 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Fields meet Explicit Geometric Representation for Inverse Rendering of Urban Scenes
Apr 06, 2023



Reconstruction and intrinsic decomposition of scenes from captured imagery would enable many applications such as relighting and virtual object insertion. Recent NeRF based methods achieve impressive fidelity of 3D reconstruction, but bake the lighting and shadows into the radiance field, while mesh-based methods that facilitate intrinsic decomposition through differentiable rendering have not yet scaled to the complexity and scale of outdoor scenes. We present a novel inverse rendering framework for large urban scenes capable of jointly reconstructing the scene geometry, spatially-varying materials, and HDR lighting from a set of posed RGB images with optional depth. Specifically, we use a neural field to account for the primary rays, and use an explicit mesh (reconstructed from the underlying neural field) for modeling secondary rays that produce higher-order lighting effects such as cast shadows. By faithfully disentangling complex geometry and materials from lighting effects, our method enables photorealistic relighting with specular and shadow effects on several outdoor datasets. Moreover, it supports physics-based scene manipulations such as virtual object insertion with ray-traced shadow casting.
Trace and Pace: Controllable Pedestrian Animation via Guided Trajectory Diffusion
Apr 04, 2023



We introduce a method for generating realistic pedestrian trajectories and full-body animations that can be controlled to meet user-defined goals. We draw on recent advances in guided diffusion modeling to achieve test-time controllability of trajectories, which is normally only associated with rule-based systems. Our guided diffusion model allows users to constrain trajectories through target waypoints, speed, and specified social groups while accounting for the surrounding environment context. This trajectory diffusion model is integrated with a novel physics-based humanoid controller to form a closed-loop, full-body pedestrian animation system capable of placing large crowds in a simulated environment with varying terrains. We further propose utilizing the value function learned during RL training of the animation controller to guide diffusion to produce trajectories better suited for particular scenarios such as collision avoidance and traversing uneven terrain. Video results are available on the project page at https://nv-tlabs.github.io/trace-pace .
VoxFormer: Sparse Voxel Transformer for Camera-based 3D Semantic Scene Completion
Feb 23, 2023



Humans can easily imagine the complete 3D geometry of occluded objects and scenes. This appealing ability is vital for recognition and understanding. To enable such capability in AI systems, we propose VoxFormer, a Transformer-based semantic scene completion framework that can output complete 3D volumetric semantics from only 2D images. Our framework adopts a two-stage design where we start from a sparse set of visible and occupied voxel queries from depth estimation, followed by a densification stage that generates dense 3D voxels from the sparse ones. A key idea of this design is that the visual features on 2D images correspond only to the visible scene structures rather than the occluded or empty spaces. Therefore, starting with the featurization and prediction of the visible structures is more reliable. Once we obtain the set of sparse queries, we apply a masked autoencoder design to propagate the information to all the voxels by self-attention. Experiments on SemanticKITTI show that VoxFormer outperforms the state of the art with a relative improvement of 20.0% in geometry and 18.1% in semantics and reduces GPU memory during training by ~45% to less than 16GB. Our code is available on https://github.com/NVlabs/VoxFormer.
Bridging the Sim2Real gap with CARE: Supervised Detection Adaptation with Conditional Alignment and Reweighting
Feb 09, 2023



Sim2Real domain adaptation (DA) research focuses on the constrained setting of adapting from a labeled synthetic source domain to an unlabeled or sparsely labeled real target domain. However, for high-stakes applications (e.g. autonomous driving), it is common to have a modest amount of human-labeled real data in addition to plentiful auto-labeled source data (e.g. from a driving simulator). We study this setting of supervised sim2real DA applied to 2D object detection. We propose Domain Translation via Conditional Alignment and Reweighting (CARE) a novel algorithm that systematically exploits target labels to explicitly close the sim2real appearance and content gaps. We present an analytical justification of our algorithm and demonstrate strong gains over competing methods on standard benchmarks.
Synthesizing Physical Character-Scene Interactions
Feb 02, 2023Movement is how people interact with and affect their environment. For realistic character animation, it is necessary to synthesize such interactions between virtual characters and their surroundings. Despite recent progress in character animation using machine learning, most systems focus on controlling an agent's movements in fairly simple and homogeneous environments, with limited interactions with other objects. Furthermore, many previous approaches that synthesize human-scene interactions require significant manual labeling of the training data. In contrast, we present a system that uses adversarial imitation learning and reinforcement learning to train physically-simulated characters that perform scene interaction tasks in a natural and life-like manner. Our method learns scene interaction behaviors from large unstructured motion datasets, without manual annotation of the motion data. These scene interactions are learned using an adversarial discriminator that evaluates the realism of a motion within the context of a scene. The key novelty involves conditioning both the discriminator and the policy networks on scene context. We demonstrate the effectiveness of our approach through three challenging scene interaction tasks: carrying, sitting, and lying down, which require coordination of a character's movements in relation to objects in the environment. Our policies learn to seamlessly transition between different behaviors like idling, walking, and sitting. By randomizing the properties of the objects and their placements during training, our method is able to generalize beyond the objects and scenarios depicted in the training dataset, producing natural character-scene interactions for a wide variety of object shapes and placements. The approach takes physics-based character motion generation a step closer to broad applicability.
PADL: Language-Directed Physics-Based Character Control
Jan 31, 2023



Developing systems that can synthesize natural and life-like motions for simulated characters has long been a focus for computer animation. But in order for these systems to be useful for downstream applications, they need not only produce high-quality motions, but must also provide an accessible and versatile interface through which users can direct a character's behaviors. Natural language provides a simple-to-use and expressive medium for specifying a user's intent. Recent breakthroughs in natural language processing (NLP) have demonstrated effective use of language-based interfaces for applications such as image generation and program synthesis. In this work, we present PADL, which leverages recent innovations in NLP in order to take steps towards developing language-directed controllers for physics-based character animation. PADL allows users to issue natural language commands for specifying both high-level tasks and low-level skills that a character should perform. We present an adversarial imitation learning approach for training policies to map high-level language commands to low-level controls that enable a character to perform the desired task and skill specified by a user's commands. Furthermore, we propose a multi-task aggregation method that leverages a language-based multiple-choice question-answering approach to determine high-level task objectives from language commands. We show that our framework can be applied to effectively direct a simulated humanoid character to perform a diverse array of complex motor skills.
Magic3D: High-Resolution Text-to-3D Content Creation
Nov 18, 2022



DreamFusion has recently demonstrated the utility of a pre-trained text-to-image diffusion model to optimize Neural Radiance Fields (NeRF), achieving remarkable text-to-3D synthesis results. However, the method has two inherent limitations: (a) extremely slow optimization of NeRF and (b) low-resolution image space supervision on NeRF, leading to low-quality 3D models with a long processing time. In this paper, we address these limitations by utilizing a two-stage optimization framework. First, we obtain a coarse model using a low-resolution diffusion prior and accelerate with a sparse 3D hash grid structure. Using the coarse representation as the initialization, we further optimize a textured 3D mesh model with an efficient differentiable renderer interacting with a high-resolution latent diffusion model. Our method, dubbed Magic3D, can create high quality 3D mesh models in 40 minutes, which is 2x faster than DreamFusion (reportedly taking 1.5 hours on average), while also achieving higher resolution. User studies show 61.7% raters to prefer our approach over DreamFusion. Together with the image-conditioned generation capabilities, we provide users with new ways to control 3D synthesis, opening up new avenues to various creative applications.
LION: Latent Point Diffusion Models for 3D Shape Generation
Oct 12, 2022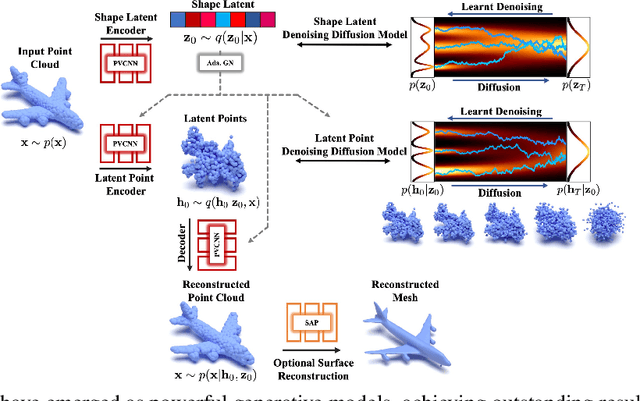
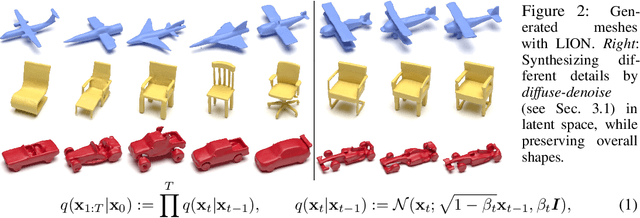
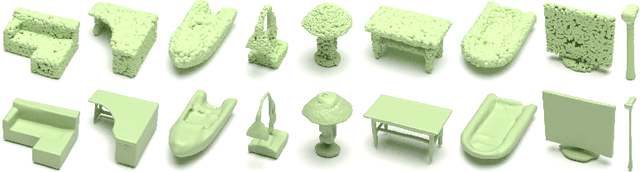
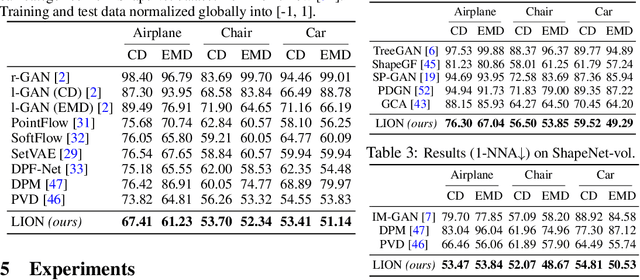
Denoising diffusion models (DDMs) have shown promising results in 3D point cloud synthesis. To advance 3D DDMs and make them useful for digital artists, we require (i) high generation quality, (ii) flexibility for manipulation and applications such as conditional synthesis and shape interpolation, and (iii) the ability to output smooth surfaces or meshes. To this end, we introduce the hierarchical Latent Point Diffusion Model (LION) for 3D shape generation. LION is set up as a variational autoencoder (VAE) with a hierarchical latent space that combines a global shape latent representation with a point-structured latent space. For generation, we train two hierarchical DDMs in these latent spaces. The hierarchical VAE approach boosts performance compared to DDMs that operate on point clouds directly, while the point-structured latents are still ideally suited for DDM-based modeling. Experimentally, LION achieves state-of-the-art generation performance on multiple ShapeNet benchmarks. Furthermore, our VAE framework allows us to easily use LION for different relevant tasks: LION excels at multimodal shape denoising and voxel-conditioned synthesis, and it can be adapted for text- and image-driven 3D generation. We also demonstrate shape autoencoding and latent shape interpolation, and we augment LION with modern surface reconstruction techniques to generate smooth 3D meshes. We hope that LION provides a powerful tool for artists working with 3D shapes due to its high-quality generation, flexibility, and surface reconstruction. Project page and code: https://nv-tlabs.github.io/LION.
XDGAN: Multi-Modal 3D Shape Generation in 2D Space
Oct 06, 2022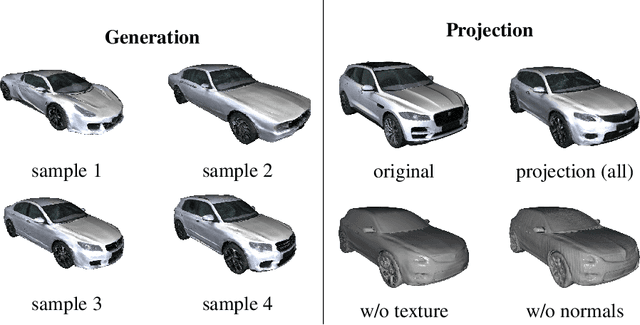
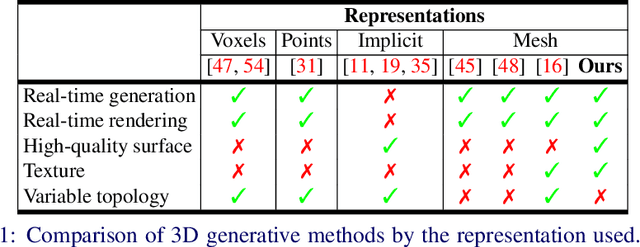
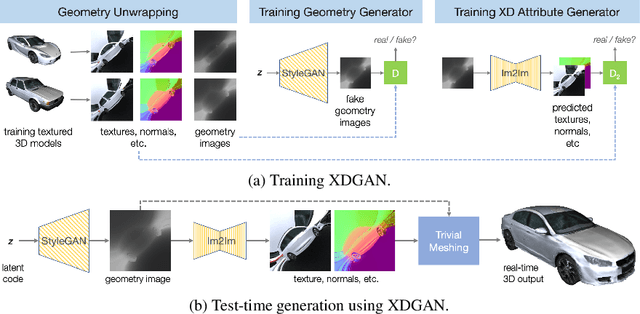
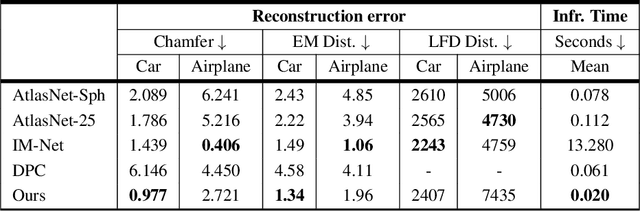
Generative models for 2D images has recently seen tremendous progress in quality, resolution and speed as a result of the efficiency of 2D convolutional architectures. However it is difficult to extend this progress into the 3D domain since most current 3D representations rely on custom network components. This paper addresses a central question: Is it possible to directly leverage 2D image generative models to generate 3D shapes instead? To answer this, we propose XDGAN, an effective and fast method for applying 2D image GAN architectures to the generation of 3D object geometry combined with additional surface attributes, like color textures and normals. Specifically, we propose a novel method to convert 3D shapes into compact 1-channel geometry images and leverage StyleGAN3 and image-to-image translation networks to generate 3D objects in 2D space. The generated geometry images are quick to convert to 3D meshes, enabling real-time 3D object synthesis, visualization and interactive editing. Moreover, the use of standard 2D architectures can help bring more 2D advances into the 3D realm. We show both quantitatively and qualitatively that our method is highly effective at various tasks such as 3D shape generation, single view reconstruction and shape manipulation, while being significantly faster and more flexible compared to recent 3D generative models.
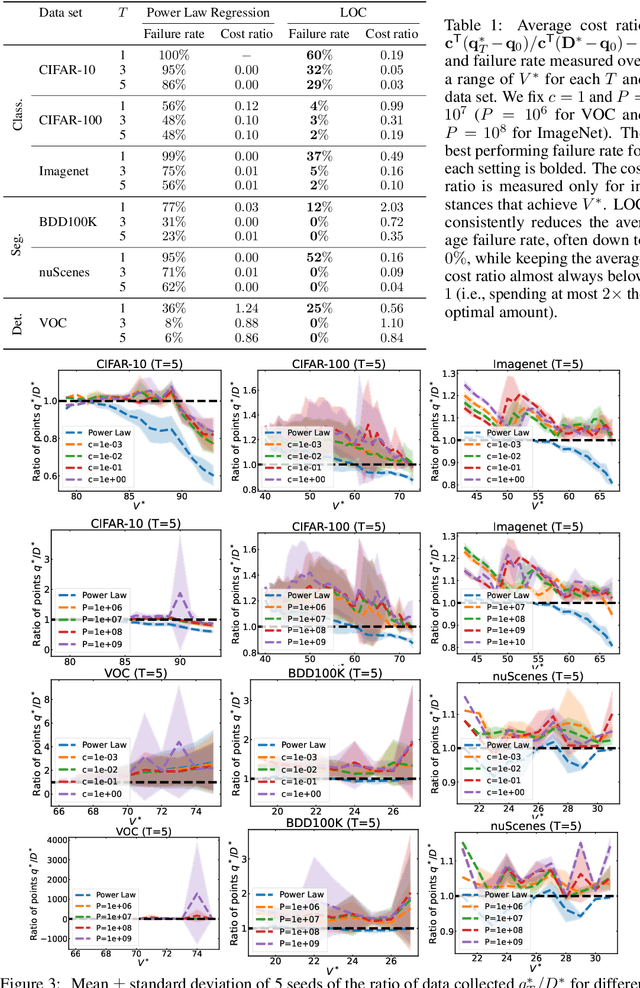
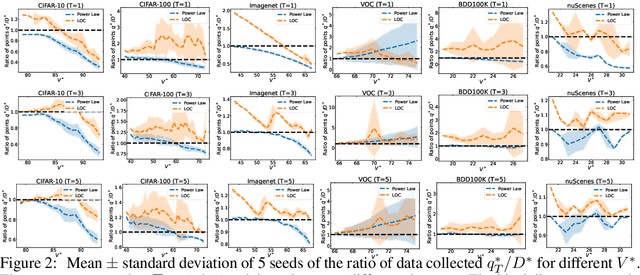
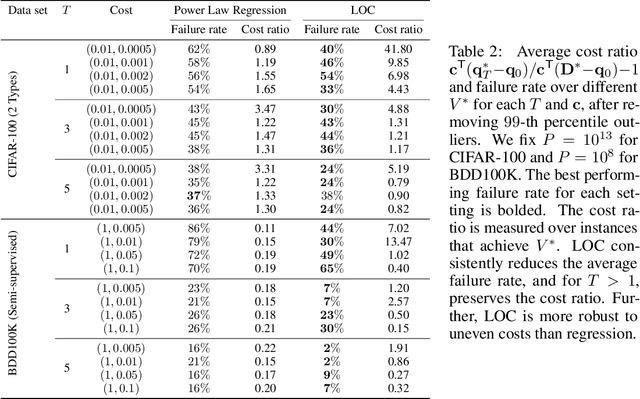
Optimizing Data Collection for Machine Learning
Oct 03, 2022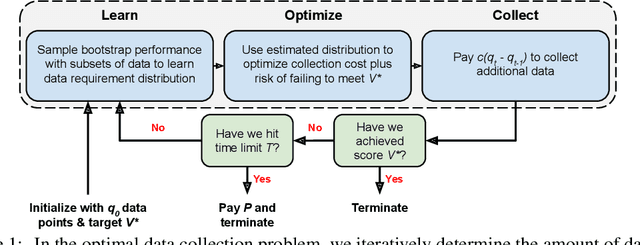
Modern deep learning systems require huge data sets to achieve impressive performance, but there is little guidance on how much or what kind of data to collect. Over-collecting data incurs unnecessary present costs, while under-collecting may incur future costs and delay workflows. We propose a new paradigm for modeling the data collection workflow as a formal optimal data collection problem that allows designers to specify performance targets, collection costs, a time horizon, and penalties for failing to meet the targets. Additionally, this formulation generalizes to tasks requiring multiple data sources, such as labeled and unlabeled data used in semi-supervised learning. To solve our problem, we develop Learn-Optimize-Collect (LOC), which minimizes expected future collection costs. Finally, we numerically compare our framework to the conventional baseline of estimating data requirements by extrapolating from neural scaling laws. We significantly reduce the risks of failing to meet desired performance targets on several classification, segmentation, and detection tasks, while maintaining low total collection costs.