 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePso
Papers and Code
Multi Objective Design Optimization of Non Pneumatic Passenger Car Tires Using Finite Element Modeling, Machine Learning, and Particle swarm Optimization and Bayesian Optimization Algorithms
Feb 04, 2026Non Pneumatic tires offer a promising alternative to pneumatic tires. However, their discontinuous spoke structures present challenges in stiffness tuning, durability, and high speed vibration. This study introduces an integrated generative design and machine learning driven framework to optimize UPTIS type spoke geometries for passenger vehicles. Upper and lower spoke profiles were parameterized using high order polynomial representations, enabling the creation of approximately 250 generative designs through PCHIP based geometric variation. Machine learning models like KRR for stiffness and XGBoost for durability and vibration achieved strong predictive accuracy, reducing the reliance on computationally intensive FEM simulations. Optimization using Particle Swarm Optimization and Bayesian Optimization further enabled extensive performance refinement. The resulting designs demonstrate 53% stiffness tunability, up to 50% durability improvement, and 43% reduction in vibration compared to the baseline. PSO provided fast, targeted convergence, while Bayesian Optimization effectively explored multi objective tradeoffs. Overall, the proposed framework enables systematic development of high performance, next generation UPTIS spoke structures.
Multi-Mode Pinching Antenna Systems Enabled Multi-User Communications
Jan 28, 2026This paper proposes a novel multi-mode pinching-antenna systems (PASS) framework. Multiple data streams can be transmitted within a single waveguide through multiple guided modes, thus facilitating efficient multi-user communications through the mode-domain multiplexing. A physic model is derived, which reveals the mode-selective power radiation feature of pinching antennas (PAs). A two-mode PASS enabled two-user downlink communication system is investigated. Considering the mode selectivity of PA power radiation, a practical PA grouping scheme is proposed, where each PA group matches with one specific guided mode and mainly radiates its signal sequentially. Depending on whether the guided mode leaks power to unmatched PAs or not, the proposed PA grouping scheme operates in either the non-leakage or weak-leakage regime. Based on this, the baseband beamforming and PA locations are jointly optimized for sum rate maximization, subject to each user's minimum rate requirement. 1) A simple two-PA case in non-leakage regime is first considered. To solve the formulated problem, a channel orthogonality based solution is proposed. The channel orthogonality is ensured by large-scale and wavelength-scale equality constraints on PA locations. Thus, the optimal beamforming reduces to maximum-ratio transmission (MRT). Moreover, the optimal PA locations are obtained via a Newton-based one-dimension search algorithm that enforces two-scale PA-location constraints by Newton's method. 2) A general multi-PA case in both non-leakage and weak-leakage regimes is further considered. A low-complexity particle-swarm optimization with zero-forcing beamforming (PSO-ZF) algorithm is developed, thus effectively tackling the high-oscillatory and strong-coupled problem. Simulation results demonstrate the superiority of the proposed multi-mode PASS over conventional single-mode PASS and fixed-antenna structures.
Reinforcement Learning-Based Energy-Aware Coverage Path Planning for Precision Agriculture
Jan 23, 2026Coverage Path Planning (CPP) is a fundamental capability for agricultural robots; however, existing solutions often overlook energy constraints, resulting in incomplete operations in large-scale or resource-limited environments. This paper proposes an energy-aware CPP framework grounded in Soft Actor-Critic (SAC) reinforcement learning, designed for grid-based environments with obstacles and charging stations. To enable robust and adaptive decision-making under energy limitations, the framework integrates Convolutional Neural Networks (CNNs) for spatial feature extraction and Long Short-Term Memory (LSTM) networks for temporal dynamics. A dedicated reward function is designed to jointly optimize coverage efficiency, energy consumption, and return-to-base constraints. Experimental results demonstrate that the proposed approach consistently achieves over 90% coverage while ensuring energy safety, outperforming traditional heuristic algorithms such as Rapidly-exploring Random Tree (RRT), Particle Swarm Optimization (PSO), and Ant Colony Optimization (ACO) baselines by 13.4-19.5% in coverage and reducing constraint violations by 59.9-88.3%. These findings validate the proposed SAC-based framework as an effective and scalable solution for energy-constrained CPP in agricultural robotics.
* Accepted by RACS '25: International Conference on Research in Adaptive and Convergent Systems, November 16-19, 2025, Ho Chi Minh, Vietnam. 10 pages, 5 figures
Generalization and Completeness of Stochastic Local Search Algorithms
Jan 20, 2026We generalize Stochastic Local Search (SLS) heuristics into a unique formal model. This model has two key components: a common structure designed to be as large as possible and a parametric structure intended to be as small as possible. Each heuristic is obtained by instantiating the parametric part in a different way. Particular instances for Genetic Algorithms (GA), Ant Colony Optimization (ACO), and Particle Swarm Optimization (PSO) are presented. Then, we use our model to prove the Turing-completeness of SLS algorithms in general. The proof uses our framework to construct a GA able to simulate any Turing machine. This Turing-completeness implies that determining any non-trivial property concerning the relationship between the inputs and the computed outputs is undecidable for GA and, by extension, for the general set of SLS methods (although not necessarily for each particular method). Similar proofs are more informally presented for PSO and ACO.
Quantifying the Impact of Modules and Their Interactions in the PSO-X Framework
Jan 07, 2026The PSO-X framework incorporates dozens of modules that have been proposed for solving single-objective continuous optimization problems using particle swarm optimization. While modular frameworks enable users to automatically generate and configure algorithms tailored to specific optimization problems, the complexity of this process increases with the number of modules in the framework and the degrees of freedom defined for their interaction. Understanding how modules affect the performance of algorithms for different problems is critical to making the process of finding effective implementations more efficient and identifying promising areas for further investigation. Despite their practical applications and scientific relevance, there is a lack of empirical studies investigating which modules matter most in modular optimization frameworks and how they interact. In this paper, we analyze the performance of 1424 particle swarm optimization algorithms instantiated from the PSO-X framework on the 25 functions in the CEC'05 benchmark suite with 10 and 30 dimensions. We use functional ANOVA to quantify the impact of modules and their combinations on performance in different problem classes. In practice, this allows us to identify which modules have greater influence on PSO-X performance depending on problem features such as multimodality, mathematical transformations and varying dimensionality. We then perform a cluster analysis to identify groups of problem classes that share similar module effect patterns. Our results show low variability in the importance of modules in all problem classes, suggesting that particle swarm optimization performance is driven by a few influential modules.
Fractional-order Modeling for Nonlinear Soft Actuators via Particle Swarm Optimization
Dec 20, 2025



Modeling soft pneumatic actuators with high precision remains a fundamental challenge due to their highly nonlinear and compliant characteristics. This paper proposes an innovative modeling framework based on fractional-order differential equations (FODEs) to accurately capture the dynamic behavior of soft materials. The unknown parameters within the fractional-order model are identified using particle swarm optimization (PSO), enabling parameter estimation directly from experimental data without reliance on pre-established material databases or empirical constitutive laws. The proposed approach effectively represents the complex deformation phenomena inherent in soft actuators. Experimental results validate the accuracy and robustness of the developed model, demonstrating improvement in predictive performance compared to conventional modeling techniques. The presented framework provides a data-efficient and database-independent solution for soft actuator modeling, advancing the precision and adaptability of soft robotic system design.
Optimized Scheduling and Positioning of Mobile Manipulators in Collaborative Applications
Dec 19, 2025The growing integration of mobile robots in shared workspaces requires efficient path planning and coordination between the agents, accounting for safety and productivity. In this work, we propose a digital model-based optimization framework for mobile manipulators in human-robot collaborative environments, in order to determine the sequence of robot base poses and the task scheduling for the robot. The complete problem is treated as black-box, and Particle Swarm Optimization (PSO) is employed to balance conflicting Key-Performance Indicators (KPIs). We demonstrate improvements in cycle time, task sequencing, and adaptation to human presence in a collaborative box-packing scenario.
RSMA-Assited and Transceiver-Coordinated ICI Management for MIMO-OFDM System
Dec 19, 2025



High-mobility scenarios are becoming increasingly critical in next-generation communication systems. While multiple-input multiple-output orthogonal frequency division multiplexing (MIMO-OFDM) stands as a prominent technology, its performance in such scenarios is fundamentally limited by Doppler-induced inter-carrier interference (ICI). Rate splitting multiple access (RSMA), recognized as a key multiple access technique for future communications, demonstrates superior interference management capabilities that we leverage to address this challenge. In specific, we propose a novel RSMA-assisted and transceiver-coordinated transmission scheme for ICI management in MIMO-OFDM system: (1) At the receiver side, we develop a hybrid successive interference cancellation (SIC) architecture with dynamic subcarrier clustering, which enables parallel intra-cluster and serial inter-cluster processing to balance complexity and performance. (2) At the transmitter~side, we design a matched hybrid precoding through formulated sum-rate maximization, solved via our proposed augmented boundary-compressed particle swarm optimization (ABC-PSO) algorithm for analog phase optimization and weighted minimum mean-square error (WMMSE)-based digital precoding iteration. Simulation results show that our scheme brings effective ICI suppression and enhanced system capacity with controlled complexity.
Cooperative Rotatable IRSs for Wireless Communications: Joint Beamforming and Orientation Optimization
Dec 16, 2025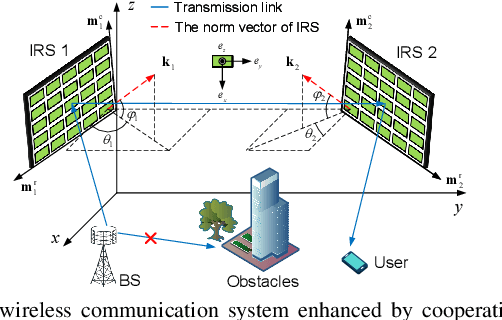
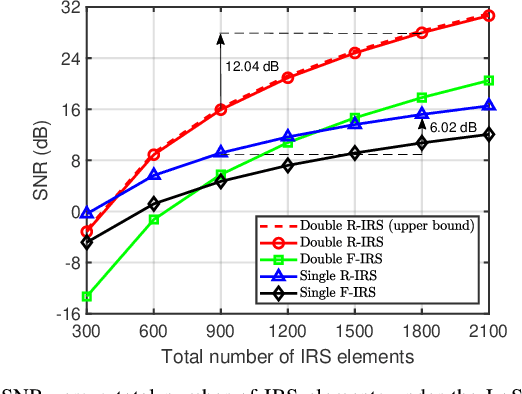
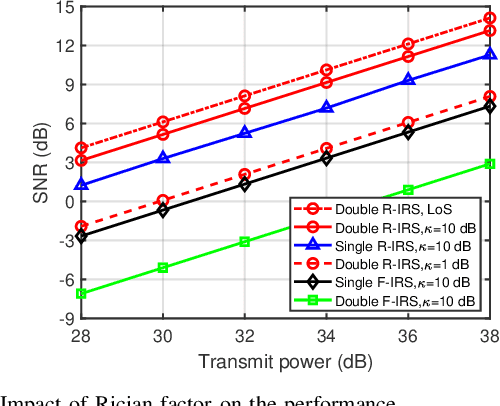
Rotatable intelligent reflecting surfaces (IRSs) introduce a new degree of freedom (DoF) for shaping wireless propagation by adaptively adjusting the orientation of IRSs. This paper considers an angle-dependent reflection model in a wireless communication system aided by two rotatable IRSs. Specifically, we study the joint design of the base station transmit beamforming, as well as the cooperative passive beamforming and orientation of the two IRSs, to maximize the received signal-to-noise ratio (SNR). Under the light-of-sight (LoS) channels, we first develop a particle swarm optimization (PSO) based method to determine the IRS rotation and derive an optimal rotation in a closed-form expression for a two-dimensional IRS deployment. Then, we extend the design to the general Rician fading channels by proposing an efficient alternating optimization and PSO (AO-PSO) algorithm. Numerical results validate the substantial gains achieved by the IRS rotation over fixed-IRS schemes and also demonstrate the superior performance of the double rotatable IRSs over a single rotatable IRS given a sufficient total number of IRS elements.
Hybrid Fuzzy Logic and Shading-Aware Particle Swarm Optimization for Dynamic Photovoltaic Shading Faults Mitigation
Dec 09, 2025Shading faults remain one of the most critical challenges affecting photovoltaic (PV) system efficiency, as they not only reduce power generation but also disturb maximum power point tracking (MPPT). To address this issue, this study introduces a hybrid optimization framework that combines Fuzzy Logic Control (FLC) with a Shading-Aware Particle Swarm Optimization (SA-PSO) method. The proposed scheme is designed to adapt dynamically to both partial shading (20%-80%) and complete shading events, ensuring reliable global maximum power point (GMPP) detection. In this approach, the fuzzy controller provides rapid decision support based on shading patterns, while SA-PSO accelerates the search process and prevents the system from becoming trapped in local minima. A comparative performance assessment with the conventional Perturb and Observe (P\&O) algorithm highlights the advantages of the hybrid model, showing up to an 11.8% improvement in power output and a 62% reduction in tracking time. These results indicate that integrating intelligent control with shading-aware optimization can significantly enhance the resilience and energy yield of PV systems operating under complex real-world conditions.