 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFound-RL: foundation model-enhanced reinforcement learning for autonomous driving
Feb 11, 2026Reinforcement Learning (RL) has emerged as a dominant paradigm for end-to-end autonomous driving (AD). However, RL suffers from sample inefficiency and a lack of semantic interpretability in complex scenarios. Foundation Models, particularly Vision-Language Models (VLMs), can mitigate this by offering rich, context-aware knowledge, yet their high inference latency hinders deployment in high-frequency RL training loops. To bridge this gap, we present Found-RL, a platform tailored to efficiently enhance RL for AD using foundation models. A core innovation is the asynchronous batch inference framework, which decouples heavy VLM reasoning from the simulation loop, effectively resolving latency bottlenecks to support real-time learning. We introduce diverse supervision mechanisms: Value-Margin Regularization (VMR) and Advantage-Weighted Action Guidance (AWAG) to effectively distill expert-like VLM action suggestions into the RL policy. Additionally, we adopt high-throughput CLIP for dense reward shaping. We address CLIP's dynamic blindness via Conditional Contrastive Action Alignment, which conditions prompts on discretized speed/command and yields a normalized, margin-based bonus from context-specific action-anchor scoring. Found-RL provides an end-to-end pipeline for fine-tuned VLM integration and shows that a lightweight RL model can achieve near-VLM performance compared with billion-parameter VLMs while sustaining real-time inference (approx. 500 FPS). Code, data, and models will be publicly available at https://github.com/ys-qu/found-rl.
Impact Analysis of Inference Time Attack of Perception Sensors on Autonomous Vehicles
May 05, 2025As a safety-critical cyber-physical system, cybersecurity and related safety issues for Autonomous Vehicles (AVs) have been important research topics for a while. Among all the modules on AVs, perception is one of the most accessible attack surfaces, as drivers and AVs have no control over the outside environment. Most current work targeting perception security for AVs focuses on perception correctness. In this work, we propose an impact analysis based on inference time attacks for autonomous vehicles. We demonstrate in a simulation system that such inference time attacks can also threaten the safety of both the ego vehicle and other traffic participants.
On-Board Vision-Language Models for Personalized Autonomous Vehicle Motion Control: System Design and Real-World Validation
Nov 17, 2024



Personalized driving refers to an autonomous vehicle's ability to adapt its driving behavior or control strategies to match individual users' preferences and driving styles while maintaining safety and comfort standards. However, existing works either fail to capture every individual preference precisely or become computationally inefficient as the user base expands. Vision-Language Models (VLMs) offer promising solutions to this front through their natural language understanding and scene reasoning capabilities. In this work, we propose a lightweight yet effective on-board VLM framework that provides low-latency personalized driving performance while maintaining strong reasoning capabilities. Our solution incorporates a Retrieval-Augmented Generation (RAG)-based memory module that enables continuous learning of individual driving preferences through human feedback. Through comprehensive real-world vehicle deployment and experiments, our system has demonstrated the ability to provide safe, comfortable, and personalized driving experiences across various scenarios and significantly reduce takeover rates by up to 76.9%. To the best of our knowledge, this work represents the first end-to-end VLM-based motion control system in real-world autonomous vehicles.
Vehicle-group-based Crash Risk Formation and Propagation Analysis for Expressways
Feb 19, 2024



Previous studies in predicting crash risk primarily associated the number or likelihood of crashes on a road segment with traffic parameters or geometric characteristics of the segment, usually neglecting the impact of vehicles' continuous movement and interactions with nearby vehicles. Advancements in communication technologies have empowered driving information collected from surrounding vehicles, enabling the study of group-based crash risks. Based on high-resolution vehicle trajectory data, this research focused on vehicle groups as the subject of analysis and explored risk formation and propagation mechanisms considering features of vehicle groups and road segments. Several key factors contributing to crash risks were identified, including past high-risk vehicle-group states, complex vehicle behaviors, high percentage of large vehicles, frequent lane changes within a vehicle group, and specific road geometries. A multinomial logistic regression model was developed to analyze the spatial risk propagation patterns, which were classified based on the trend of high-risk occurrences within vehicle groups. The results indicated that extended periods of high-risk states, increase in vehicle-group size, and frequent lane changes are associated with adverse risk propagation patterns. Conversely, smoother traffic flow and high initial crash risk values are linked to risk dissipation. Furthermore, the study conducted sensitivity analysis on different types of classifiers, prediction time intervalsss and adaptive TTC thresholds. The highest AUC value for vehicle-group risk prediction surpassed 0.93. The findings provide valuable insights to researchers and practitioners in understanding and prediction of vehicle-group safety, ultimately improving active traffic safety management and operations of Connected and Autonomous Vehicles.
Evaluation of Infrastructure-based Warning System on Driving Behaviors-A Roundabout Study
Dec 06, 2023Smart intersections have the potential to improve road safety with sensing, communication, and edge computing technologies. Perception sensors installed at a smart intersection can monitor the traffic environment in real time and send infrastructure-based warnings to nearby travelers through V2X communication. This paper investigated how infrastructure-based warnings can influence driving behaviors and improve roundabout safety through a driving-simulator study - a challenging driving scenario for human drivers. A co-simulation platform integrating Simulation of Urban Mobility (SUMO) and Webots was developed to serve as the driving simulator. A real-world roundabout in Ann Arbor, Michigan was built in the co-simulation platform as the study area, and the merging scenarios were investigated. 36 participants were recruited and asked to navigate the roundabout under three danger levels (e.g., low, medium, high) and three collision warning designs (e.g., no warning, warning issued 1 second in advance, warning issued 2 seconds in advance). Results indicated that advanced warnings can significantly enhance safety by minimizing potential risks compared to scenarios without warnings. Earlier warnings enabled smoother driver responses and reduced abrupt decelerations. In addition, a personalized intention prediction model was developed to predict drivers' stop-or-go decisions when the warning is displayed. Among all tested machine learning models, the XGBoost model achieved the highest prediction accuracy with a precision rate of 95.56% and a recall rate of 97.73%.
An enhanced motion planning approach by integrating driving heterogeneity and long-term trajectory prediction for automated driving systems
Aug 02, 2023



Navigating automated driving systems (ADSs) through complex driving environments is difficult. Predicting the driving behavior of surrounding human-driven vehicles (HDVs) is a critical component of an ADS. This paper proposes an enhanced motion-planning approach for an ADS in a highway-merging scenario. The proposed enhanced approach utilizes the results of two aspects: the driving behavior and long-term trajectory of surrounding HDVs, which are coupled using a hierarchical model that is used for the motion planning of an ADS to improve driving safety.
Improving Autonomous Vehicle Mapping and Navigation in Work Zones Using Crowdsourcing Vehicle Trajectories
Jan 22, 2023Prevalent solutions for Connected and Autonomous vehicle (CAV) mapping include high definition map (HD map) or real-time Simultaneous Localization and Mapping (SLAM). Both methods only rely on vehicle itself (onboard sensors or embedded maps) and can not adapt well to temporarily changed drivable areas such as work zones. Navigating CAVs in such areas heavily relies on how the vehicle defines drivable areas based on perception information. Difficulties in improving perception accuracy and ensuring the correct interpretation of perception results are challenging to the vehicle in these situations. This paper presents a prototype that introduces crowdsourcing trajectories information into the mapping process to enhance CAV's understanding on the drivable area and traffic rules. A Gaussian Mixture Model (GMM) is applied to construct the temporarily changed drivable area and occupancy grid map (OGM) based on crowdsourcing trajectories. The proposed method is compared with SLAM without any human driving information. Our method has adapted well with the downstream path planning and vehicle control module, and the CAV did not violate driving rule, which a pure SLAM method did not achieve.
A Cooperative Perception Environment for Traffic Operations and Control
Aug 04, 2022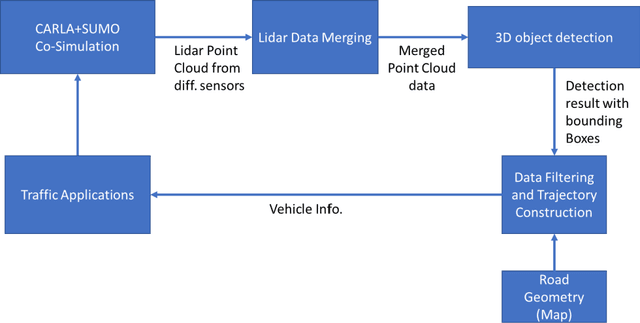

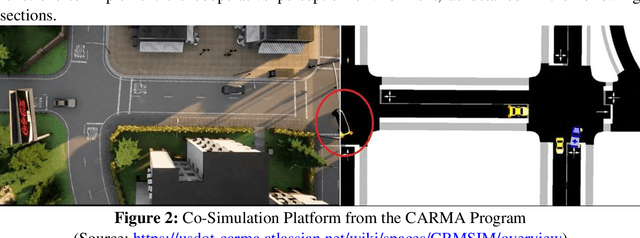

Existing data collection methods for traffic operations and control usually rely on infrastructure-based loop detectors or probe vehicle trajectories. Connected and automated vehicles (CAVs) not only can report data about themselves but also can provide the status of all detected surrounding vehicles. Integration of perception data from multiple CAVs as well as infrastructure sensors (e.g., LiDAR) can provide richer information even under a very low penetration rate. This paper aims to develop a cooperative data collection system, which integrates Lidar point cloud data from both infrastructure and CAVs to create a cooperative perception environment for various transportation applications. The state-of-the-art 3D detection models are applied to detect vehicles in the merged point cloud. We test the proposed cooperative perception environment with the max pressure adaptive signal control model in a co-simulation platform with CARLA and SUMO. Results show that very low penetration rates of CAV plus an infrastructure sensor are sufficient to achieve comparable performance with 30% or higher penetration rates of connected vehicles (CV). We also show the equivalent CV penetration rate (E-CVPR) under different CAV penetration rates to demonstrate the data collection efficiency of the cooperative perception environment.
A Learning-based Stochastic Driving Model for Autonomous Vehicle Testing
Feb 04, 2021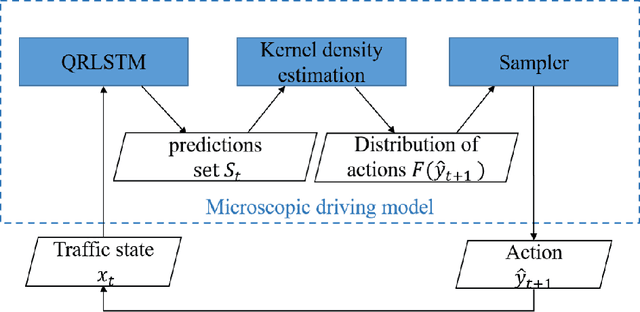
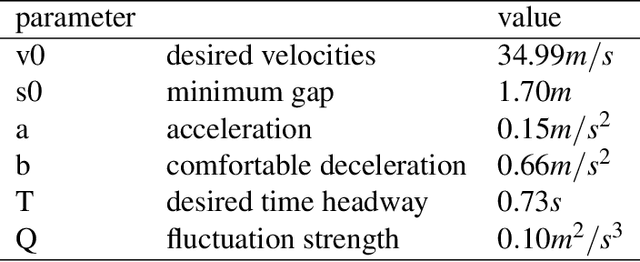
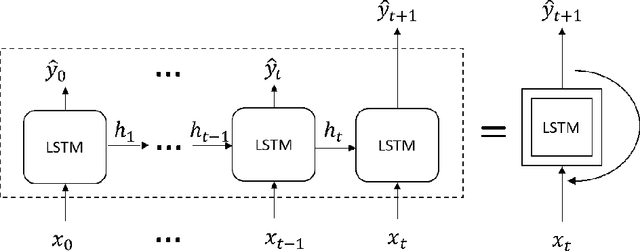
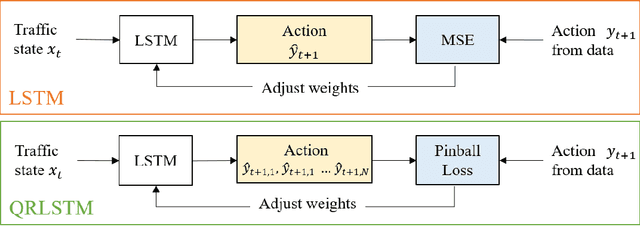
In the simulation-based testing and evaluation of autonomous vehicles (AVs), how background vehicles (BVs) drive directly influences the AV's driving behavior and further impacts the testing result. Existing simulation platforms use either pre-determined trajectories or deterministic driving models to model the BVs' behaviors. However, pre-determined BV trajectories can not react to the AV's maneuvers, and deterministic models are different from real human drivers due to the lack of stochastic components and errors. Both methods lead to unrealistic traffic scenarios. This paper presents a learning-based stochastic driving model that meets the unique needs of AV testing, i.e. interactive and human-like. The model is built based on the long-short-term-memory (LSTM) architecture. By incorporating the concept of quantile-regression to the loss function of the model, the stochastic behaviors are reproduced without any prior assumption of human drivers. The model is trained with the large-scale naturalistic driving data (NDD) from the Safety Pilot Model Deployment(SPMD) project and then compared with a stochastic intelligent driving model (IDM). Analysis of individual trajectories shows that the proposed model can reproduce more similar trajectories to human drivers than IDM. To validate the ability of the proposed model in generating a naturalistic driving environment, traffic simulation experiments are implemented. The results show that the traffic flow parameters such as speed, range, and headway distribution match closely with the NDD, which is of significant importance for AV testing and evaluation.
Testing Scenario Library Generation for Connected and Automated Vehicles, Part II: Case Studies
May 09, 2019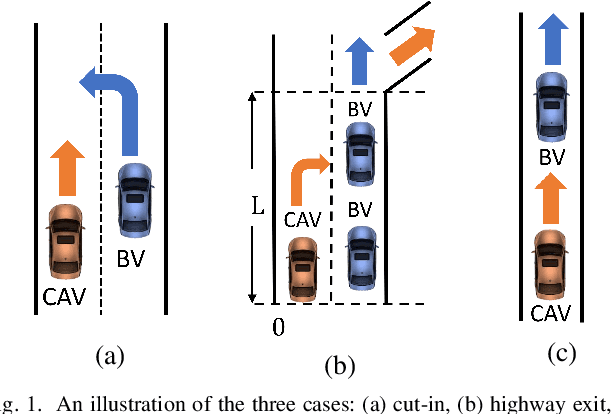
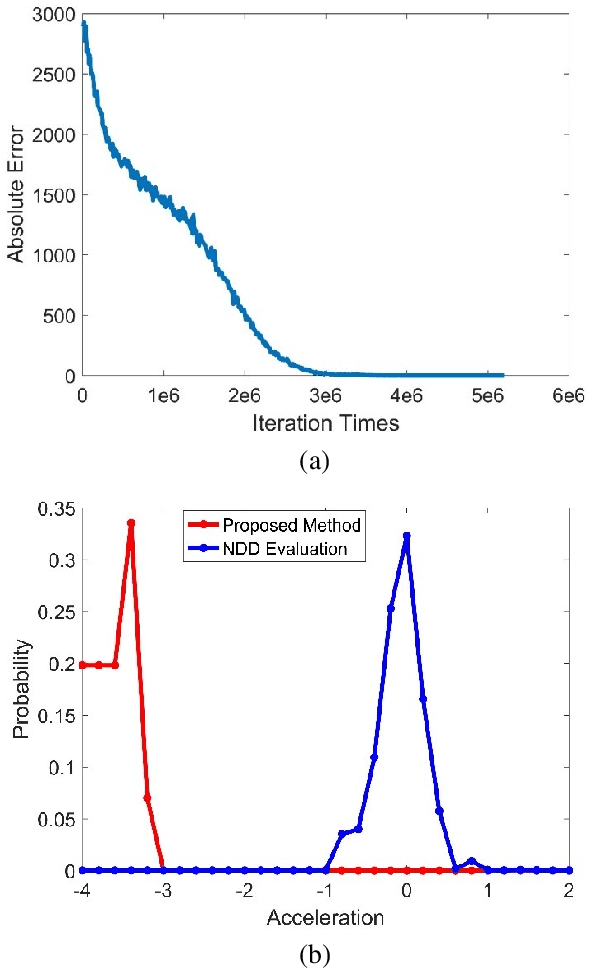
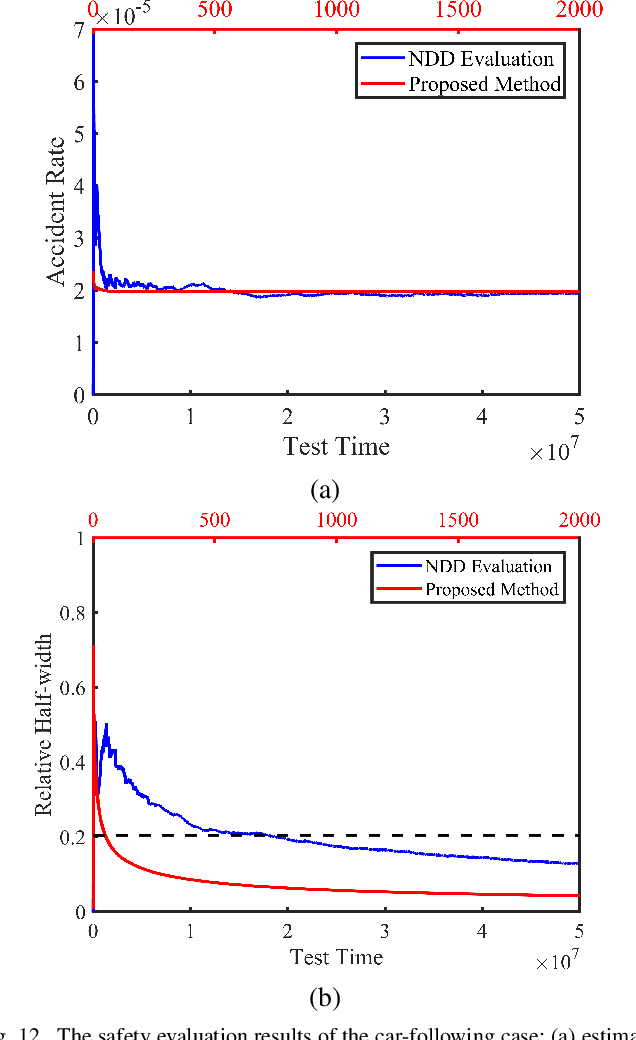
Testing and evaluation is a critical step in the development and deployment of connected and automated vehicles (CAVs), and yet there is no systematic framework to generate testing scenario library. In Part I of the paper, a general framework is proposed to solve the testing scenario library generation (TSLG) problem with four associated research questions. The methodologies of solving each research question have been proposed and analyzed theoretically. In Part II of the paper, three case studies are designed and implemented to demonstrate the proposed methodologies. First, a cut-in case is designed for safety evaluation and to provide answers to three particular questions in the framework, i.e., auxiliary objective function design, naturalistic driving data (NDD) analysis, and surrogate model (SM) construction. Second, a highway exit case is designed for functionality evaluation. Third, a car-following case is designed to show the ability of the proposed methods in handling high-dimensional scenarios. To address the challenges brought by higher dimensions, the proposed methods are enhanced by reinforcement learning (RL) techniques. Typical CAV models are chosen and evaluated by simulations. Results show that the proposed methods can accelerate the CAV evaluation process by $255$ to $3.75\times10^5$ times compared with the public road test method, with same accuracy of indices.