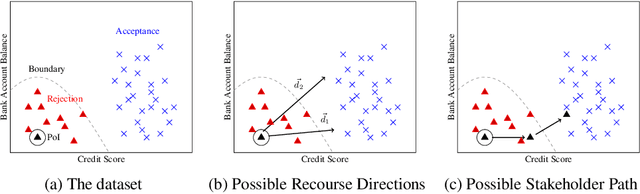
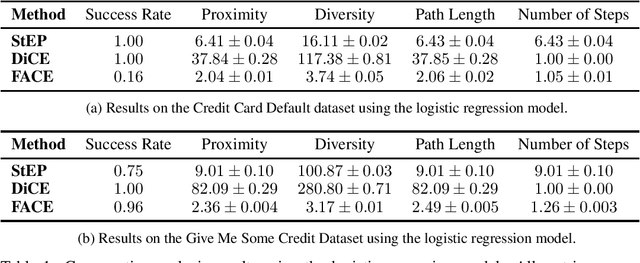
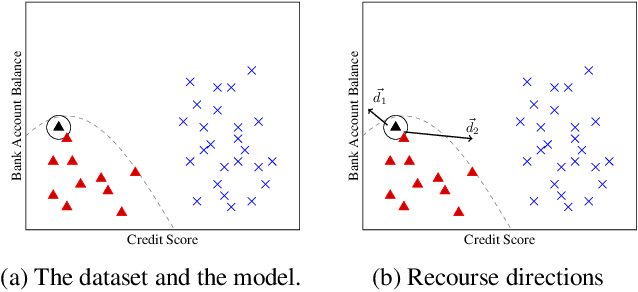
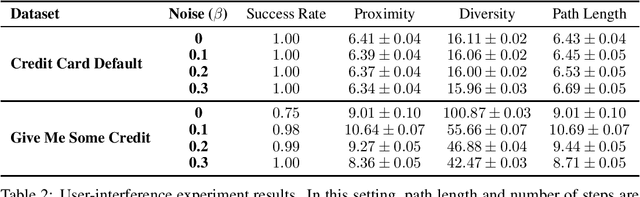
We propose a novel data-driven framework for algorithmic recourse that offers users interventions to change their predicted outcome. Existing approaches to compute recourse find a set of points that satisfy some desiderata -- e.g. an intervention in the underlying causal graph, or minimizing a cost function. Satisfying these criteria, however, requires extensive knowledge of the underlying model structure, often an unrealistic amount of information in several domains. We propose a data-driven, computationally efficient approach to computing algorithmic recourse. We do so by suggesting directions in the data manifold that users can take to change their predicted outcome. We present Stepwise Explainable Paths (StEP), an axiomatically justified framework to compute direction-based algorithmic recourse. We offer a thorough empirical and theoretical investigation of StEP. StEP offers provable privacy and robustness guarantees, and outperforms the state-of-the-art on several established recourse desiderata.
Gender Bias in BERT -- Measuring and Analysing Biases through Sentiment Rating in a Realistic Downstream Classification Task
Jun 27, 2023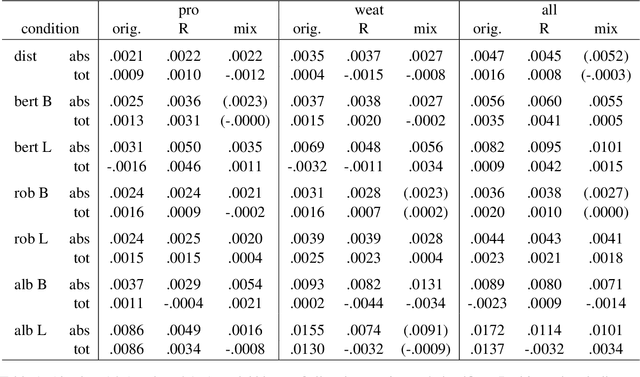

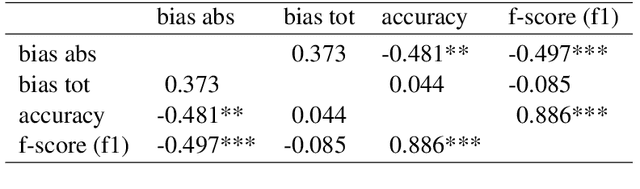
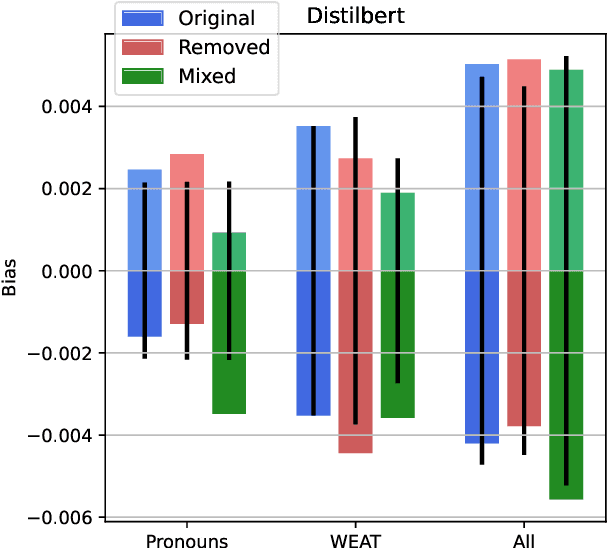
Pretrained language models are publicly available and constantly finetuned for various real-life applications. As they become capable of grasping complex contextual information, harmful biases are likely increasingly intertwined with those models. This paper analyses gender bias in BERT models with two main contributions: First, a novel bias measure is introduced, defining biases as the difference in sentiment valuation of female and male sample versions. Second, we comprehensively analyse BERT's biases on the example of a realistic IMDB movie classifier. By systematically varying elements of the training pipeline, we can conclude regarding their impact on the final model bias. Seven different public BERT models in nine training conditions, i.e. 63 models in total, are compared. Almost all conditions yield significant gender biases. Results indicate that reflected biases stem from public BERT models rather than task-specific data, emphasising the weight of responsible usage.
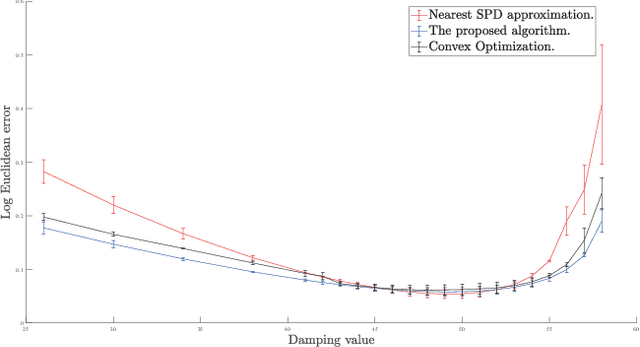
PMaF: Deep Declarative Layers for Principal Matrix Features
Jun 27, 2023
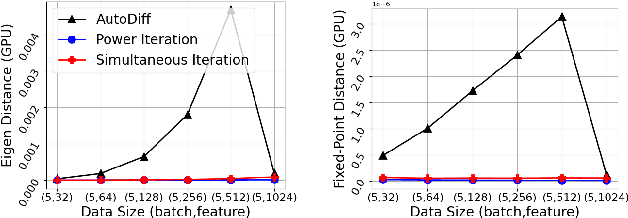
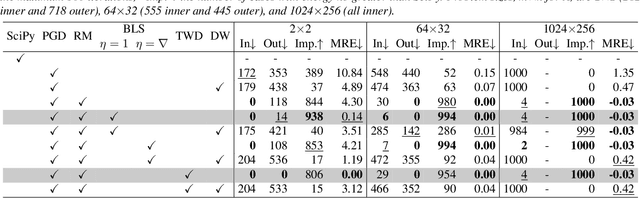
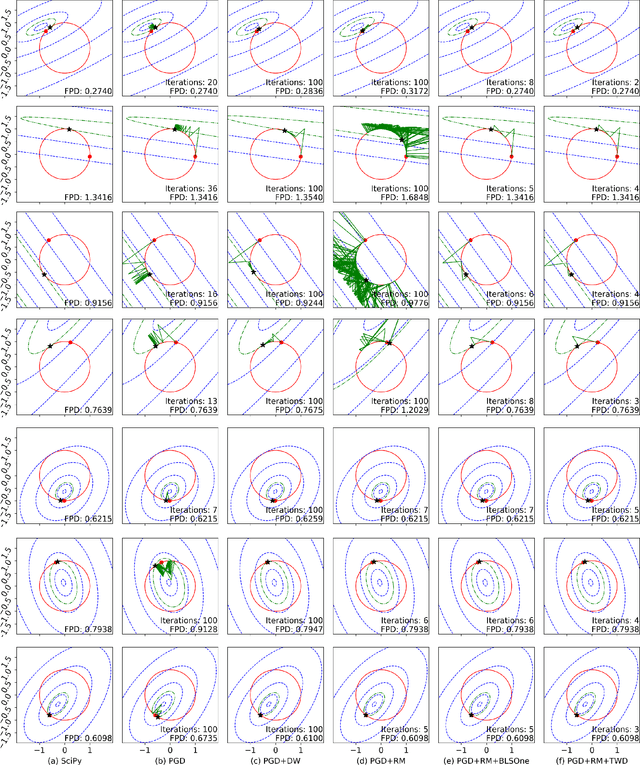
We explore two differentiable deep declarative layers, namely least squares on sphere (LESS) and implicit eigen decomposition (IED), for learning the principal matrix features (PMaF). This can be used to represent data features with a low-dimension vector containing dominant information from a high-dimension matrix. We first solve the problems with iterative optimization in the forward pass and then backpropagate the solution for implicit gradients under a bi-level optimization framework. Particularly, adaptive descent steps with the backtracking line search method and descent decay in the tangent space are studied to improve the forward pass efficiency of LESS. Meanwhile, exploited data structures are used to greatly reduce the computational complexity in the backward pass of LESS and IED. Empirically, we demonstrate the superiority of our layers over the off-the-shelf baselines by comparing the solution optimality and computational requirements.
Semantic-aware Node Synthesis for Imbalanced Heterogeneous Information Networks
Feb 27, 2023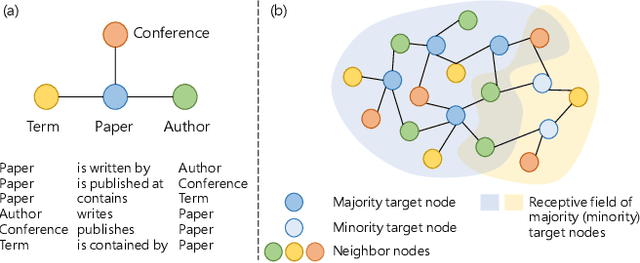
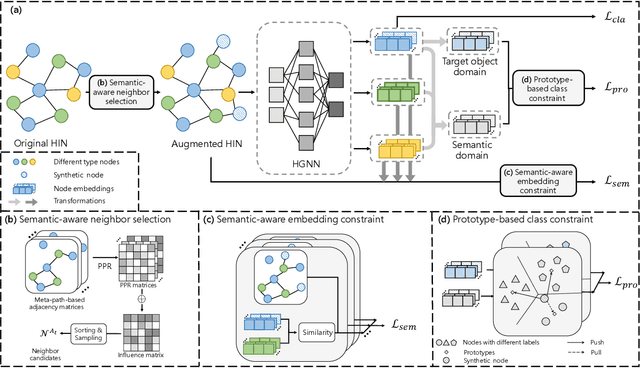


Heterogeneous graph neural networks (HGNNs) have exhibited exceptional efficacy in modeling the complex heterogeneity in heterogeneous information networks (HINs). The critical advantage of HGNNs is their ability to handle diverse node and edge types in HINs by extracting and utilizing the abundant semantic information for effective representation learning. However, as a widespread phenomenon in many real-world scenarios, the class-imbalance distribution in HINs creates a performance bottleneck for existing HGNNs. Apart from the quantity imbalance of nodes, another more crucial and distinctive challenge in HINs is semantic imbalance. Minority classes in HINs often lack diverse and sufficient neighbor nodes, resulting in biased and incomplete semantic information. This semantic imbalance further compounds the difficulty of accurately classifying minority nodes, leading to the performance degradation of HGNNs. To tackle the imbalance of minority classes and supplement their inadequate semantics, we present the first method for the semantic imbalance problem in imbalanced HINs named Semantic-aware Node Synthesis (SNS). By assessing the influence on minority classes, SNS adaptively selects the heterogeneous neighbor nodes and augments the network with synthetic nodes while preserving the minority semantics. In addition, we introduce two regularization approaches for HGNNs that constrain the representation of synthetic nodes from both semantic and class perspectives to effectively suppress the potential noises from synthetic nodes, facilitating more expressive embeddings for classification. The comprehensive experimental study demonstrates that SNS consistently outperforms existing methods by a large margin in different benchmark datasets.
Decentralized Multi-Agent Reinforcement Learning with Global State Prediction
Jun 22, 2023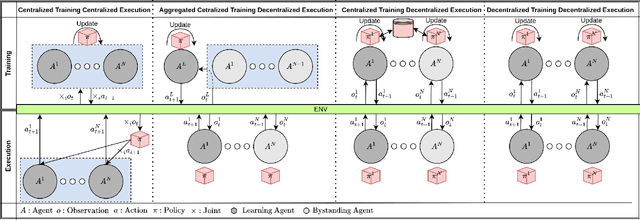
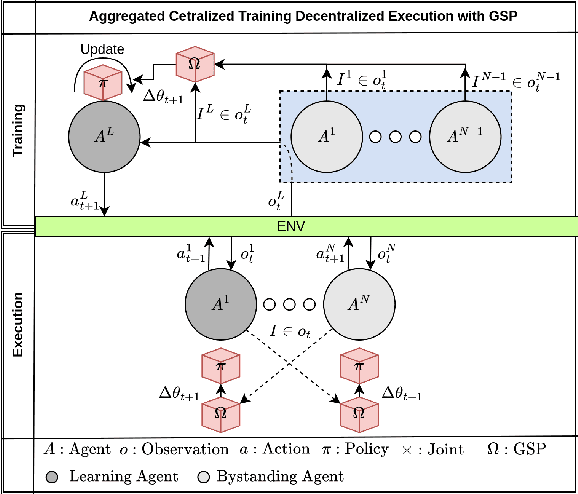
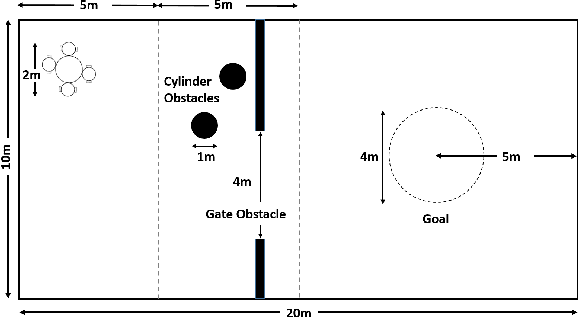
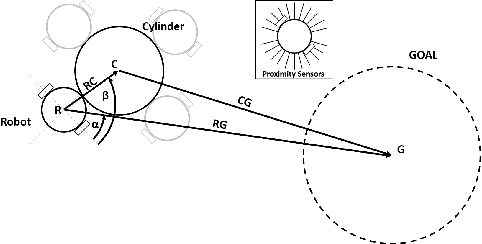
Deep reinforcement learning (DRL) has seen remarkable success in the control of single robots. However, applying DRL to robot swarms presents significant challenges. A critical challenge is non-stationarity, which occurs when two or more robots update individual or shared policies concurrently, thereby engaging in an interdependent training process with no guarantees of convergence. Circumventing non-stationarity typically involves training the robots with global information about other agents' states and/or actions. In contrast, in this paper we explore how to remove the need for global information. We pose our problem as a Partially Observable Markov Decision Process, due to the absence of global knowledge on other agents. Using collective transport as a testbed scenario, we study two approaches to multi-agent training. In the first, the robots exchange no messages, and are trained to rely on implicit communication through push-and-pull on the object to transport. In the second approach, we introduce Global State Prediction (GSP), a network trained to forma a belief over the swarm as a whole and predict its future states. We provide a comprehensive study over four well-known deep reinforcement learning algorithms in environments with obstacles, measuring performance as the successful transport of the object to the goal within a desired time-frame. Through an ablation study, we show that including GSP boosts performance and increases robustness when compared with methods that use global knowledge.
SeFNet: Bridging Tabular Datasets with Semantic Feature Nets
Jun 20, 2023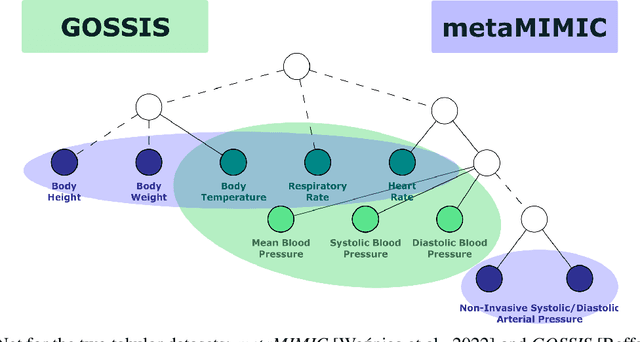
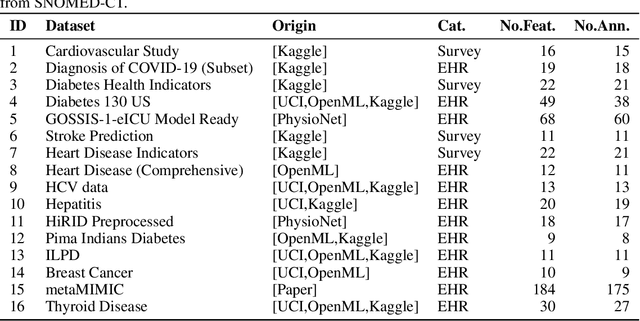
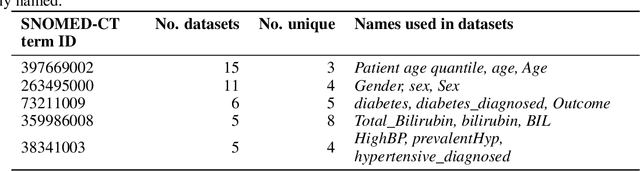
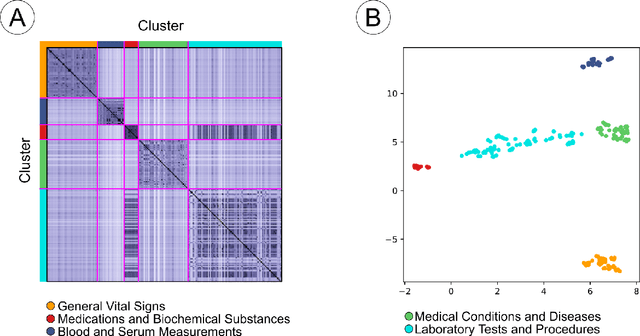
Machine learning applications cover a wide range of predictive tasks in which tabular datasets play a significant role. However, although they often address similar problems, tabular datasets are typically treated as standalone tasks. The possibilities of using previously solved problems are limited due to the lack of structured contextual information about their features and the lack of understanding of the relations between them. To overcome this limitation, we propose a new approach called Semantic Feature Net (SeFNet), capturing the semantic meaning of the analyzed tabular features. By leveraging existing ontologies and domain knowledge, SeFNet opens up new opportunities for sharing insights between diverse predictive tasks. One such opportunity is the Dataset Ontology-based Semantic Similarity (DOSS) measure, which quantifies the similarity between datasets using relations across their features. In this paper, we present an example of SeFNet prepared for a collection of predictive tasks in healthcare, with the features' relations derived from the SNOMED-CT ontology. The proposed SeFNet framework and the accompanying DOSS measure address the issue of limited contextual information in tabular datasets. By incorporating domain knowledge and establishing semantic relations between features, we enhance the potential for meta-learning and enable valuable insights to be shared across different predictive tasks.
Learning Variable Impedance Skills from Demonstrations with Passivity Guarantee
Jun 20, 2023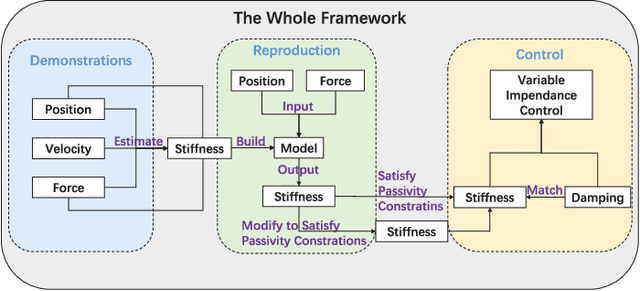
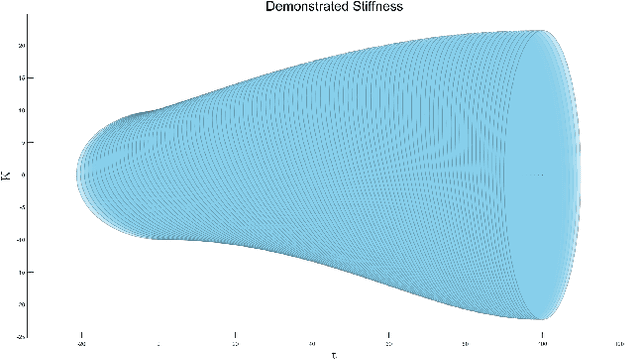
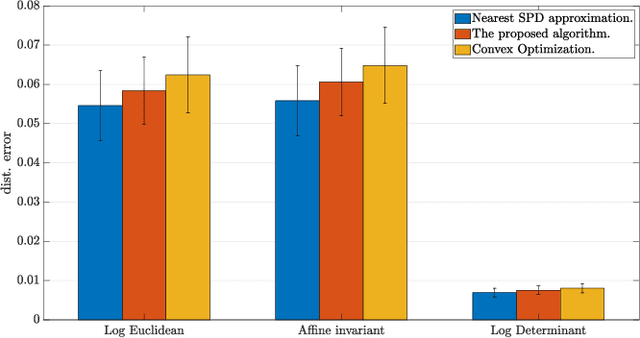
Robots are increasingly being deployed not only in workplaces but also in households. Effectively execute of manipulation tasks by robots relies on variable impedance control with contact forces. Furthermore, robots should possess adaptive capabilities to handle the considerable variations exhibited by different robotic tasks in dynamic environments, which can be obtained through human demonstrations. This paper presents a learning-from-demonstration framework that integrates force sensing and motion information to facilitate variable impedance control. The proposed approach involves the estimation of full stiffness matrices from human demonstrations, which are then combined with sensed forces and motion information to create a model using the non-parametric method. This model allows the robot to replicate the demonstrated task while also responding appropriately to new task conditions through the use of the state-dependent stiffness profile. Additionally, a novel tank based variable impedance control approach is proposed to ensure passivity by using the learned stiffness. The proposed approach was evaluated using two virtual variable stiffness systems. The first evaluation demonstrates that the stiffness estimated approach exhibits superior robustness compared to traditional methods when tested on manual datasets, and the second evaluation illustrates that the novel tank based approach is more easily implementable compared to traditional variable impedance control approaches.
UM-CAM: Uncertainty-weighted Multi-resolution Class Activation Maps for Weakly-supervised Fetal Brain Segmentation
Jun 20, 2023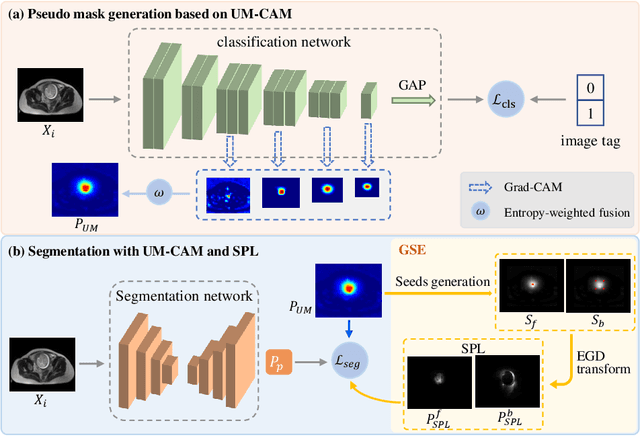
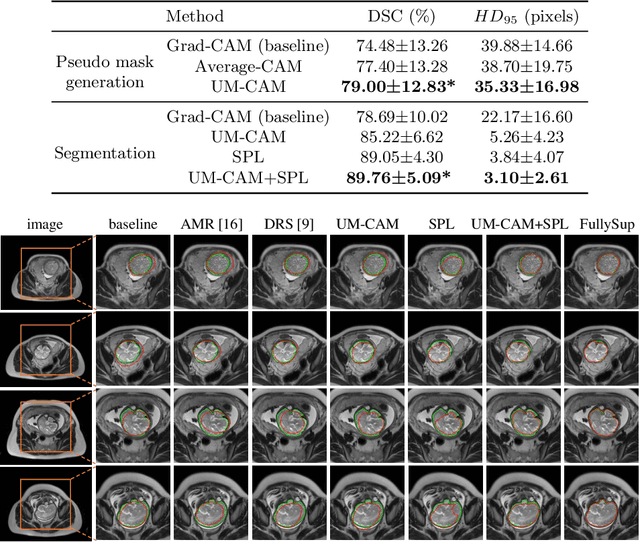
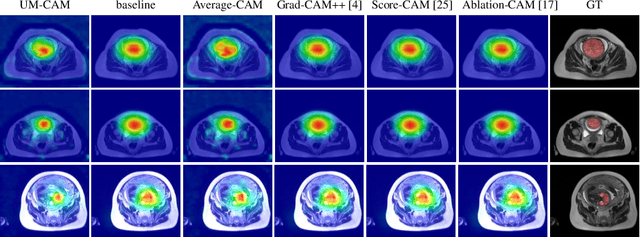
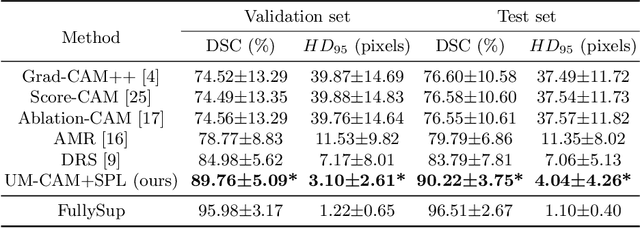
Accurate segmentation of the fetal brain from Magnetic Resonance Image (MRI) is important for prenatal assessment of fetal development. Although deep learning has shown the potential to achieve this task, it requires a large fine annotated dataset that is difficult to collect. To address this issue, weakly-supervised segmentation methods with image-level labels have gained attention, which are commonly based on class activation maps from a classification network trained with image tags. However, most of these methods suffer from incomplete activation regions, due to the low-resolution localization without detailed boundary cues. To this end, we propose a novel weakly-supervised method with image-level labels based on semantic features and context information exploration. We first propose an Uncertainty-weighted Multi-resolution Class Activation Map (UM-CAM) to generate high-quality pixel-level supervision. Then, we design a Geodesic distance-based Seed Expansion (GSE) method to provide context information for rectifying the ambiguous boundaries of UM-CAM. Extensive experiments on a fetal brain dataset show that our UM-CAM can provide more accurate activation regions with fewer false positive regions than existing CAM variants, and our proposed method outperforms state-of-the-art weakly-supervised methods with image-level labels.