 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge4D-GSW: Kinematic-Aware Spatio-Temporal Consistent Watermarking for 4D Gaussian Splatting
May 21, 2026While 4D Gaussian Splatting (4DGS) has revolutionized high-fidelity dynamic reconstruction, safeguarding the intellectual property of these assets remains an open challenge. Conventional steganographic techniques often neglect the underlying kinematic manifolds, triggering non-physical artifacts such as severe temporal flickering and "FVD collapse". To address this, we propose \textbf{4D-GSW}, a kinematic-aware watermarking framework designed to embed robust copyright information while preserving high spatio-temporal consistency. Unlike prior 4D steganography that primarily focuses on opacity-guided invisibility, our approach explicitly addresses the physical coherence of motion trajectories. We introduce a \textbf{Spatio-Temporal Curvature (STC)} metric to identify "Dynamic Instants," adaptively gating watermark gradient injection to shield critical motion manifolds from non-physical perturbations. To ensure global coherence across complex deformations, we formulate a joint \textbf{HMM-MRF energy minimization} model that synchronizes watermark phases within both temporal trajectories and spatial neighborhoods. Furthermore, an \textbf{anisotropic gradient routing} mechanism ensures that watermark embedding remains strictly decoupled from photometric reconstruction fidelity. Extensive experiments have demonstrated the superior performance of our method in robustly hiding watermarks while resisting various attacks and maintaining high rendering quality and spatiotemporal consistency.
AnySlot: Goal-Conditioned Vision-Language-Action Policies for Zero-Shot Slot-Level Placement
Apr 14, 2026Vision-Language-Action (VLA) policies have emerged as a versatile paradigm for generalist robotic manipulation. However, precise object placement under compositional language instructions remains a major challenge for modern monolithic VLA policies. Slot-level tasks require both reliable slot grounding and sub-centimeter execution accuracy. To this end, we propose AnySlot, a framework that reduces compositional complexity by introducing an explicit spatial visual goal as an intermediate representation between language grounding and control. AnySlot turns language into an explicit visual goal by generating a scene marker, then executes this goal with a goal-conditioned VLA policy. This hierarchical design effectively decouples high-level slot selection from low-level execution, ensuring both semantic accuracy and spatial robustness. Furthermore, recognizing the lack of existing benchmarks for such precision-demanding tasks, we introduce SlotBench, a comprehensive simulation benchmark featuring nine task categories tailored to evaluate structured spatial reasoning in slot-level placement. Extensive experiments show that AnySlot significantly outperforms flat VLA baselines and previous modular grounding methods in zero-shot slot-level placement.
VisNec: Measuring and Leveraging Visual Necessity for Multimodal Instruction Tuning
Mar 01, 2026The effectiveness of multimodal instruction tuning depends not only on dataset scale, but critically on whether training samples genuinely require visual reasoning. However, existing instruction datasets often contain a substantial portion of visually redundant samples (solvable from text alone), as well as multimodally misaligned supervision that can degrade learning. To address this, we propose VisNec (Visual Necessity Score), a principled data selection framework that measures the marginal contribution of visual input during instruction tuning. By comparing predictive loss with and without visual context, VisNec identifies whether a training instance is vision-critical, redundant, or misaligned. To preserve task diversity, we combine VisNec with semantic clustering and select high-necessity samples within each cluster. Across 10 downstream benchmarks, training on only 15% of the LLaVA-665K dataset selected by VisNec achieves 100.2% of full-data performance. On the smaller Vision-Flan-186K dataset, our selection not only further reduces data size but also surpasses full-data training by 15.8%. These results demonstrate that measuring and leveraging visual necessity provides an effective solution for both efficient and robust multimodal instruction tuning. Codes and selected subsets will be released upon acceptance.
FocusTrack: One-Stage Focus-and-Suppress Framework for 3D Point Cloud Object Tracking
Feb 27, 2026In 3D point cloud object tracking, the motion-centric methods have emerged as a promising avenue due to its superior performance in modeling inter-frame motion. However, existing two-stage motion-based approaches suffer from fundamental limitations: (1) error accumulation due to decoupled optimization caused by explicit foreground segmentation prior to motion estimation, and (2) computational bottlenecks from sequential processing. To address these challenges, we propose FocusTrack, a novel one-stage paradigms tracking framework that unifies motion-semantics co-modeling through two core innovations: Inter-frame Motion Modeling (IMM) and Focus-and-Suppress Attention. The IMM module employs a temp-oral-difference siamese encoder to capture global motion patterns between adjacent frames. The Focus-and-Suppress attention that enhance the foreground semantics via motion-salient feature gating and suppress the background noise based on the temporal-aware motion context from IMM without explicit segmentation. Based on above two designs, FocusTrack enables end-to-end training with compact one-stage pipeline. Extensive experiments on prominent 3D tracking benchmarks, such as KITTI, nuScenes, and Waymo, demonstrate that the FocusTrack achieves new SOTA performance while running at a high speed with 105 FPS.
CompTrack: Information Bottleneck-Guided Low-Rank Dynamic Token Compression for Point Cloud Tracking
Nov 19, 20253D single object tracking (SOT) in LiDAR point clouds is a critical task in computer vision and autonomous driving. Despite great success having been achieved, the inherent sparsity of point clouds introduces a dual-redundancy challenge that limits existing trackers: (1) vast spatial redundancy from background noise impairs accuracy, and (2) informational redundancy within the foreground hinders efficiency. To tackle these issues, we propose CompTrack, a novel end-to-end framework that systematically eliminates both forms of redundancy in point clouds. First, CompTrack incorporates a Spatial Foreground Predictor (SFP) module to filter out irrelevant background noise based on information entropy, addressing spatial redundancy. Subsequently, its core is an Information Bottleneck-guided Dynamic Token Compression (IB-DTC) module that eliminates the informational redundancy within the foreground. Theoretically grounded in low-rank approximation, this module leverages an online SVD analysis to adaptively compress the redundant foreground into a compact and highly informative set of proxy tokens. Extensive experiments on KITTI, nuScenes and Waymo datasets demonstrate that CompTrack achieves top-performing tracking performance with superior efficiency, running at a real-time 90 FPS on a single RTX 3090 GPU.
FQ-PETR: Fully Quantized Position Embedding Transformation for Multi-View 3D Object Detection
Nov 14, 2025Camera-based multi-view 3D detection is crucial for autonomous driving. PETR and its variants (PETRs) excel in benchmarks but face deployment challenges due to high computational cost and memory footprint. Quantization is an effective technique for compressing deep neural networks by reducing the bit width of weights and activations. However, directly applying existing quantization methods to PETRs leads to severe accuracy degradation. This issue primarily arises from two key challenges: (1) significant magnitude disparity between multi-modal features-specifically, image features and camera-ray positional embeddings (PE), and (2) the inefficiency and approximation error of quantizing non-linear operators, which commonly rely on hardware-unfriendly computations. In this paper, we propose FQ-PETR, a fully quantized framework for PETRs, featuring three key innovations: (1) Quantization-Friendly LiDAR-ray Position Embedding (QFPE): Replacing multi-point sampling with LiDAR-prior-guided single-point sampling and anchor-based embedding eliminates problematic non-linearities (e.g., inverse-sigmoid) and aligns PE scale with image features, preserving accuracy. (2) Dual-Lookup Table (DULUT): This algorithm approximates complex non-linear functions using two cascaded linear LUTs, achieving high fidelity with minimal entries and no specialized hardware. (3) Quantization After Numerical Stabilization (QANS): Performing quantization after softmax numerical stabilization mitigates attention distortion from large inputs. On PETRs (e.g. PETR, StreamPETR, PETRv2, MV2d), FQ-PETR under W8A8 achieves near-floating-point accuracy (1% degradation) while reducing latency by up to 75%, significantly outperforming existing PTQ and QAT baselines.
MoEQuant: Enhancing Quantization for Mixture-of-Experts Large Language Models via Expert-Balanced Sampling and Affinity Guidance
May 02, 2025



Mixture-of-Experts (MoE) large language models (LLMs), which leverage dynamic routing and sparse activation to enhance efficiency and scalability, have achieved higher performance while reducing computational costs. However, these models face significant memory overheads, limiting their practical deployment and broader adoption. Post-training quantization (PTQ), a widely used method for compressing LLMs, encounters severe accuracy degradation and diminished generalization performance when applied to MoE models. This paper investigates the impact of MoE's sparse and dynamic characteristics on quantization and identifies two primary challenges: (1) Inter-expert imbalance, referring to the uneven distribution of samples across experts, which leads to insufficient and biased calibration for less frequently utilized experts; (2) Intra-expert imbalance, arising from MoE's unique aggregation mechanism, which leads to varying degrees of correlation between different samples and their assigned experts. To address these challenges, we propose MoEQuant, a novel quantization framework tailored for MoE LLMs. MoE-Quant includes two novel techniques: 1) Expert-Balanced Self-Sampling (EBSS) is an efficient sampling method that efficiently constructs a calibration set with balanced expert distributions by leveraging the cumulative probabilities of tokens and expert balance metrics as guiding factors. 2) Affinity-Guided Quantization (AGQ), which incorporates affinities between experts and samples into the quantization process, thereby accurately assessing the impact of individual samples on different experts within the MoE layer. Experiments demonstrate that MoEQuant achieves substantial performance gains (more than 10 points accuracy gain in the HumanEval for DeepSeekMoE-16B under 4-bit quantization) and boosts efficiency.
RWKVQuant: Quantizing the RWKV Family with Proxy Guided Hybrid of Scalar and Vector Quantization
May 02, 2025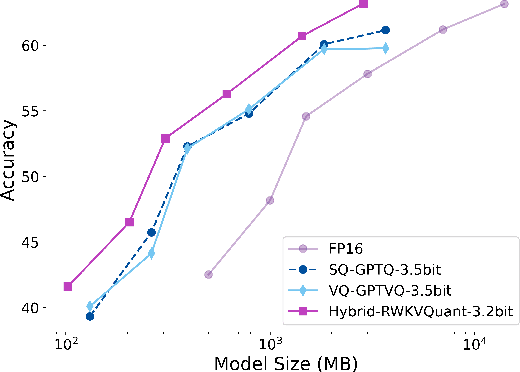
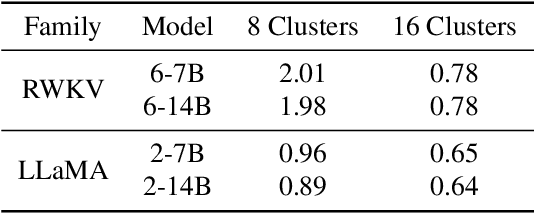
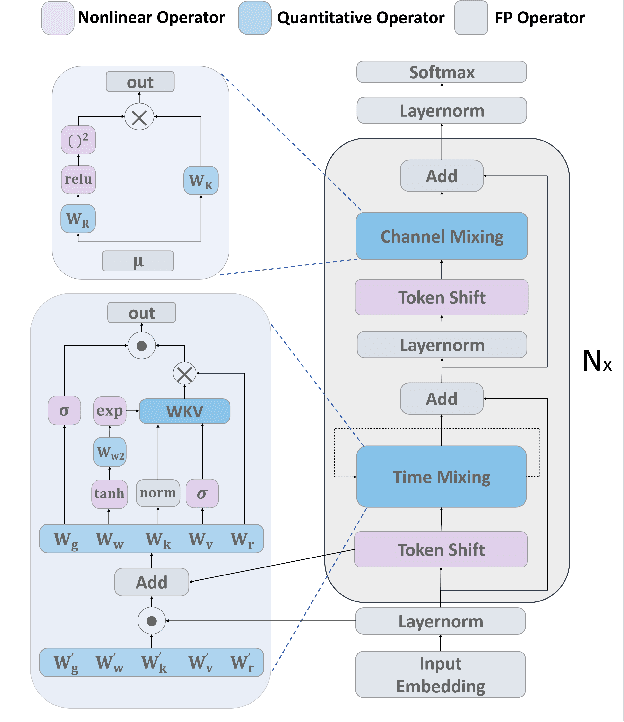
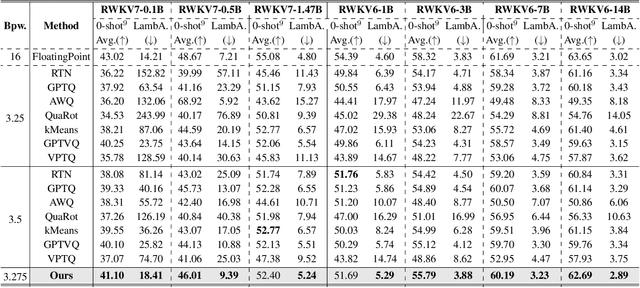
RWKV is a modern RNN architecture with comparable performance to Transformer, but still faces challenges when deployed to resource-constrained devices. Post Training Quantization (PTQ), which is a an essential technique to reduce model size and inference latency, has been widely used in Transformer models. However, it suffers significant degradation of performance when applied to RWKV. This paper investigates and identifies two key constraints inherent in the properties of RWKV: (1) Non-linear operators hinder the parameter-fusion of both smooth- and rotation-based quantization, introducing extra computation overhead. (2) The larger amount of uniformly distributed weights poses challenges for cluster-based quantization, leading to reduced accuracy. To this end, we propose RWKVQuant, a PTQ framework tailored for RWKV models, consisting of two novel techniques: (1) a coarse-to-fine proxy capable of adaptively selecting different quantization approaches by assessing the uniformity and identifying outliers in the weights, and (2) a codebook optimization algorithm that enhances the performance of cluster-based quantization methods for element-wise multiplication in RWKV. Experiments show that RWKVQuant can quantize RWKV-6-14B into about 3-bit with less than 1% accuracy loss and 2.14x speed up.
GSQ-Tuning: Group-Shared Exponents Integer in Fully Quantized Training for LLMs On-Device Fine-tuning
Feb 18, 2025



Large Language Models (LLMs) fine-tuning technologies have achieved remarkable results. However, traditional LLM fine-tuning approaches face significant challenges: they require large Floating Point (FP) computation, raising privacy concerns when handling sensitive data, and are impractical for resource-constrained edge devices. While Parameter-Efficient Fine-Tuning (PEFT) techniques reduce trainable parameters, their reliance on floating-point arithmetic creates fundamental incompatibilities with edge hardware. In this work, we introduce a novel framework for on-device LLM fine-tuning that eliminates the need for floating-point operations in both inference and training, named GSQ-Tuning. At its core is the Group-Shared Exponents Integer format, which efficiently represents model parameters in integer format using shared exponents among parameter groups. When combined with LoRA-like adapters, this enables fully integer-based fine-tuning that is both memory and compute efficient. We demonstrate that our approach achieves accuracy comparable to FP16-based fine-tuning while significantly reducing memory usage (50%). Moreover, compared to FP8, our method can reduce 5x power consumption and 11x chip area with same performance, making large-scale model adaptation feasible on edge devices.
GSRender: Deduplicated Occupancy Prediction via Weakly Supervised 3D Gaussian Splatting
Dec 19, 2024



3D occupancy perception is gaining increasing attention due to its capability to offer detailed and precise environment representations. Previous weakly-supervised NeRF methods balance efficiency and accuracy, with mIoU varying by 5-10 points due to sampling count along camera rays. Recently, real-time Gaussian splatting has gained widespread popularity in 3D reconstruction, and the occupancy prediction task can also be viewed as a reconstruction task. Consequently, we propose GSRender, which naturally employs 3D Gaussian Splatting for occupancy prediction, simplifying the sampling process. In addition, the limitations of 2D supervision result in duplicate predictions along the same camera ray. We implemented the Ray Compensation (RC) module, which mitigates this issue by compensating for features from adjacent frames. Finally, we redesigned the loss to eliminate the impact of dynamic objects from adjacent frames. Extensive experiments demonstrate that our approach achieves SOTA (state-of-the-art) results in RayIoU (+6.0), while narrowing the gap with 3D supervision methods. Our code will be released soon.