 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRefining Perception Contracts: Case Studies in Vision-based Safe Auto-landing
Nov 15, 2023



Perception contracts provide a method for evaluating safety of control systems that use machine learning for perception. A perception contract is a specification for testing the ML components, and it gives a method for proving end-to-end system-level safety requirements. The feasibility of contract-based testing and assurance was established earlier in the context of straight lane keeping: a 3-dimensional system with relatively simple dynamics. This paper presents the analysis of two 6 and 12-dimensional flight control systems that use multi-stage, heterogeneous, ML-enabled perception. The paper advances methodology by introducing an algorithm for constructing data and requirement guided refinement of perception contracts (DaRePC). The resulting analysis provides testable contracts which establish the state and environment conditions under which an aircraft can safety touchdown on the runway and a drone can safely pass through a sequence of gates. It can also discover conditions (e.g., low-horizon sun) that can possibly violate the safety of the vision-based control system.
Searching for Optimal Runtime Assurance via Reachability and Reinforcement Learning
Oct 06, 2023A runtime assurance system (RTA) for a given plant enables the exercise of an untrusted or experimental controller while assuring safety with a backup (or safety) controller. The relevant computational design problem is to create a logic that assures safety by switching to the safety controller as needed, while maximizing some performance criteria, such as the utilization of the untrusted controller. Existing RTA design strategies are well-known to be overly conservative and, in principle, can lead to safety violations. In this paper, we formulate the optimal RTA design problem and present a new approach for solving it. Our approach relies on reward shaping and reinforcement learning. It can guarantee safety and leverage machine learning technologies for scalability. We have implemented this algorithm and present experimental results comparing our approach with state-of-the-art reachability and simulation-based RTA approaches in a number of scenarios using aircraft models in 3D space with complex safety requirements. Our approach can guarantee safety while increasing utilization of the experimental controller over existing approaches.
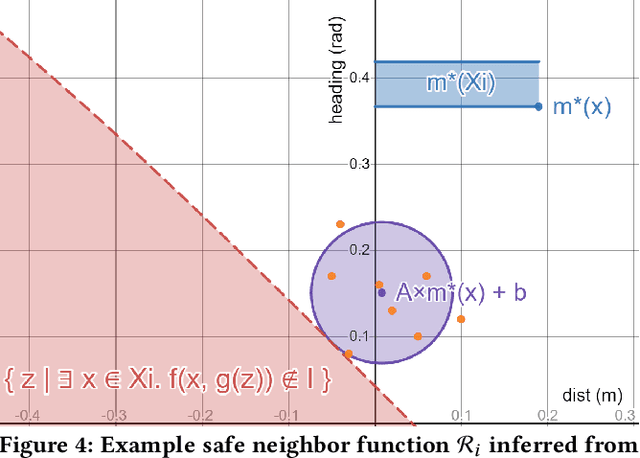
Learning-based Perception Contracts and Applications
Sep 24, 2023Perception modules are integral in many modern autonomous systems, but their accuracy can be subject to the vagaries of the environment. In this paper, we propose a learning-based approach that can automatically characterize the error of a perception module from data and use this for safe control. The proposed approach constructs a {\em perception contract (PC)\/} which generates a set that contains the ground-truth value that is being estimated by the perception module, with high probability. We apply the proposed approach to study a vision pipeline deployed on a quadcopter. With the proposed approach, we successfully constructed a PC for the vision pipeline. We then designed a control algorithm that utilizes the learned PC, with the goal of landing the quadcopter safely on a landing pad. Experiments show that with the learned PC, the control algorithm safely landed the quadcopter despite the error from the perception module, while the baseline algorithm without using the learned PC failed to do so.
ChatGPT -- a Blessing or a Curse for Undergraduate Computer Science Students and Instructors?
Apr 28, 2023

ChatGPT is an AI language model developed by OpenAI that can understand and generate human-like text. It can be used for a variety of use cases such as language generation, question answering, text summarization, chatbot development, language translation, sentiment analysis, content creation, personalization, text completion, and storytelling. While ChatGPT has garnered significant positive attention, it has also generated a sense of apprehension and uncertainty in academic circles. There is concern that students may leverage ChatGPT to complete take-home assignments and exams and obtain favorable grades without genuinely acquiring knowledge. This paper adopts a quantitative approach to demonstrate ChatGPT's high degree of unreliability in answering a diverse range of questions pertaining to topics in undergraduate computer science. Our analysis shows that students may risk self-sabotage by blindly depending on ChatGPT to complete assignments and exams. We build upon this analysis to provide constructive recommendations to both students and instructors.
Assuring safety of vision-based swarm formation control
Oct 03, 2022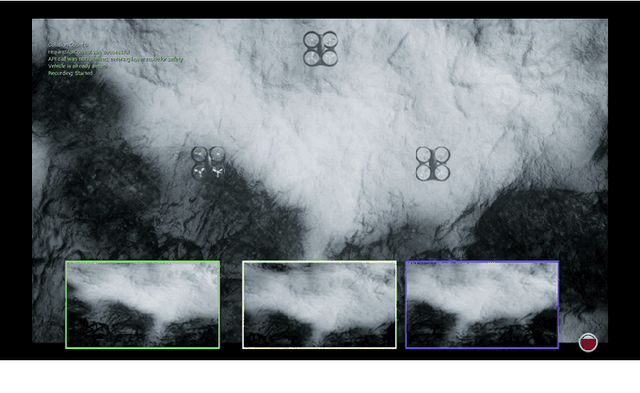
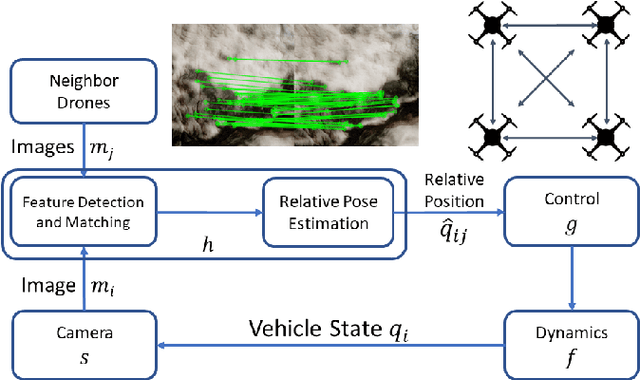
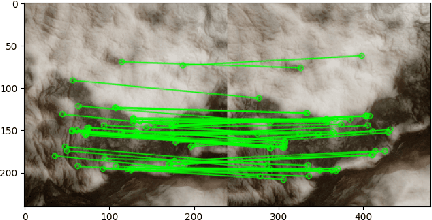
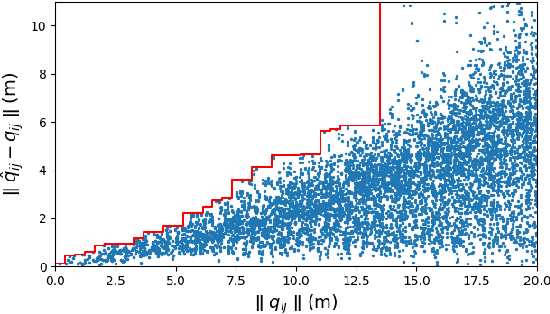
Vision-based formation control systems recently have attracted attentions from both the research community and the industry for its applicability in GPS-denied environments. The safety assurance for such systems is challenging due to the lack of formal specifications for computer vision systems and the complex impact of imprecise estimations on distributed control. We propose a technique for safety assurance of vision-based formation control. Our technique combines (1) the construction of a piecewise approximation of the worst-case error of perception and (2) a classical Lyapunov-based safety analysis of the consensus control algorithm. The analysis provides the ultimate bound on the relative distance between drones. This ultimate bound can then be used to guarantee safe separation of all drones. We implement an instance of the vision-based control system on top of the photo-realistic AirSim simulator. We construct the piecewise approximation for varying perception error under different environments and weather conditions, and we are able to validate the safe separation provided by our analysis across the different weather conditions with AirSim simulation.
Learning Certifiably Robust Controllers Using Fragile Perception
Sep 22, 2022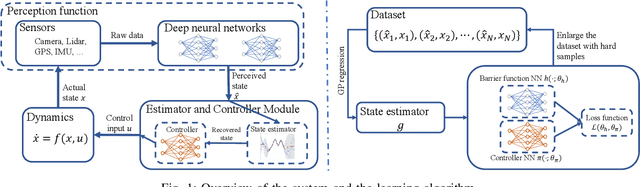
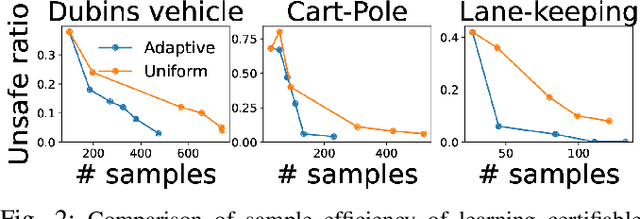
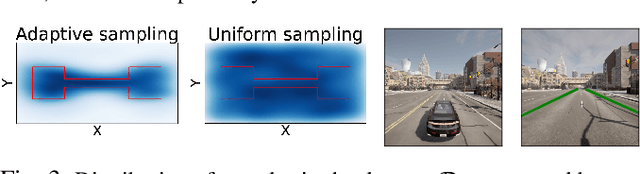
Advances in computer vision and machine learning enable robots to perceive their surroundings in powerful new ways, but these perception modules have well-known fragilities. We consider the problem of synthesizing a safe controller that is robust despite perception errors. The proposed method constructs a state estimator based on Gaussian processes with input-dependent noises. This estimator computes a high-confidence set for the actual state given a perceived state. Then, a robust neural network controller is synthesized that can provably handle the state uncertainty. Furthermore, an adaptive sampling algorithm is proposed to jointly improve the estimator and controller. Simulation experiments, including a realistic vision-based lane-keeping example in CARLA, illustrate the promise of the proposed approach in synthesizing robust controllers with deep-learning-based perception.
Estimating Uncertainty of Autonomous Vehicle Systems with Generalized Polynomial Chaos
Aug 09, 2022
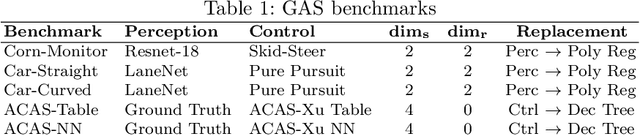
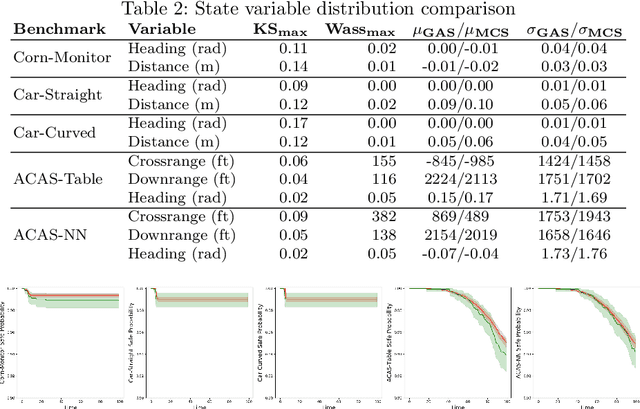
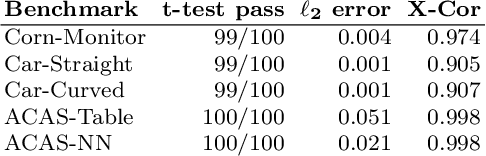
Modern autonomous vehicle systems use complex perception and control components and must cope with uncertain data received from sensors. To estimate the probability that such vehicles remain in a safe state, developers often resort to time-consuming simulation methods. This paper presents an alternative methodology for analyzing autonomy pipelines in vehicular systems, based on Generalized Polynomial Chaos (GPC). We also present GAS, the first algorithm for creating and using GPC models of complex vehicle systems. GAS replaces complex perception components with a perception model to reduce complexity. Then, it constructs the GPC model and uses it for estimating state distribution and/or probability of entering an unsafe state. We evaluate GAS on five scenarios used in crop management vehicles, self driving cars, and aerial drones - each system uses at least one complex perception or control component. We show that GAS calculates state distributions that closely match those produced by Monte Carlo Simulation, while also providing 2.3x-3.0x speedups.
Multi-agent Motion Planning from Signal Temporal Logic Specifications
Jan 13, 2022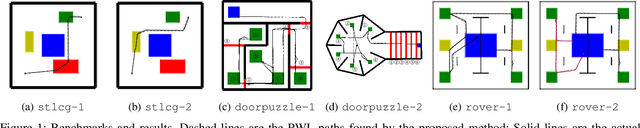
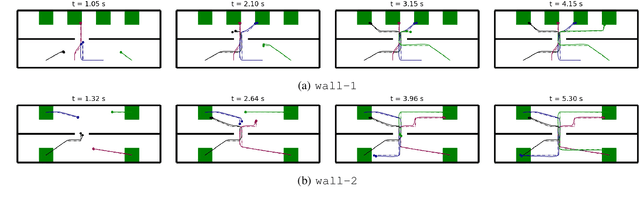
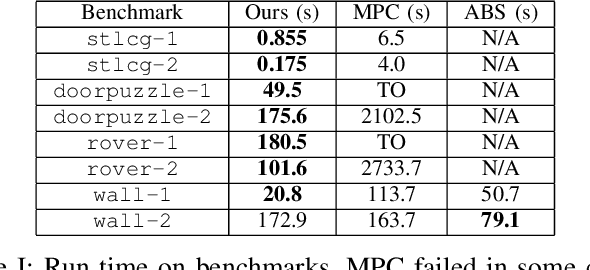
We tackle the challenging problem of multi-agent cooperative motion planning for complex tasks described using signal temporal logic (STL), where robots can have nonlinear and nonholonomic dynamics. Existing methods in multi-agent motion planning, especially those based on discrete abstractions and model predictive control (MPC), suffer from limited scalability with respect to the complexity of the task, the size of the workspace, and the planning horizon. We present a method based on {\em timed waypoints\/} to address this issue. We show that timed waypoints can help abstract nonlinear behaviors of the system as safety envelopes around the reference path defined by those waypoints. Then the search for waypoints satisfying the STL specifications can be inductively encoded as a mixed-integer linear program. The agents following the synthesized timed waypoints have their tasks automatically allocated, and are guaranteed to satisfy the STL specifications while avoiding collisions. We evaluate the algorithm on a wide variety of benchmarks. Results show that it supports multi-agent planning from complex specification over long planning horizons, and significantly outperforms state-of-the-art abstraction-based and MPC-based motion planning methods. The implementation is available at https://github.com/sundw2014/STLPlanning.
Verifying Controllers with Convolutional Neural Network-based Perception: A Case for Intelligible, Safe, and Precise Abstractions
Nov 10, 2021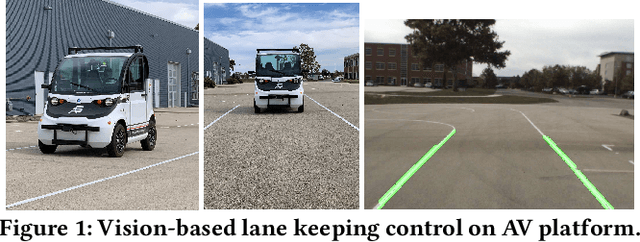
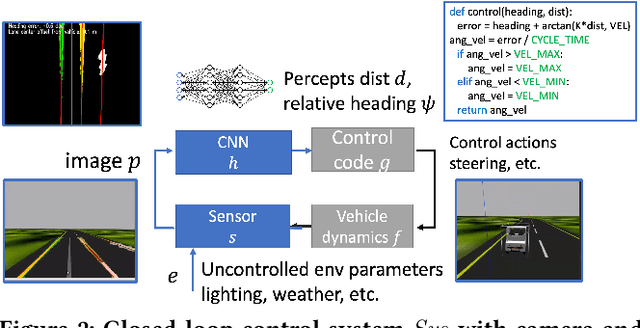
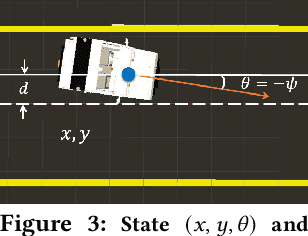
Convolutional Neural Networks (CNN) for object detection, lane detection, and segmentation now sit at the head of most autonomy pipelines, and yet, their safety analysis remains an important challenge. Formal analysis of perception models is fundamentally difficult because their correctness is hard if not impossible to specify. We present a technique for inferring intelligible and safe abstractions for perception models from system-level safety requirements, data, and program analysis of the modules that are downstream from perception. The technique can help tradeoff safety, size, and precision, in creating abstractions and the subsequent verification. We apply the method to two significant case studies based on high-fidelity simulations (a) a vision-based lane keeping controller for an autonomous vehicle and (b) a controller for an agricultural robot. We show how the generated abstractions can be composed with the downstream modules and then the resulting abstract system can be verified using program analysis tools like CBMC. Detailed evaluations of the impacts of size, safety requirements, and the environmental parameters (e.g., lighting, road surface, plant type) on the precision of the generated abstractions suggest that the approach can help guide the search for corner cases and safe operating envelops.
SymAR: Symmetry Abstractions and Refinement for Accelerating Scenarios with Neural Network Controllers Verification
Nov 21, 2020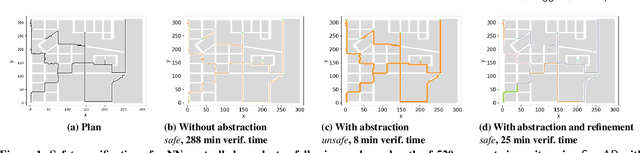
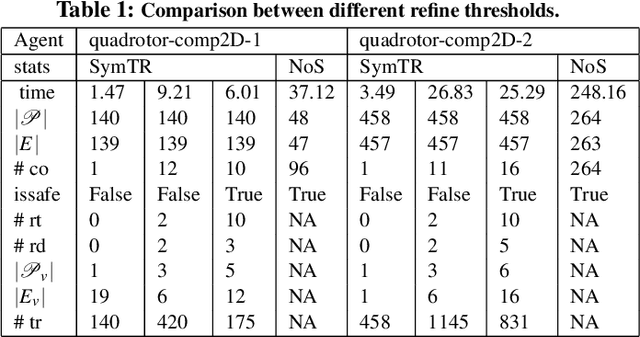
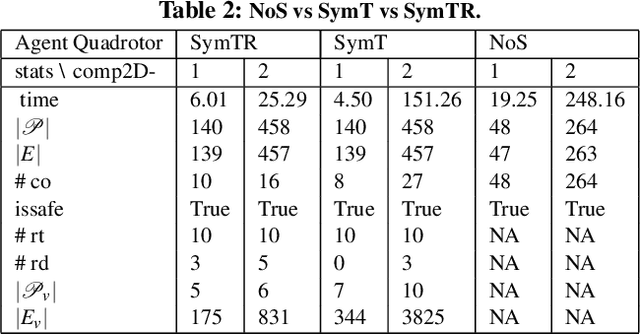
We present a Symmetry-based abstraction refinement algorithm SymAR that is directed towards safety verification of large-scale scenarios with complex dynamical systems. The abstraction maps modes with symmetric dynamics to a single abstract mode and refinements recursively split the modes when safety checks fail. We show how symmetry abstractions can be applied effectively to closed-loop control systems, including non-symmetric deep neural network (DNN) controllers. For such controllers, we transform their inputs and outputs to enforce symmetry and make the closed loop system amenable for abstraction. We implemented SymAR in Python and used it to verify paths with 100s of segments in 2D and 3D scenarios followed by a six dimensional DNN-controlled quadrotor, and also a ground vehicle. Our experiments show significant savings, up to 10x in some cases, in verification time over existing methods.