 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInstructSAM: Segment Any Instance with Any Instructions
May 25, 2026In this paper, we introduce InstructSAM, a unified and streamlined framework designed for multi-instance segmentation under arbitrary instructions. We formulates instruction-driven instance segmentation as a set-structured query prediction problem and propose an explicit reasoning-to-instance query interface that elegantly bridges a vision-language model (VLM) and SAM3. Specifically, a bank of learnable instance queries is injected into the VLM and contextualized with instruction and visual information, enabling each query to serve as an instance-aware slot. A hybrid-attention mechanism further promotes interaction among these queries, visual tokens, and instruction tokens, improving instance enumeration and reducing duplicate predictions. The resulting LLM-conditioned queries are projected into SAM3's detector query space to drive accurate multi-instance segmentation in a single forward pass. This design equips SAM3 with high-level instruction understanding, compositional reasoning, and instance-level set prediction without modifying its core architecture. To support training and evaluation, we further construct Inst2Seg, a high-quality and large-scale instruction-based instance segmentation dataset and benchmark that couples free-form instructions with instance-level masks. Extensive experiments show that only 2B-scale InstructSAM achieves strong results across complex instruction-driven and phrase-level referring segmentation benchmarks, outperforming prior end-to-end methods and SAM3's agentic pipeline while enabling efficient single-pass multi-instance prediction.
OmniCT: Towards a Unified Slice-Volume LVLM for Comprehensive CT Analysis
Feb 18, 2026Computed Tomography (CT) is one of the most widely used and diagnostically information-dense imaging modalities, covering critical organs such as the heart, lungs, liver, and colon. Clinical interpretation relies on both slice-driven local features (e.g., sub-centimeter nodules, lesion boundaries) and volume-driven spatial representations (e.g., tumor infiltration, inter-organ anatomical relations). However, existing Large Vision-Language Models (LVLMs) remain fragmented in CT slice versus volumetric understanding: slice-driven LVLMs show strong generalization but lack cross-slice spatial consistency, while volume-driven LVLMs explicitly capture volumetric semantics but suffer from coarse granularity and poor compatibility with slice inputs. The absence of a unified modeling paradigm constitutes a major bottleneck for the clinical translation of medical LVLMs. We present OmniCT, a powerful unified slice-volume LVLM for CT scenarios, which makes three contributions: (i) Spatial Consistency Enhancement (SCE): volumetric slice composition combined with tri-axial positional embedding that introduces volumetric consistency, and an MoE hybrid projection enables efficient slice-volume adaptation; (ii) Organ-level Semantic Enhancement (OSE): segmentation and ROI localization explicitly align anatomical regions, emphasizing lesion- and organ-level semantics; (iii) MedEval-CT: the largest slice-volume CT dataset and hybrid benchmark integrates comprehensive metrics for unified evaluation. OmniCT consistently outperforms existing methods with a substantial margin across diverse clinical tasks and satisfies both micro-level detail sensitivity and macro-level spatial reasoning. More importantly, it establishes a new paradigm for cross-modal medical imaging understanding.
RADAR: Robust Two-stage Modality-incomplete Industrial Anomaly Detection
Oct 02, 2024Multimodal Industrial Anomaly Detection (MIAD), utilizing 3D point clouds and 2D RGB images to identify the abnormal region of products, plays a crucial role in industrial quality inspection. However, the conventional MIAD setting presupposes that all 2D and 3D modalities are paired, overlooking the fact that multimodal data collected from the real world is often imperfect due to missing modalities. Consequently, MIAD models that demonstrate robustness against modal-incomplete data are highly desirable in practice. To address this practical challenge, we introduce a first-of-its-kind study that comprehensively investigates Modality-Incomplete Industrial Anomaly Detection (MIIAD), to consider the imperfect learning environment in which the multimodal information may be incomplete. Not surprisingly, we discovered that most existing MIAD approaches are inadequate for addressing MIIAD challenges, leading to significant performance degradation on the MIIAD benchmark we developed. In this paper, we propose a novel two-stage Robust modAlity-imcomplete fusing and Detecting frAmewoRk, abbreviated as RADAR. Our bootstrapping philosophy is to enhance two stages in MIIAD, improving the robustness of the Multimodal Transformer: i) In feature fusion, we first explore learning modality-incomplete instruction, guiding the pre-trained Multimodal Transformer to robustly adapt to various modality-incomplete scenarios, and implement adaptive parameter learning based on a HyperNetwork; ii) In anomaly detection, we construct a real-pseudo hybrid module to highlight the distinctiveness of modality combinations, further enhancing the robustness of the MIIAD model. Our experimental results demonstrate that the proposed RADAR significantly surpasses conventional MIAD methods in terms of effectiveness and robustness on our newly created MIIAD dataset, underscoring its practical application value.
TeamLoRA: Boosting Low-Rank Adaptation with Expert Collaboration and Competition
Aug 19, 2024



While Parameter-Efficient Fine-Tuning (PEFT) methods like LoRA have effectively addressed GPU memory constraints during fine-tuning, their performance often falls short, especially in multidimensional task scenarios. To address this issue, one straightforward solution is to introduce task-specific LoRA modules as domain experts, leveraging the modeling of multiple experts' capabilities and thus enhancing the general capability of multi-task learning. Despite promising, these additional components often add complexity to the training and inference process, contravening the efficient characterization of PEFT designed for. Considering this, we introduce an innovative PEFT method, TeamLoRA, consisting of a collaboration and competition module for experts, and thus achieving the right balance of effectiveness and efficiency: (i) For collaboration, a novel knowledge-sharing and -organizing mechanism is devised to appropriately reduce the scale of matrix operations, thereby boosting the training and inference speed. (ii) For competition, we propose leveraging a game-theoretic interaction mechanism for experts, encouraging experts to transfer their domain-specific knowledge while facing diverse downstream tasks, and thus enhancing the performance. By doing so, TeamLoRA elegantly connects the experts as a "Team" with internal collaboration and competition, enabling a faster and more accurate PEFT paradigm for multi-task learning. To validate the superiority of TeamLoRA, we curate a comprehensive multi-task evaluation(CME) benchmark to thoroughly assess the capability of multi-task learning. Experiments conducted on our CME and other benchmarks indicate the effectiveness and efficiency of TeamLoRA. Our project is available at https://github.com/Lin-Tianwei/TeamLoRA.
Push and Pull Search Embedded in an M2M Framework for Solving Constrained Multi-objective Optimization Problems
Jun 02, 2019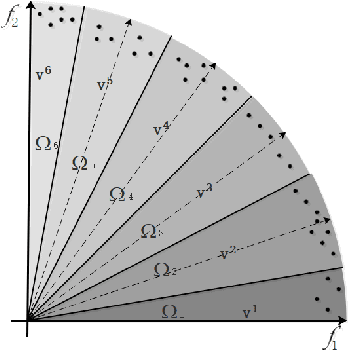
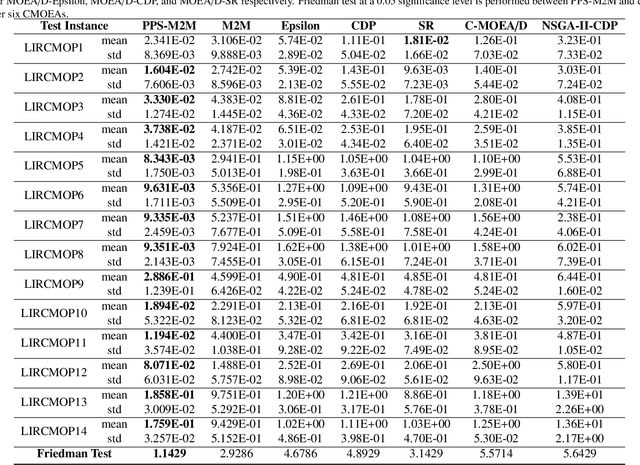
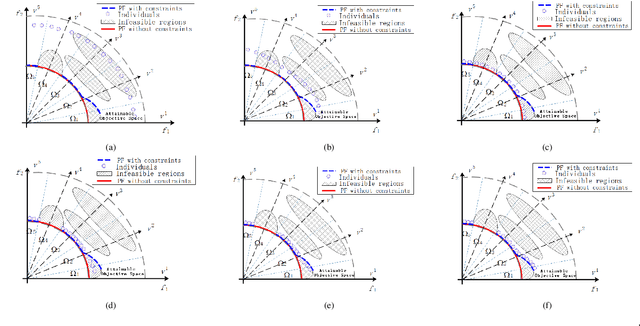

In dealing with constrained multi-objective optimization problems (CMOPs), a key issue of multi-objective evolutionary algorithms (MOEAs) is to balance the convergence and diversity of working populations.
Embedding Push and Pull Search in the Framework of Differential Evolution for Solving Constrained Single-objective Optimization Problems
Dec 16, 2018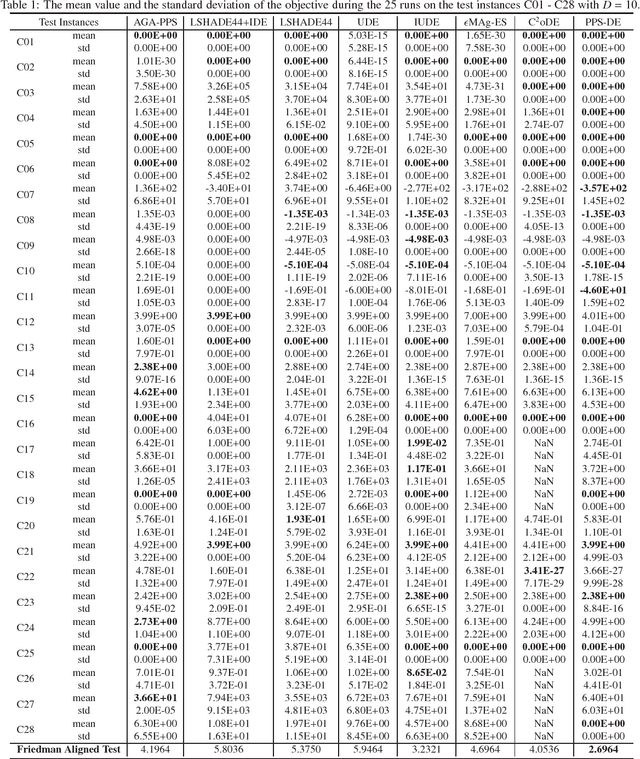
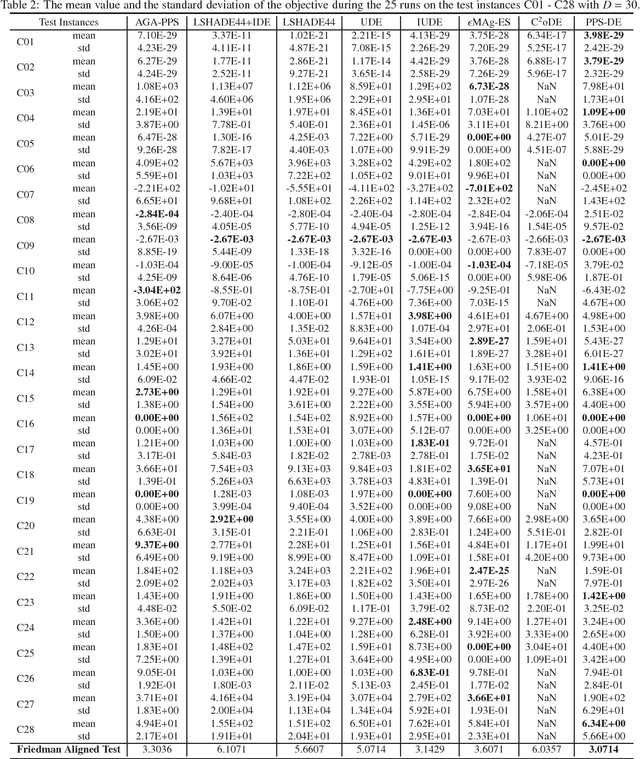
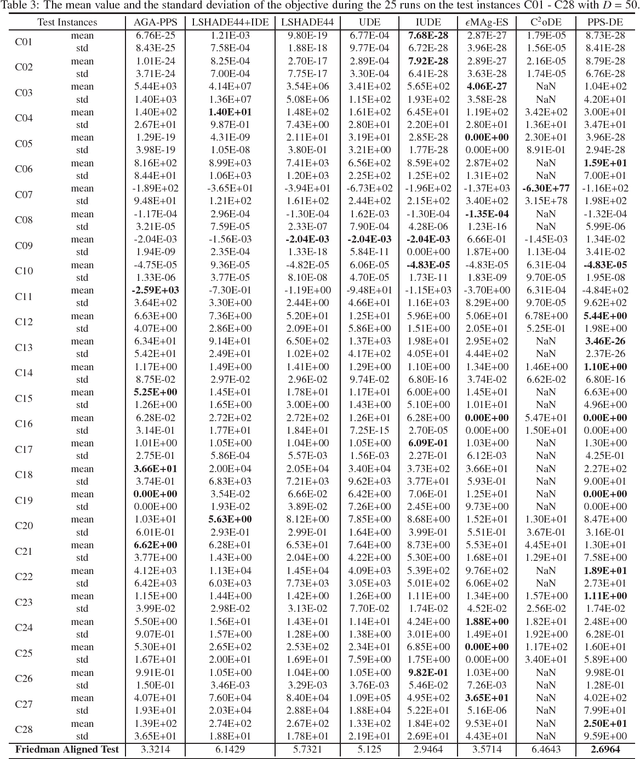
This paper proposes a push and pull search method in the framework of differential evolution (PPS-DE) to solve constrained single-objective optimization problems (CSOPs). More specifically, two sub-populations, including the top and bottom sub-populations, are collaborated with each other to search global optimal solutions efficiently. The top sub-population adopts the pull and pull search (PPS) mechanism to deal with constraints, while the bottom sub-population use the superiority of feasible solutions (SF) technique to deal with constraints. In the top sub-population, the search process is divided into two different stages --- push and pull stages.An adaptive DE variant with three trial vector generation strategies is employed in the proposed PPS-DE. In the top sub-population, all the three trial vector generation strategies are used to generate offsprings, just like in CoDE. In the bottom sub-population, a strategy adaptation, in which the trial vector generation strategies are periodically self-adapted by learning from their experiences in generating promising solutions in the top sub-population, is used to choose a suitable trial vector generation strategy to generate one offspring. Furthermore, a parameter adaptation strategy from LSHADE44 is employed in both sup-populations to generate scale factor $F$ and crossover rate $CR$ for each trial vector generation strategy. Twenty-eight CSOPs with 10-, 30-, and 50-dimensional decision variables provided in the CEC2018 competition on real parameter single objective optimization are optimized by the proposed PPS-DE. The experimental results demonstrate that the proposed PPS-DE has the best performance compared with the other seven state-of-the-art algorithms, including AGA-PPS, LSHADE44, LSHADE44+IDE, UDE, IUDE, $\epsilon$MAg-ES and C$^2$oDE.