 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGoing Beyond Linear RL: Sample Efficient Neural Function Approximation
Jul 14, 2021
Deep Reinforcement Learning (RL) powered by neural net approximation of the Q function has had enormous empirical success. While the theory of RL has traditionally focused on linear function approximation (or eluder dimension) approaches, little is known about nonlinear RL with neural net approximations of the Q functions. This is the focus of this work, where we study function approximation with two-layer neural networks (considering both ReLU and polynomial activation functions). Our first result is a computationally and statistically efficient algorithm in the generative model setting under completeness for two-layer neural networks. Our second result considers this setting but under only realizability of the neural net function class. Here, assuming deterministic dynamics, the sample complexity scales linearly in the algebraic dimension. In all cases, our results significantly improve upon what can be attained with linear (or eluder dimension) methods.
Optimal Gradient-based Algorithms for Non-concave Bandit Optimization
Jul 09, 2021
Bandit problems with linear or concave reward have been extensively studied, but relatively few works have studied bandits with non-concave reward. This work considers a large family of bandit problems where the unknown underlying reward function is non-concave, including the low-rank generalized linear bandit problems and two-layer neural network with polynomial activation bandit problem. For the low-rank generalized linear bandit problem, we provide a minimax-optimal algorithm in the dimension, refuting both conjectures in [LMT21, JWWN19]. Our algorithms are based on a unified zeroth-order optimization paradigm that applies in great generality and attains optimal rates in several structured polynomial settings (in the dimension). We further demonstrate the applicability of our algorithms in RL in the generative model setting, resulting in improved sample complexity over prior approaches. Finally, we show that the standard optimistic algorithms (e.g., UCB) are sub-optimal by dimension factors. In the neural net setting (with polynomial activation functions) with noiseless reward, we provide a bandit algorithm with sample complexity equal to the intrinsic algebraic dimension. Again, we show that optimistic approaches have worse sample complexity, polynomial in the extrinsic dimension (which could be exponentially worse in the polynomial degree).
A Short Note on the Relationship of Information Gain and Eluder Dimension
Jul 06, 2021Eluder dimension and information gain are two widely used methods of complexity measures in bandit and reinforcement learning. Eluder dimension was originally proposed as a general complexity measure of function classes, but the common examples of where it is known to be small are function spaces (vector spaces). In these cases, the primary tool to upper bound the eluder dimension is the elliptic potential lemma. Interestingly, the elliptic potential lemma also features prominently in the analysis of linear bandits/reinforcement learning and their nonparametric generalization, the information gain. We show that this is not a coincidence -- eluder dimension and information gain are equivalent in a precise sense for reproducing kernel Hilbert spaces.
Benign Overfitting of Constant-Stepsize SGD for Linear Regression
Mar 23, 2021
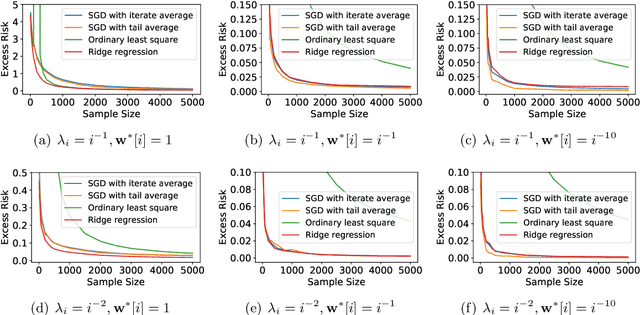
There is an increasing realization that algorithmic inductive biases are central in preventing overfitting; empirically, we often see a benign overfitting phenomenon in overparameterized settings for natural learning algorithms, such as stochastic gradient descent (SGD), where little to no explicit regularization has been employed. This work considers this issue in arguably the most basic setting: constant-stepsize SGD (with iterate averaging) for linear regression in the overparameterized regime. Our main result provides a sharp excess risk bound, stated in terms of the full eigenspectrum of the data covariance matrix, that reveals a bias-variance decomposition characterizing when generalization is possible: (i) the variance bound is characterized in terms of an effective dimension (specific for SGD) and (ii) the bias bound provides a sharp geometric characterization in terms of the location of the initial iterate (and how it aligns with the data covariance matrix). We reflect on a number of notable differences between the algorithmic regularization afforded by (unregularized) SGD in comparison to ordinary least squares (minimum-norm interpolation) and ridge regression.
An Exponential Lower Bound for Linearly-Realizable MDPs with Constant Suboptimality Gap
Mar 23, 2021
A fundamental question in the theory of reinforcement learning is: suppose the optimal $Q$-function lies in the linear span of a given $d$ dimensional feature mapping, is sample-efficient reinforcement learning (RL) possible? The recent and remarkable result of Weisz et al. (2020) resolved this question in the negative, providing an exponential (in $d$) sample size lower bound, which holds even if the agent has access to a generative model of the environment. One may hope that this information theoretic barrier for RL can be circumvented by further supposing an even more favorable assumption: there exists a \emph{constant suboptimality gap} between the optimal $Q$-value of the best action and that of the second-best action (for all states). The hope is that having a large suboptimality gap would permit easier identification of optimal actions themselves, thus making the problem tractable; indeed, provided the agent has access to a generative model, sample-efficient RL is in fact possible with the addition of this more favorable assumption. This work focuses on this question in the standard online reinforcement learning setting, where our main result resolves this question in the negative: our hardness result shows that an exponential sample complexity lower bound still holds even if a constant suboptimality gap is assumed in addition to having a linearly realizable optimal $Q$-function. Perhaps surprisingly, this implies an exponential separation between the online RL setting and the generative model setting. Complementing our negative hardness result, we give two positive results showing that provably sample-efficient RL is possible either under an additional low-variance assumption or under a novel hypercontractivity assumption (both implicitly place stronger conditions on the underlying dynamics model).
Bilinear Classes: A Structural Framework for Provable Generalization in RL
Mar 19, 2021
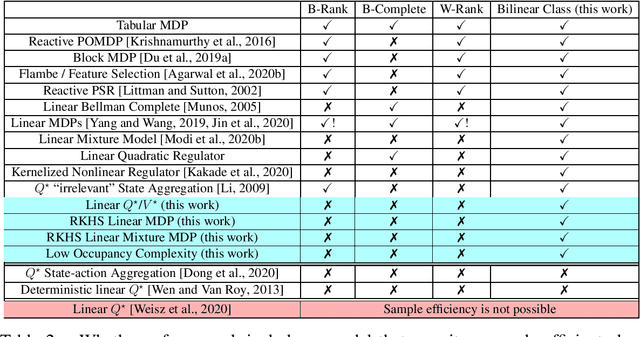
This work introduces Bilinear Classes, a new structural framework, which permit generalization in reinforcement learning in a wide variety of settings through the use of function approximation. The framework incorporates nearly all existing models in which a polynomial sample complexity is achievable, and, notably, also includes new models, such as the Linear $Q^*/V^*$ model in which both the optimal $Q$-function and the optimal $V$-function are linear in some known feature space. Our main result provides an RL algorithm which has polynomial sample complexity for Bilinear Classes; notably, this sample complexity is stated in terms of a reduction to the generalization error of an underlying supervised learning sub-problem. These bounds nearly match the best known sample complexity bounds for existing models. Furthermore, this framework also extends to the infinite dimensional (RKHS) setting: for the the Linear $Q^*/V^*$ model, linear MDPs, and linear mixture MDPs, we provide sample complexities that have no explicit dependence on the explicit feature dimension (which could be infinite), but instead depends only on information theoretic quantities.
Instabilities of Offline RL with Pre-Trained Neural Representation
Mar 08, 2021

In offline reinforcement learning (RL), we seek to utilize offline data to evaluate (or learn) policies in scenarios where the data are collected from a distribution that substantially differs from that of the target policy to be evaluated. Recent theoretical advances have shown that such sample-efficient offline RL is indeed possible provided certain strong representational conditions hold, else there are lower bounds exhibiting exponential error amplification (in the problem horizon) unless the data collection distribution has only a mild distribution shift relative to the target policy. This work studies these issues from an empirical perspective to gauge how stable offline RL methods are. In particular, our methodology explores these ideas when using features from pre-trained neural networks, in the hope that these representations are powerful enough to permit sample efficient offline RL. Through extensive experiments on a range of tasks, we see that substantial error amplification does occur even when using such pre-trained representations (trained on the same task itself); we find offline RL is stable only under extremely mild distribution shift. The implications of these results, both from a theoretical and an empirical perspective, are that successful offline RL (where we seek to go beyond the low distribution shift regime) requires substantially stronger conditions beyond those which suffice for successful supervised learning.
What are the Statistical Limits of Offline RL with Linear Function Approximation?
Oct 22, 2020
Offline reinforcement learning seeks to utilize offline (observational) data to guide the learning of (causal) sequential decision making strategies. The hope is that offline reinforcement learning coupled with function approximation methods (to deal with the curse of dimensionality) can provide a means to help alleviate the excessive sample complexity burden in modern sequential decision making problems. However, the extent to which this broader approach can be effective is not well understood, where the literature largely consists of sufficient conditions. This work focuses on the basic question of what are necessary representational and distributional conditions that permit provable sample-efficient offline reinforcement learning. Perhaps surprisingly, our main result shows that even if: i) we have realizability in that the true value function of \emph{every} policy is linear in a given set of features and 2) our off-policy data has good coverage over all features (under a strong spectral condition), then any algorithm still (information-theoretically) requires a number of offline samples that is exponential in the problem horizon in order to non-trivially estimate the value of \emph{any} given policy. Our results highlight that sample-efficient offline policy evaluation is simply not possible unless significantly stronger conditions hold; such conditions include either having low distribution shift (where the offline data distribution is close to the distribution of the policy to be evaluated) or significantly stronger representational conditions (beyond realizability).
Model-Based Multi-Agent RL in Zero-Sum Markov Games with Near-Optimal Sample Complexity
Jul 15, 2020
Model-based reinforcement learning (RL), which finds an optimal policy using an empirical model, has long been recognized as one of the corner stones of RL. It is especially suitable for multi-agent RL (MARL), as it naturally decouples the learning and the planning phases, and avoids the non-stationarity problem when all agents are improving their policies simultaneously using samples. Though intuitive, easy-to-implement, and widely-used, the sample complexity of model-based MARL algorithms has not been fully investigated. In this paper, our goal is to address the fundamental question about its sample complexity. We study arguably the most basic MARL setting: two-player discounted zero-sum Markov games, given only access to a generative model. We show that model-based MARL achieves a sample complexity of $\tilde O(|S||A||B|(1-\gamma)^{-3}\epsilon^{-2})$ for finding the Nash equilibrium (NE) value up to some $\epsilon$ error, and the $\epsilon$-NE policies with a smooth planning oracle, where $\gamma$ is the discount factor, and $S,A,B$ denote the state space, and the action spaces for the two agents. We further show that such a sample bound is minimax-optimal (up to logarithmic factors) if the algorithm is reward-agnostic, where the algorithm queries state transition samples without reward knowledge, by establishing a matching lower bound. This is in contrast to the usual reward-aware setting, with a $\tilde\Omega(|S|(|A|+|B|)(1-\gamma)^{-3}\epsilon^{-2})$ lower bound, where this model-based approach is near-optimal with only a gap on the $|A|,|B|$ dependence. Our results not only demonstrate the sample-efficiency of this basic model-based approach in MARL, but also elaborate on the fundamental tradeoff between its power (easily handling the more challenging reward-agnostic case) and limitation (less adaptive and suboptimal in $|A|,|B|$), particularly arises in the multi-agent context.
Sample-Efficient Reinforcement Learning of Undercomplete POMDPs
Jun 22, 2020Partial observability is a common challenge in many reinforcement learning applications, which requires an agent to maintain memory, infer latent states, and integrate this past information into exploration. This challenge leads to a number of computational and statistical hardness results for learning general Partially Observable Markov Decision Processes (POMDPs). This work shows that these hardness barriers do not preclude efficient reinforcement learning for rich and interesting subclasses of POMDPs. In particular, we present a sample-efficient algorithm, OOM-UCB, for episodic finite undercomplete POMDPs, where the number of observations is larger than the number of latent states and where exploration is essential for learning, thus distinguishing our results from prior works. OOM-UCB achieves an optimal sample complexity of $O(1/\epsilon^2)$ for finding an $\epsilon$-optimal policy, along with being polynomial in all other relevant quantities. As an interesting special case, we also provide a computationally and statistically efficient algorithm for POMDPs with deterministic state transitions.