 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Diverse Multi-Agent Learning via Rational Policy Gradient
Nov 12, 2025Adversarial optimization algorithms that explicitly search for flaws in agents' policies have been successfully applied to finding robust and diverse policies in multi-agent settings. However, the success of adversarial optimization has been largely limited to zero-sum settings because its naive application in cooperative settings leads to a critical failure mode: agents are irrationally incentivized to self-sabotage, blocking the completion of tasks and halting further learning. To address this, we introduce Rationality-preserving Policy Optimization (RPO), a formalism for adversarial optimization that avoids self-sabotage by ensuring agents remain rational--that is, their policies are optimal with respect to some possible partner policy. To solve RPO, we develop Rational Policy Gradient (RPG), which trains agents to maximize their own reward in a modified version of the original game in which we use opponent shaping techniques to optimize the adversarial objective. RPG enables us to extend a variety of existing adversarial optimization algorithms that, no longer subject to the limitations of self-sabotage, can find adversarial examples, improve robustness and adaptability, and learn diverse policies. We empirically validate that our approach achieves strong performance in several popular cooperative and general-sum environments. Our project page can be found at https://rational-policy-gradient.github.io.
GSM-Agent: Understanding Agentic Reasoning Using Controllable Environments
Sep 26, 2025
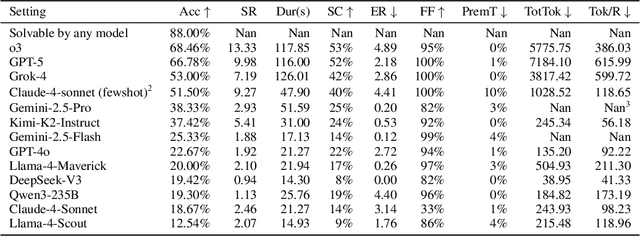

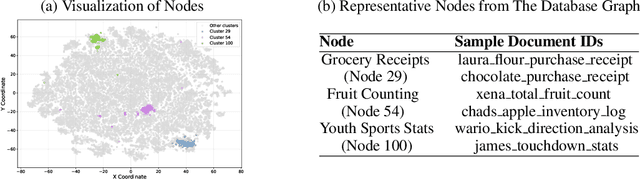
As LLMs are increasingly deployed as agents, agentic reasoning - the ability to combine tool use, especially search, and reasoning - becomes a critical skill. However, it is hard to disentangle agentic reasoning when evaluated in complex environments and tasks. Current agent benchmarks often mix agentic reasoning with challenging math reasoning, expert-level knowledge, and other advanced capabilities. To fill this gap, we build a novel benchmark, GSM-Agent, where an LLM agent is required to solve grade-school-level reasoning problems, but is only presented with the question in the prompt without the premises that contain the necessary information to solve the task, and needs to proactively collect that information using tools. Although the original tasks are grade-school math problems, we observe that even frontier models like GPT-5 only achieve 67% accuracy. To understand and analyze the agentic reasoning patterns, we propose the concept of agentic reasoning graph: cluster the environment's document embeddings into nodes, and map each tool call to its nearest node to build a reasoning path. Surprisingly, we identify that the ability to revisit a previously visited node, widely taken as a crucial pattern in static reasoning, is often missing for agentic reasoning for many models. Based on the insight, we propose a tool-augmented test-time scaling method to improve LLM's agentic reasoning performance by adding tools to encourage models to revisit. We expect our benchmark and the agentic reasoning framework to aid future studies of understanding and pushing the boundaries of agentic reasoning.
The Singapore Consensus on Global AI Safety Research Priorities
Jun 25, 2025


Rapidly improving AI capabilities and autonomy hold significant promise of transformation, but are also driving vigorous debate on how to ensure that AI is safe, i.e., trustworthy, reliable, and secure. Building a trusted ecosystem is therefore essential -- it helps people embrace AI with confidence and gives maximal space for innovation while avoiding backlash. The "2025 Singapore Conference on AI (SCAI): International Scientific Exchange on AI Safety" aimed to support research in this space by bringing together AI scientists across geographies to identify and synthesise research priorities in AI safety. This resulting report builds on the International AI Safety Report chaired by Yoshua Bengio and backed by 33 governments. By adopting a defence-in-depth model, this report organises AI safety research domains into three types: challenges with creating trustworthy AI systems (Development), challenges with evaluating their risks (Assessment), and challenges with monitoring and intervening after deployment (Control).
Generalization or Hallucination? Understanding Out-of-Context Reasoning in Transformers
Jun 12, 2025Large language models (LLMs) can acquire new knowledge through fine-tuning, but this process exhibits a puzzling duality: models can generalize remarkably from new facts, yet are also prone to hallucinating incorrect information. However, the reasons for this phenomenon remain poorly understood. In this work, we argue that both behaviors stem from a single mechanism known as out-of-context reasoning (OCR): the ability to deduce implications by associating concepts, even those without a causal link. Our experiments across five prominent LLMs confirm that OCR indeed drives both generalization and hallucination, depending on whether the associated concepts are causally related. To build a rigorous theoretical understanding of this phenomenon, we then formalize OCR as a synthetic factual recall task. We empirically show that a one-layer single-head attention-only transformer with factorized output and value matrices can learn to solve this task, while a model with combined weights cannot, highlighting the crucial role of matrix factorization. Our theoretical analysis shows that the OCR capability can be attributed to the implicit bias of gradient descent, which favors solutions that minimize the nuclear norm of the combined output-value matrix. This mathematical structure explains why the model learns to associate facts and implications with high sample efficiency, regardless of whether the correlation is causal or merely spurious. Ultimately, our work provides a theoretical foundation for understanding the OCR phenomenon, offering a new lens for analyzing and mitigating undesirable behaviors from knowledge injection.
Provable Sim-to-Real Transfer via Offline Domain Randomization
Jun 11, 2025


Reinforcement-learning agents often struggle when deployed from simulation to the real-world. A dominant strategy for reducing the sim-to-real gap is domain randomization (DR) which trains the policy across many simulators produced by sampling dynamics parameters, but standard DR ignores offline data already available from the real system. We study offline domain randomization (ODR), which first fits a distribution over simulator parameters to an offline dataset. While a growing body of empirical work reports substantial gains with algorithms such as DROPO, the theoretical foundations of ODR remain largely unexplored. In this work, we (i) formalize ODR as a maximum-likelihood estimation over a parametric simulator family, (ii) prove consistency of this estimator under mild regularity and identifiability conditions, showing it converges to the true dynamics as the dataset grows, (iii) derive gap bounds demonstrating ODRs sim-to-real error is up to an O(M) factor tighter than uniform DR in the finite-simulator case (and analogous gains in the continuous setting), and (iv) introduce E-DROPO, a new version of DROPO which adds an entropy bonus to prevent variance collapse, yielding broader randomization and more robust zero-shot transfer in practice.
Reasoning by Superposition: A Theoretical Perspective on Chain of Continuous Thought
May 18, 2025Large Language Models (LLMs) have demonstrated remarkable performance in many applications, including challenging reasoning problems via chain-of-thoughts (CoTs) techniques that generate ``thinking tokens'' before answering the questions. While existing theoretical works demonstrate that CoTs with discrete tokens boost the capability of LLMs, recent work on continuous CoTs lacks a theoretical understanding of why it outperforms discrete counterparts in various reasoning tasks such as directed graph reachability, a fundamental graph reasoning problem that includes many practical domain applications as special cases. In this paper, we prove that a two-layer transformer with $D$ steps of continuous CoTs can solve the directed graph reachability problem, where $D$ is the diameter of the graph, while the best known result of constant-depth transformers with discrete CoTs requires $O(n^2)$ decoding steps where $n$ is the number of vertices ($D<n$). In our construction, each continuous thought vector is a superposition state that encodes multiple search frontiers simultaneously (i.e., parallel breadth-first search (BFS)), while discrete CoTs must choose a single path sampled from the superposition state, which leads to sequential search that requires many more steps and may be trapped into local solutions. We also performed extensive experiments to verify that our theoretical construction aligns well with the empirical solution obtained via training dynamics. Notably, encoding of multiple search frontiers as a superposition state automatically emerges in training continuous CoTs, without explicit supervision to guide the model to explore multiple paths simultaneously.
AssistanceZero: Scalably Solving Assistance Games
Apr 09, 2025Assistance games are a promising alternative to reinforcement learning from human feedback (RLHF) for training AI assistants. Assistance games resolve key drawbacks of RLHF, such as incentives for deceptive behavior, by explicitly modeling the interaction between assistant and user as a two-player game where the assistant cannot observe their shared goal. Despite their potential, assistance games have only been explored in simple settings. Scaling them to more complex environments is difficult because it requires both solving intractable decision-making problems under uncertainty and accurately modeling human users' behavior. We present the first scalable approach to solving assistance games and apply it to a new, challenging Minecraft-based assistance game with over $10^{400}$ possible goals. Our approach, AssistanceZero, extends AlphaZero with a neural network that predicts human actions and rewards, enabling it to plan under uncertainty. We show that AssistanceZero outperforms model-free RL algorithms and imitation learning in the Minecraft-based assistance game. In a human study, our AssistanceZero-trained assistant significantly reduces the number of actions participants take to complete building tasks in Minecraft. Our results suggest that assistance games are a tractable framework for training effective AI assistants in complex environments. Our code and models are available at https://github.com/cassidylaidlaw/minecraft-building-assistance-game.
Asking for Help Enables Safety Guarantees Without Sacrificing Effectiveness
Feb 19, 2025Most reinforcement learning algorithms with regret guarantees rely on a critical assumption: that all errors are recoverable. Recent work by Plaut et al. discarded this assumption and presented algorithms that avoid "catastrophe" (i.e., irreparable errors) by asking for help. However, they provided only safety guarantees and did not consider reward maximization. We prove that any algorithm that avoids catastrophe in their setting also guarantees high reward (i.e., sublinear regret) in any Markov Decision Process (MDP), including MDPs with irreversible costs. This constitutes the first no-regret guarantee for general MDPs. More broadly, our result may be the first formal proof that it is possible for an agent to obtain high reward while becoming self-sufficient in an unknown, unbounded, and high-stakes environment without causing catastrophe or requiring resets.
How Do LLMs Perform Two-Hop Reasoning in Context?
Feb 19, 2025



"Socrates is human. All humans are mortal. Therefore, Socrates is mortal." This classical example demonstrates two-hop reasoning, where a conclusion logically follows from two connected premises. While transformer-based Large Language Models (LLMs) can make two-hop reasoning, they tend to collapse to random guessing when faced with distracting premises. To understand the underlying mechanism, we train a three-layer transformer on synthetic two-hop reasoning tasks. The training dynamics show two stages: a slow learning phase, where the 3-layer transformer performs random guessing like LLMs, followed by an abrupt phase transitions, where the 3-layer transformer suddenly reaches $100%$ accuracy. Through reverse engineering, we explain the inner mechanisms for how models learn to randomly guess between distractions initially, and how they learn to ignore distractions eventually. We further propose a three-parameter model that supports the causal claims for the mechanisms to the training dynamics of the transformer. Finally, experiments on LLMs suggest that the discovered mechanisms generalize across scales. Our methodologies provide new perspectives for scientific understandings of LLMs and our findings provide new insights into how reasoning emerges during training.
International AI Safety Report
Jan 29, 2025



The first International AI Safety Report comprehensively synthesizes the current evidence on the capabilities, risks, and safety of advanced AI systems. The report was mandated by the nations attending the AI Safety Summit in Bletchley, UK. Thirty nations, the UN, the OECD, and the EU each nominated a representative to the report's Expert Advisory Panel. A total of 100 AI experts contributed, representing diverse perspectives and disciplines. Led by the report's Chair, these independent experts collectively had full discretion over the report's content.