 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning-guided Prioritized Planning for Lifelong Multi-Agent Path Finding in Warehouse Automation
Mar 25, 2026Lifelong Multi-Agent Path Finding (MAPF) is critical for modern warehouse automation, which requires multiple robots to continuously navigate conflict-free paths to optimize the overall system throughput. However, the complexity of warehouse environments and the long-term dynamics of lifelong MAPF often demand costly adaptations to classical search-based solvers. While machine learning methods have been explored, their superiority over search-based methods remains inconclusive. In this paper, we introduce Reinforcement Learning (RL) guided Rolling Horizon Prioritized Planning (RL-RH-PP), the first framework integrating RL with search-based planning for lifelong MAPF. Specifically, we leverage classical Prioritized Planning (PP) as a backbone for its simplicity and flexibility in integrating with a learning-based priority assignment policy. By formulating dynamic priority assignment as a Partially Observable Markov Decision Process (POMDP), RL-RH-PP exploits the sequential decision-making nature of lifelong planning while delegating complex spatial-temporal interactions among agents to reinforcement learning. An attention-based neural network autoregressively decodes priority orders on-the-fly, enabling efficient sequential single-agent planning by the PP planner. Evaluations in realistic warehouse simulations show that RL-RH-PP achieves the highest total throughput among baselines and generalizes effectively across agent densities, planning horizons, and warehouse layouts. Our interpretive analyses reveal that RL-RH-PP proactively prioritizes congested agents and strategically redirects agents from congestion, easing traffic flow and boosting throughput. These findings highlight the potential of learning-guided approaches to augment traditional heuristics in modern warehouse automation.
Lifelong Scalable Multi-Agent Realistic Testbed and A Comprehensive Study on Design Choices in Lifelong AGV Fleet Management Systems
Feb 17, 2026We present Lifelong Scalable Multi-Agent Realistic Testbed (LSMART), an open-source simulator to evaluate any Multi-Agent Path Finding (MAPF) algorithm in a Fleet Management System (FMS) with Automated Guided Vehicles (AGVs). MAPF aims to move a group of agents from their corresponding starting locations to their goals. Lifelong MAPF (LMAPF) is a variant of MAPF that continuously assigns new goals for agents to reach. LMAPF applications, such as autonomous warehouses, often require a centralized, lifelong system to coordinate the movement of a fleet of robots, typically AGVs. However, existing works on MAPF and LMAPF often assume simplified kinodynamic models, such as pebble motion, as well as perfect execution and communication for AGVs. Prior work has presented SMART, a software capable of evaluating any MAPF algorithms while considering agent kinodynamics, communication delays, and execution uncertainties. However, SMART is designed for MAPF, not LMAPF. Generalizing SMART to an FMS requires many more design choices. First, an FMS parallelizes planning and execution, raising the question of when to plan. Second, given planners with varying optimality and differing agent-model assumptions, one must decide how to plan. Third, when the planner fails to return valid solutions, the system must determine how to recover. In this paper, we first present LSMART, an open-source simulator that incorporates all these considerations to evaluate any MAPF algorithms in an FMS. We then provide experiment results based on state-of-the-art methods for each design choice, offering guidance on how to effectively design centralized lifelong AGV Fleet Management Systems. LSMART is available at https://smart-mapf.github.io/lifelong-smart.
Learning-based Motion Planning in Dynamic Environments Using GNNs and Temporal Encoding
Oct 16, 2022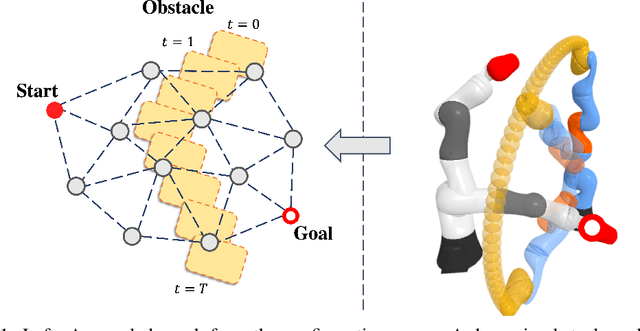
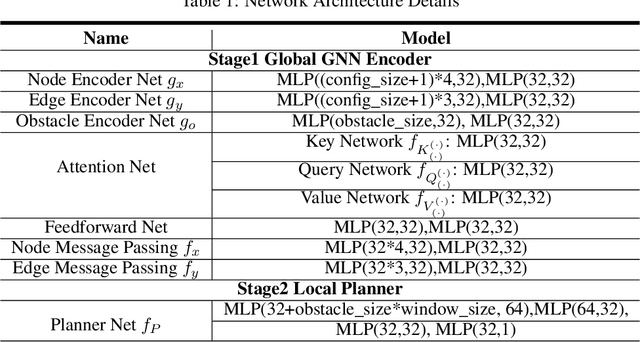
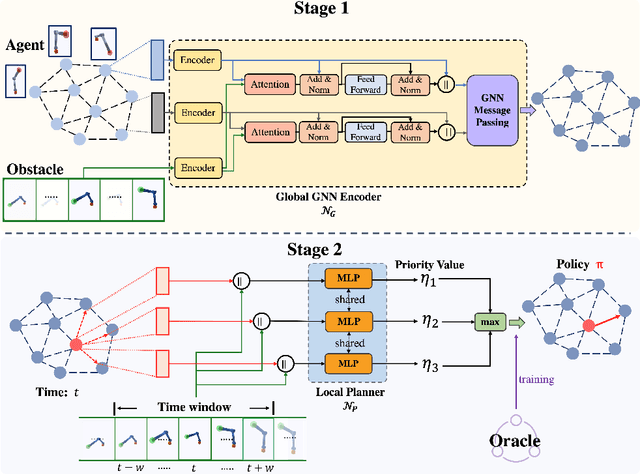
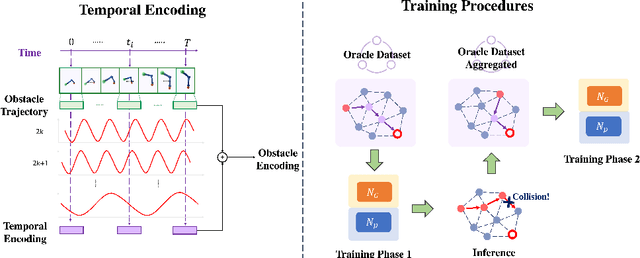
Learning-based methods have shown promising performance for accelerating motion planning, but mostly in the setting of static environments. For the more challenging problem of planning in dynamic environments, such as multi-arm assembly tasks and human-robot interaction, motion planners need to consider the trajectories of the dynamic obstacles and reason about temporal-spatial interactions in very large state spaces. We propose a GNN-based approach that uses temporal encoding and imitation learning with data aggregation for learning both the embeddings and the edge prioritization policies. Experiments show that the proposed methods can significantly accelerate online planning over state-of-the-art complete dynamic planning algorithms. The learned models can often reduce costly collision checking operations by more than 1000x, and thus accelerating planning by up to 95%, while achieving high success rates on hard instances as well.
Cooperative Task and Motion Planning for Multi-Arm Assembly Systems
Mar 04, 2022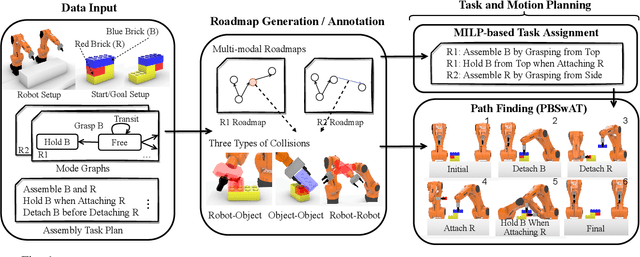
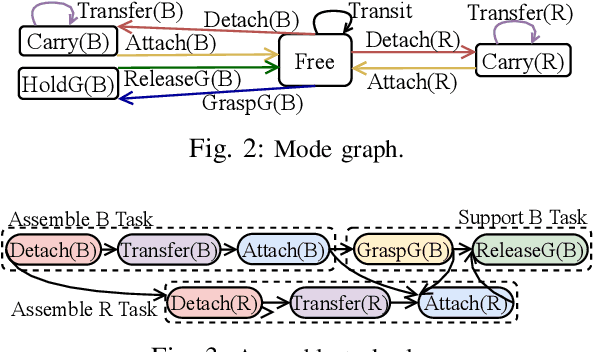
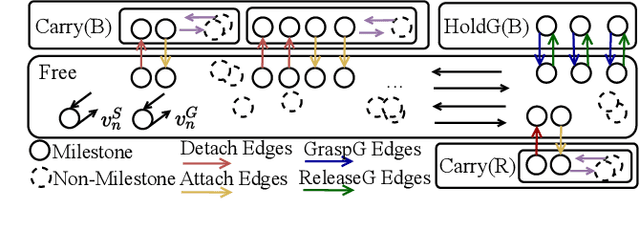
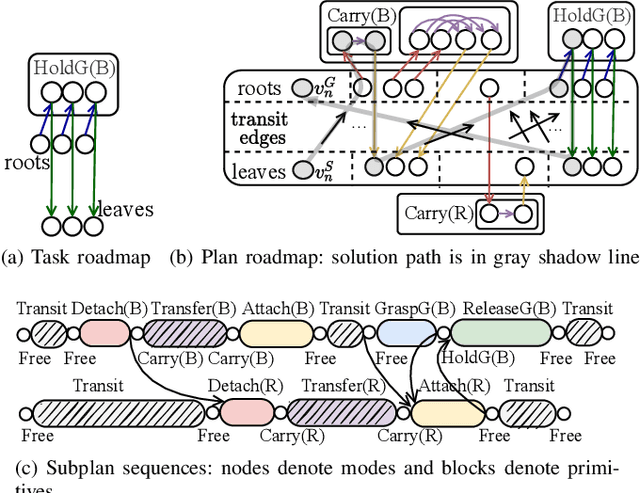
Multi-robot assembly systems are becoming increasingly appealing in manufacturing due to their ability to automatically, flexibly, and quickly construct desired structural designs. However, effectively planning for these systems in a manner that ensures each robot is simultaneously productive, and not idle, is challenging due to (1) the close proximity that the robots must operate in to manipulate the structure and (2) the inherent structural partial orderings on when each part can be installed. In this paper, we present a task and motion planning framework that jointly plans safe, low-makespan plans for a team of robots to assemble complex spatial structures. Our framework takes a hierarchical approach that, at the high level, uses Mixed-integer Linear Programs to compute an abstract plan comprised of an allocation of robots to tasks subject to precedence constraints and, at the low level, builds on a state-of-the-art algorithm for Multi-Agent Path Finding to plan collision-free robot motions that realize this abstract plan. Critical to our approach is the inclusion of certain collision constraints and movement durations during high-level planning, which better informs the search for abstract plans that are likely to be both feasible and low-makespan while keeping the search tractable. We demonstrate our planning system on several challenging assembly domains with several (sometimes heterogeneous) robots with grippers or suction plates for assembling structures with up to 23 objects involving Lego bricks, bars, plates, or irregularly shaped blocks.
Multi-agent Motion Planning from Signal Temporal Logic Specifications
Jan 13, 2022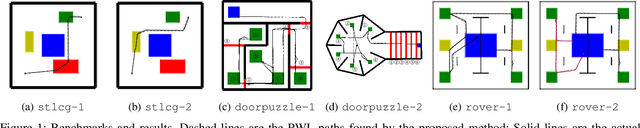
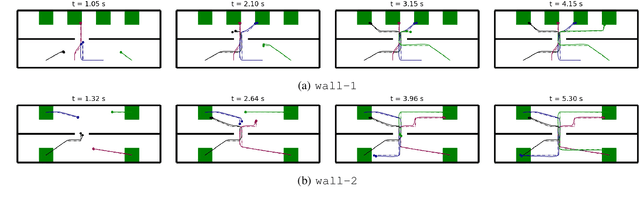
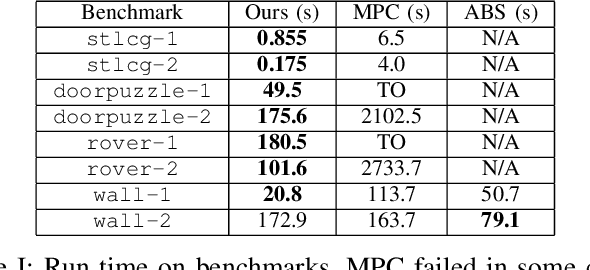
We tackle the challenging problem of multi-agent cooperative motion planning for complex tasks described using signal temporal logic (STL), where robots can have nonlinear and nonholonomic dynamics. Existing methods in multi-agent motion planning, especially those based on discrete abstractions and model predictive control (MPC), suffer from limited scalability with respect to the complexity of the task, the size of the workspace, and the planning horizon. We present a method based on {\em timed waypoints\/} to address this issue. We show that timed waypoints can help abstract nonlinear behaviors of the system as safety envelopes around the reference path defined by those waypoints. Then the search for waypoints satisfying the STL specifications can be inductively encoded as a mixed-integer linear program. The agents following the synthesized timed waypoints have their tasks automatically allocated, and are guaranteed to satisfy the STL specifications while avoiding collisions. We evaluate the algorithm on a wide variety of benchmarks. Results show that it supports multi-agent planning from complex specification over long planning horizons, and significantly outperforms state-of-the-art abstraction-based and MPC-based motion planning methods. The implementation is available at https://github.com/sundw2014/STLPlanning.
Generalized Conflict-directed Search for Optimal Ordering Problems
Mar 31, 2021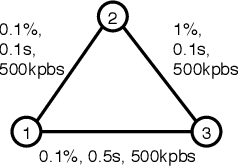

Solving planning and scheduling problems for multiple tasks with highly coupled state and temporal constraints is notoriously challenging. An appealing approach to effectively decouple the problem is to judiciously order the events such that decisions can be made over sequences of tasks. As many problems encountered in practice are over-constrained, we must instead find relaxed solutions in which certain requirements are dropped. This motivates a formulation of optimality with respect to the costs of relaxing constraints and the problem of finding an optimal ordering under which this relaxing cost is minimum. In this paper, we present Generalized Conflict-directed Ordering (GCDO), a branch-and-bound ordering method that generates an optimal total order of events by leveraging the generalized conflicts of both inconsistency and suboptimality from sub-solvers for cost estimation and solution space pruning. Due to its ability to reason over generalized conflicts, GCDO is much more efficient in finding high-quality total orders than the previous conflict-directed approach CDITO. We demonstrate this by benchmarking on temporal network configuration problems, which involves managing networks over time and makes necessary tradeoffs between network flows against CDITO and Mixed Integer-Linear Programing (MILP). Our algorithm is able to solve two orders of magnitude more benchmark problems to optimality and twice the problems compared to CDITO and MILP within a runtime limit, respectively.
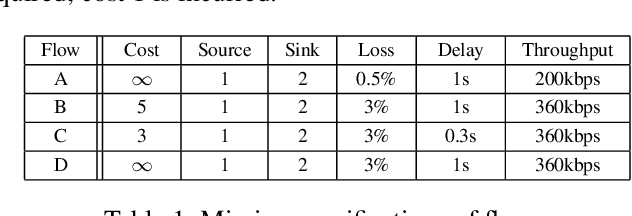
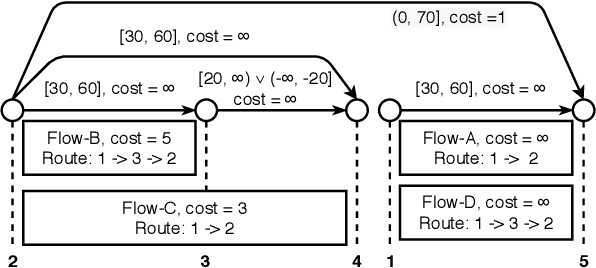
Optimal Mixed Discrete-Continuous Planning for Linear Hybrid Systems
Feb 20, 2021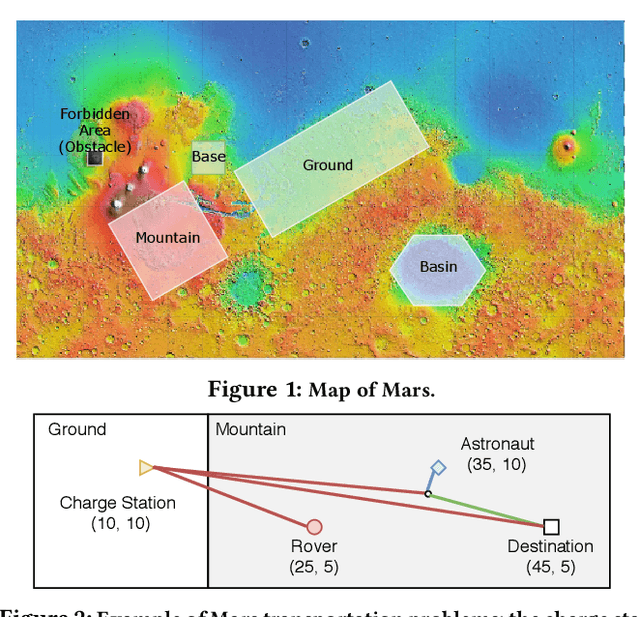
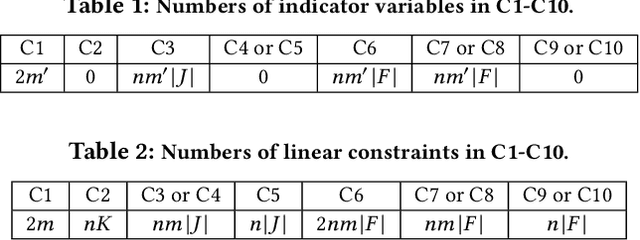
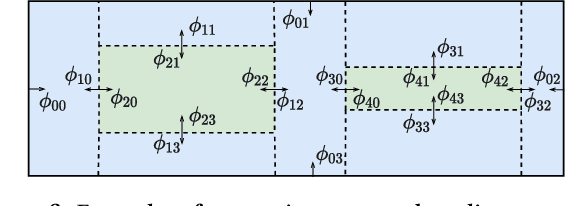
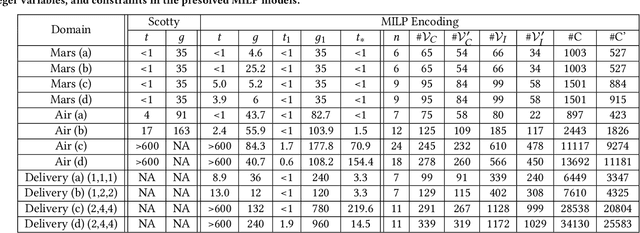
Planning in hybrid systems with both discrete and continuous control variables is important for dealing with real-world applications such as extra-planetary exploration and multi-vehicle transportation systems. Meanwhile, generating high-quality solutions given certain hybrid planning specifications is crucial to building high-performance hybrid systems. However, since hybrid planning is challenging in general, most methods use greedy search that is guided by various heuristics, which is neither complete nor optimal and often falls into blind search towards an infinite-action plan. In this paper, we present a hybrid automaton planning formalism and propose an optimal approach that encodes this planning problem as a Mixed Integer Linear Program (MILP) by fixing the action number of automaton runs. We also show an extension of our approach for reasoning over temporally concurrent goals. By leveraging an efficient MILP optimizer, our method is able to generate provably optimal solutions for complex mixed discrete-continuous planning problems within a reasonable time. We use several case studies to demonstrate the extraordinary performance of our hybrid planning method and show that it outperforms a state-of-the-art hybrid planner, Scotty, in both efficiency and solution qualities.
Learning Safe Multi-Agent Control with Decentralized Neural Barrier Certificates
Jan 31, 2021

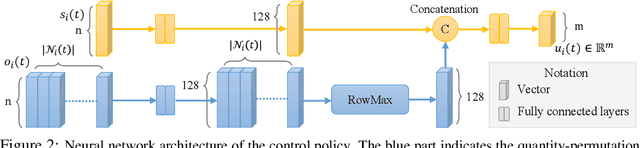
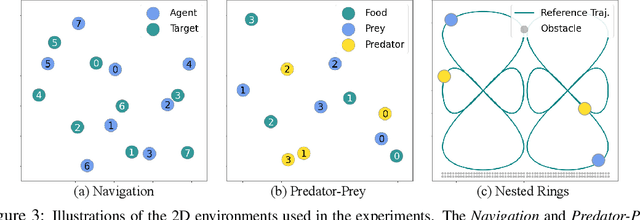
We study the multi-agent safe control problem where agents should avoid collisions to static obstacles and collisions with each other while reaching their goals. Our core idea is to learn the multi-agent control policy jointly with learning the control barrier functions as safety certificates. We propose a novel joint-learning framework that can be implemented in a decentralized fashion, with generalization guarantees for certain function classes. Such a decentralized framework can adapt to an arbitrarily large number of agents. Building upon this framework, we further improve the scalability by incorporating neural network architectures that are invariant to the quantity and permutation of neighboring agents. In addition, we propose a new spontaneous policy refinement method to further enforce the certificate condition during testing. We provide extensive experiments to demonstrate that our method significantly outperforms other leading multi-agent control approaches in terms of maintaining safety and completing original tasks. Our approach also shows exceptional generalization capability in that the control policy can be trained with 8 agents in one scenario, while being used on other scenarios with up to 1024 agents in complex multi-agent environments and dynamics.
Scalable and Safe Multi-Agent Motion Planning with Nonlinear Dynamics and Bounded Disturbances
Dec 16, 2020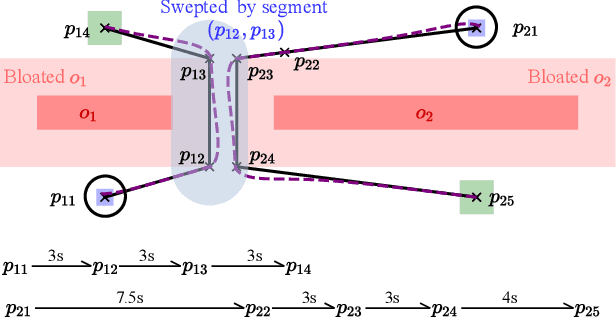
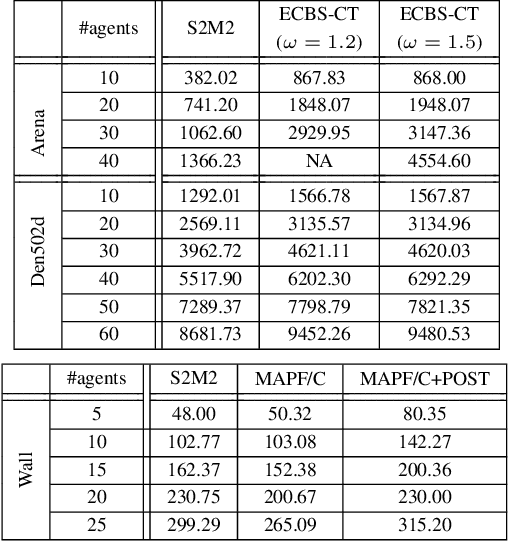
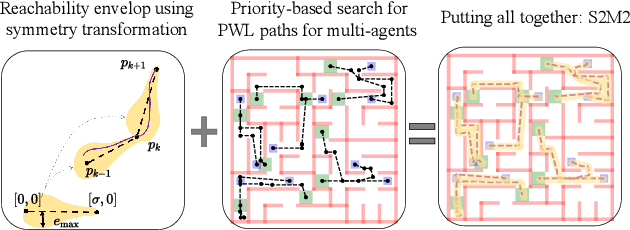
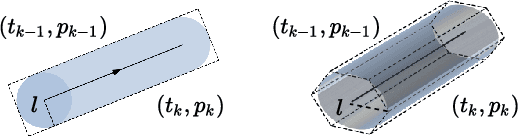
We present a scalable and effective multi-agent safe motion planner that enables a group of agents to move to their desired locations while avoiding collisions with obstacles and other agents, with the presence of rich obstacles, high-dimensional, nonlinear, nonholonomic dynamics, actuation limits, and disturbances. We address this problem by finding a piecewise linear path for each agent such that the actual trajectories following these paths are guaranteed to satisfy the reach-and-avoid requirement. We show that the spatial tracking error of the actual trajectories of the controlled agents can be pre-computed for any qualified path that considers the minimum duration of each path segment due to actuation limits. Using these bounds, we find a collision-free path for each agent by solving Mixed Integer-Linear Programs and coordinate agents by using the priority-based search. We demonstrate our method by benchmarking in 2D and 3D scenarios with ground vehicles and quadrotors, respectively, and show improvements over the solving time and the solution quality compared to two state-of-the-art multi-agent motion planners.
Efficiently Exploring Ordering Problems through Conflict-directed Search
Apr 15, 2019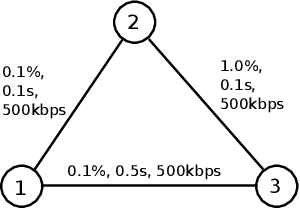
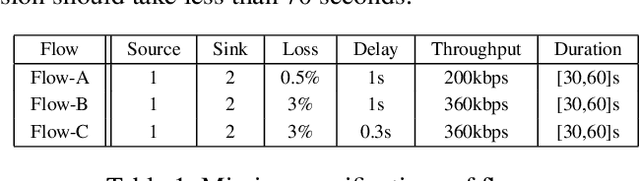
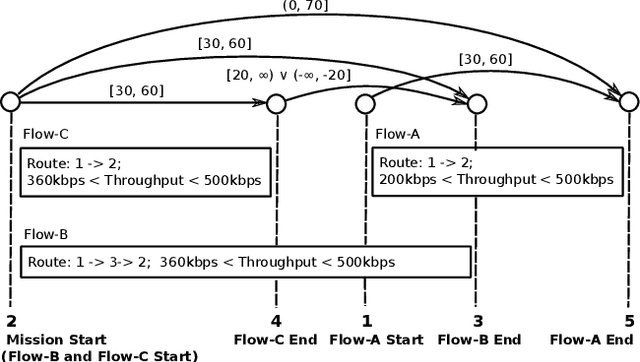
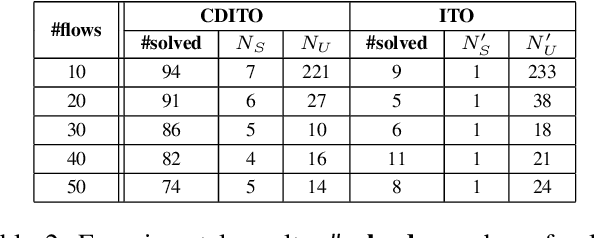
In planning and scheduling, solving problems with both state and temporal constraints is hard since these constraints may be highly coupled. Judicious orderings of events enable solvers to efficiently make decisions over sequences of actions to satisfy complex hybrid specifications. The ordering problem is thus fundamental to planning. Promising recent works have explored the ordering problem as search, incorporating a special tree structure for efficiency. However, such approaches only reason over partial order specifications. Having observed that an ordering is inconsistent with respect to underlying constraints, prior works do not exploit the tree structure to efficiently generate orderings that resolve the inconsistency. In this paper, we present Conflict-directed Incremental Total Ordering (CDITO), a conflict-directed search method to incrementally and systematically generate event total orders given ordering relations and conflicts returned by sub-solvers. Due to its ability to reason over conflicts, CDITO is much more efficient than Incremental Total Ordering. We demonstrate this by benchmarking on temporal network configuration problems that involve routing network flows and allocating bandwidth resources over time.