 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Simple Approach to Continual Learning by Transferring Skill Parameters
Oct 19, 2021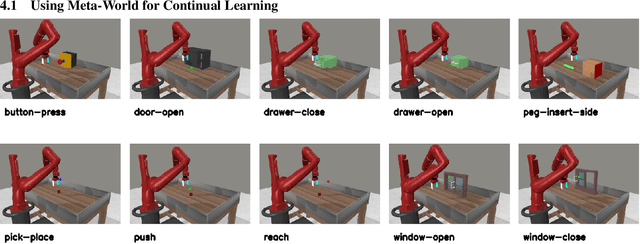
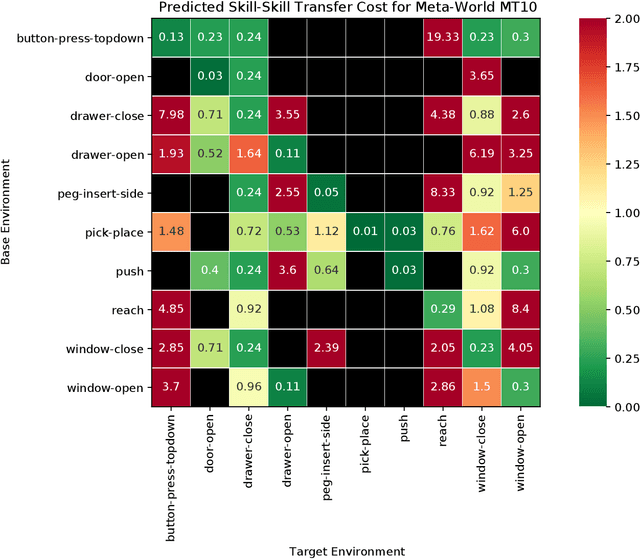
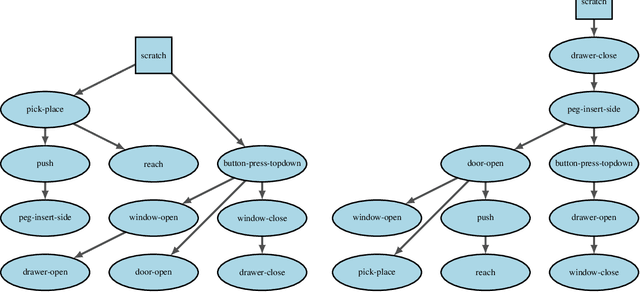
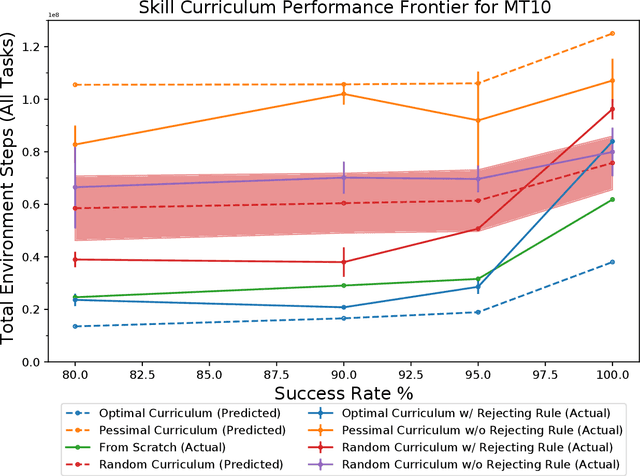
In order to be effective general purpose machines in real world environments, robots not only will need to adapt their existing manipulation skills to new circumstances, they will need to acquire entirely new skills on-the-fly. A great promise of continual learning is to endow robots with this ability, by using their accumulated knowledge and experience from prior skills. We take a fresh look at this problem, by considering a setting in which the robot is limited to storing that knowledge and experience only in the form of learned skill policies. We show that storing skill policies, careful pre-training, and appropriately choosing when to transfer those skill policies is sufficient to build a continual learner in the context of robotic manipulation. We analyze which conditions are needed to transfer skills in the challenging Meta-World simulation benchmark. Using this analysis, we introduce a pair-wise metric relating skills that allows us to predict the effectiveness of skill transfer between tasks, and use it to reduce the problem of continual learning to curriculum selection. Given an appropriate curriculum, we show how to continually acquire robotic manipulation skills without forgetting, and using far fewer samples than needed to train them from scratch.
Towards Exploiting Geometry and Time for Fast Off-Distribution Adaptation in Multi-Task Robot Learning
Jun 29, 2021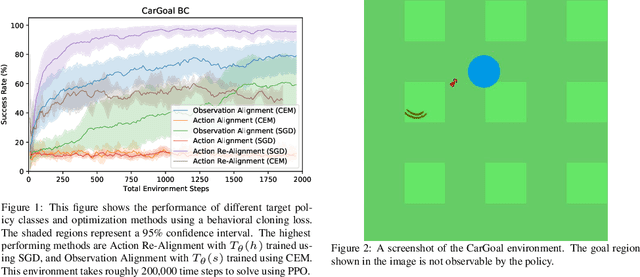
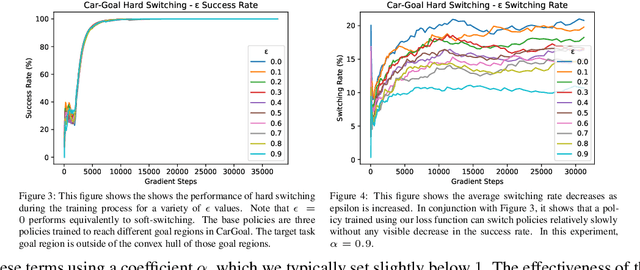
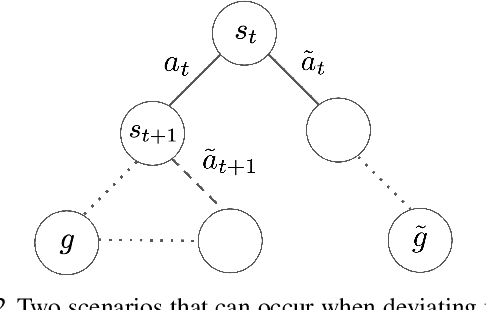
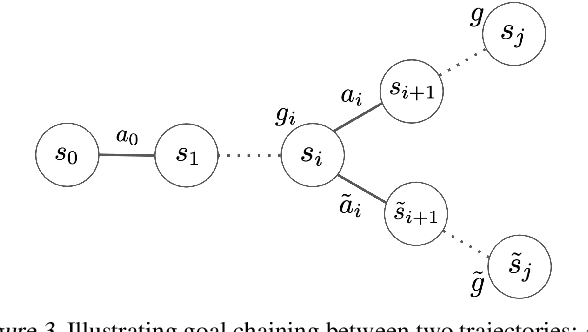
We explore possible methods for multi-task transfer learning which seek to exploit the shared physical structure of robotics tasks. Specifically, we train policies for a base set of pre-training tasks, then experiment with adapting to new off-distribution tasks, using simple architectural approaches for re-using these policies as black-box priors. These approaches include learning an alignment of either the observation space or action space from a base to a target task to exploit rigid body structure, and methods for learning a time-domain switching policy across base tasks which solves the target task, to exploit temporal coherence. We find that combining low-complexity target policy classes, base policies as black-box priors, and simple optimization algorithms allows us to acquire new tasks outside the base task distribution, using small amounts of offline training data.
Actionable Models: Unsupervised Offline Reinforcement Learning of Robotic Skills
Apr 28, 2021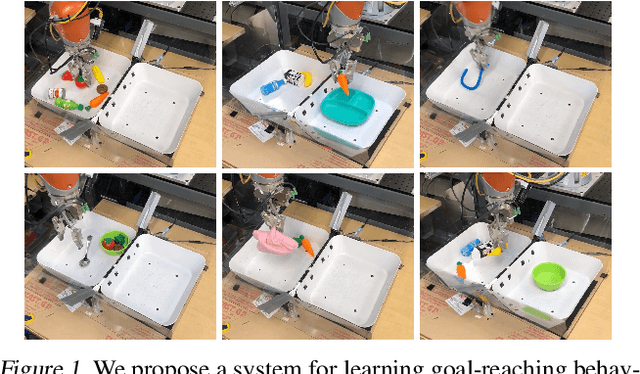
We consider the problem of learning useful robotic skills from previously collected offline data without access to manually specified rewards or additional online exploration, a setting that is becoming increasingly important for scaling robot learning by reusing past robotic data. In particular, we propose the objective of learning a functional understanding of the environment by learning to reach any goal state in a given dataset. We employ goal-conditioned Q-learning with hindsight relabeling and develop several techniques that enable training in a particularly challenging offline setting. We find that our method can operate on high-dimensional camera images and learn a variety of skills on real robots that generalize to previously unseen scenes and objects. We also show that our method can learn to reach long-horizon goals across multiple episodes, and learn rich representations that can help with downstream tasks through pre-training or auxiliary objectives. The videos of our experiments can be found at https://actionable-models.github.io
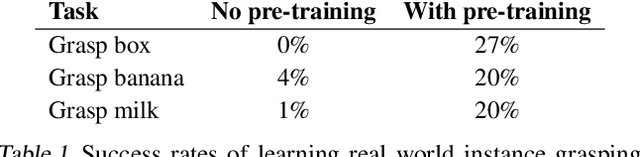
Efficient Adaptation for End-to-End Vision-Based Robotic Manipulation
Apr 21, 2020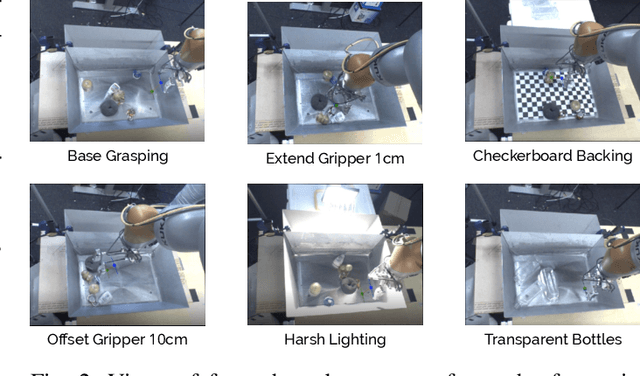
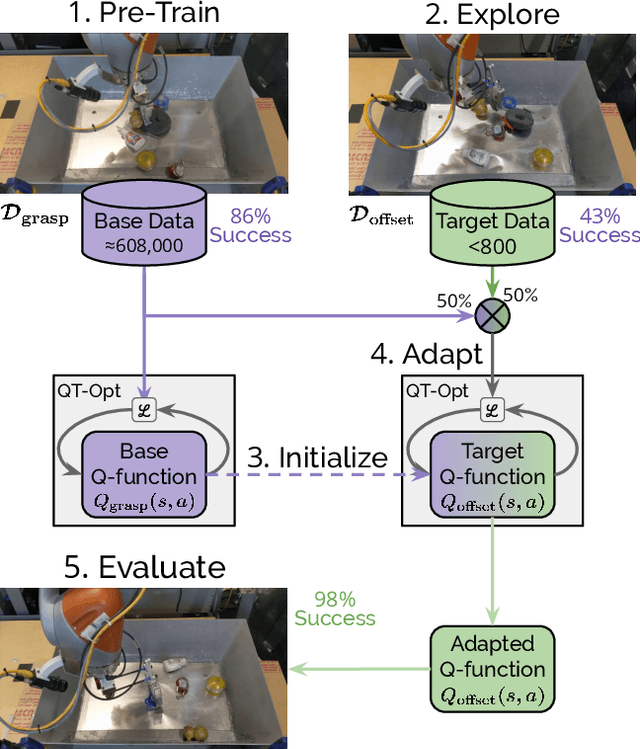
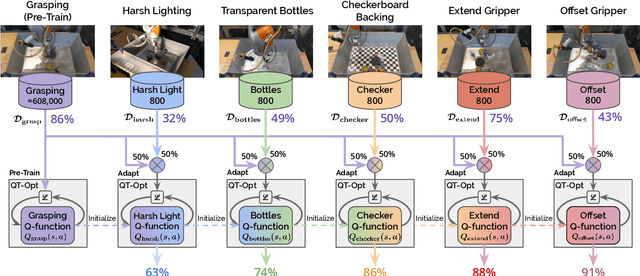
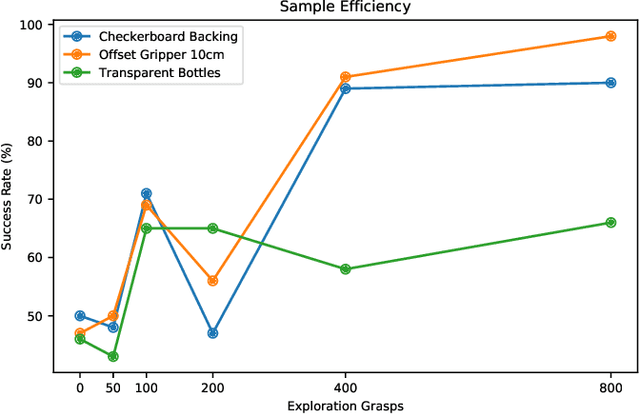
One of the great promises of robot learning systems is that they will be able to learn from their mistakes and continuously adapt to ever-changing environments. Despite this potential, most of the robot learning systems today are deployed as a fixed policy and they are not being adapted after their deployment. Can we efficiently adapt previously learned behaviors to new environments, objects and percepts in the real world? In this paper, we present a method and empirical evidence towards a robot learning framework that facilitates continuous adaption. In particular, we demonstrate how to adapt vision-based robotic manipulation policies to new variations by fine-tuning via off-policy reinforcement learning, including changes in background, object shape and appearance, lighting conditions, and robot morphology. Further, this adaptation uses less than 0.2% of the data necessary to learn the task from scratch. We find that our approach of adapting pre-trained policies leads to substantial performance gains over the course of fine-tuning, and that pre-training via RL is essential: training from scratch or adapting from supervised ImageNet features are both unsuccessful with such small amounts of data. We also find that these positive results hold in a limited continual learning setting, in which we repeatedly fine-tune a single lineage of policies using data from a succession of new tasks. Our empirical conclusions are consistently supported by experiments on simulated manipulation tasks, and by 52 unique fine-tuning experiments on a real robotic grasping system pre-trained on 580,000 grasps.
Meta-World: A Benchmark and Evaluation for Multi-Task and Meta Reinforcement Learning
Oct 24, 2019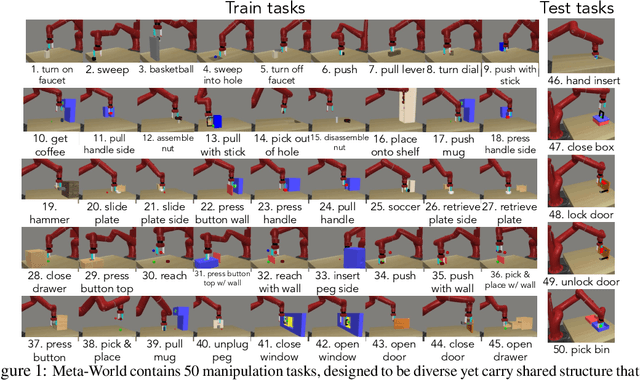

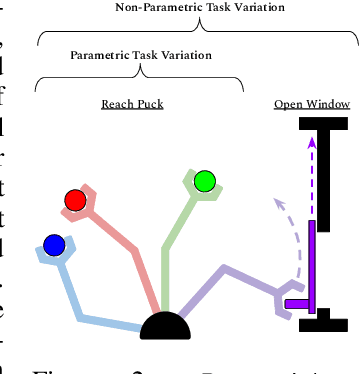
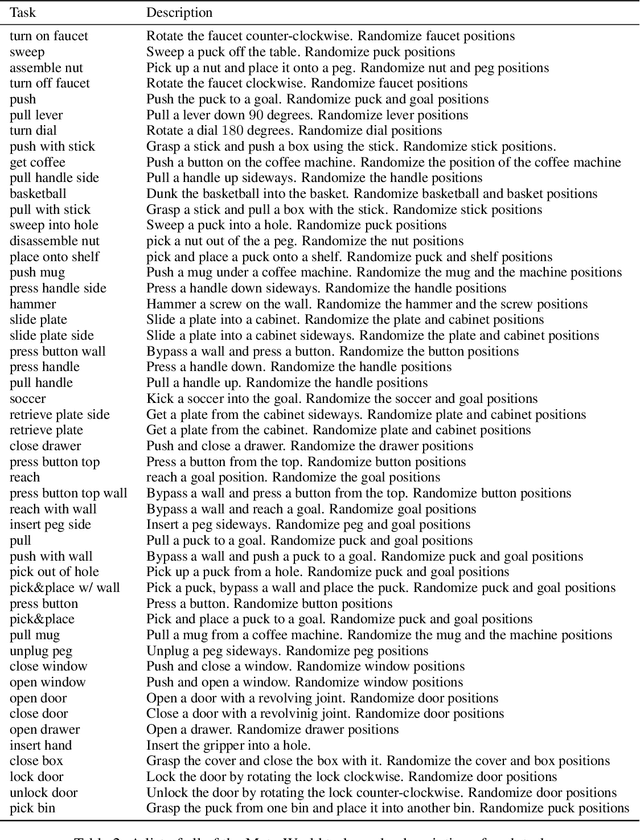
Meta-reinforcement learning algorithms can enable robots to acquire new skills much more quickly, by leveraging prior experience to learn how to learn. However, much of the current research on meta-reinforcement learning focuses on task distributions that are very narrow. For example, a commonly used meta-reinforcement learning benchmark uses different running velocities for a simulated robot as different tasks. When policies are meta-trained on such narrow task distributions, they cannot possibly generalize to more quickly acquire entirely new tasks. Therefore, if the aim of these methods is to enable faster acquisition of entirely new behaviors, we must evaluate them on task distributions that are sufficiently broad to enable generalization to new behaviors. In this paper, we propose an open-source simulated benchmark for meta-reinforcement learning and multi-task learning consisting of 50 distinct robotic manipulation tasks. Our aim is to make it possible to develop algorithms that generalize to accelerate the acquisition of entirely new, held-out tasks. We evaluate 6 state-of-the-art meta-reinforcement learning and multi-task learning algorithms on these tasks. Surprisingly, while each task and its variations (e.g., with different object positions) can be learned with reasonable success, these algorithms struggle to learn with multiple tasks at the same time, even with as few as ten distinct training tasks. Our analysis and open-source environments pave the way for future research in multi-task learning and meta-learning that can enable meaningful generalization, thereby unlocking the full potential of these methods.
Scaling simulation-to-real transfer by learning composable robot skills
Nov 13, 2018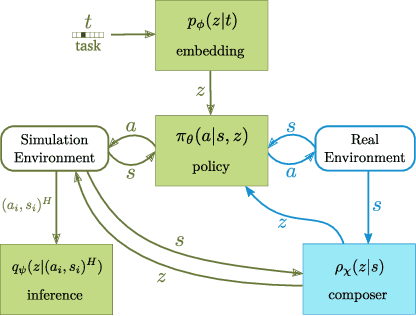
We present a novel solution to the problem of simulation-to-real transfer, which builds on recent advances in robot skill decomposition. Rather than focusing on minimizing the simulation-reality gap, we learn a set of diverse policies that are parameterized in a way that makes them easily reusable. This diversity and parameterization of low-level skills allows us to find a transferable policy that is able to use combinations and variations of different skills to solve more complex, high-level tasks. In particular, we first use simulation to jointly learn a policy for a set of low-level skills, and a "skill embedding" parameterization which can be used to compose them. Later, we learn high-level policies which actuate the low-level policies via this skill embedding parameterization. The high-level policies encode how and when to reuse the low-level skills together to achieve specific high-level tasks. Importantly, our method learns to control a real robot in joint-space to achieve these high-level tasks with little or no on-robot time, despite the fact that the low-level policies may not be perfectly transferable from simulation to real, and that the low-level skills were not trained on any examples of high-level tasks. We illustrate the principles of our method using informative simulation experiments. We then verify its usefulness for real robotics problems by learning, transferring, and composing free-space and contact motion skills on a Sawyer robot using only joint-space control. We experiment with several techniques for composing pre-learned skills, and find that our method allows us to use both learning-based approaches and efficient search-based planning to achieve high-level tasks using only pre-learned skills.
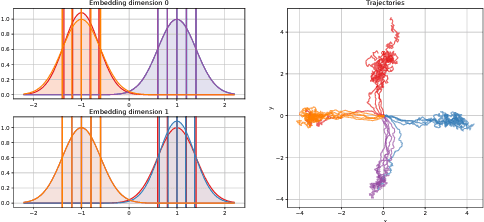
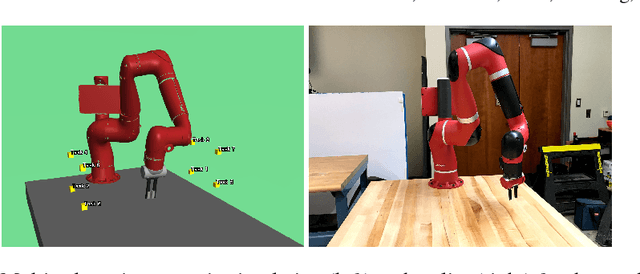
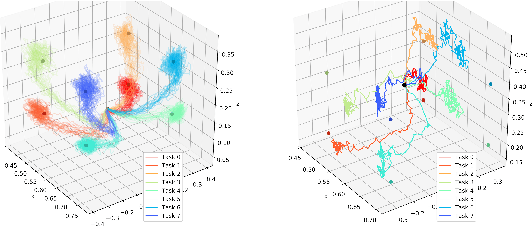
Zero-Shot Skill Composition and Simulation-to-Real Transfer by Learning Task Representations
Nov 13, 2018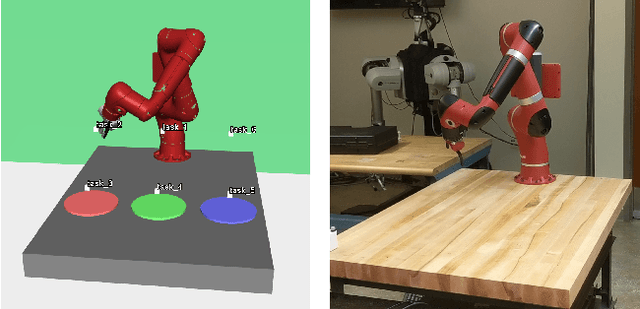
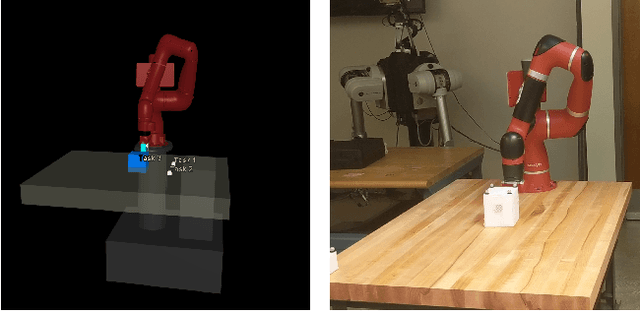
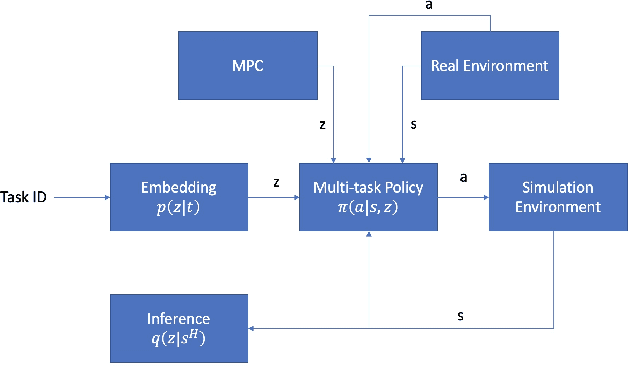
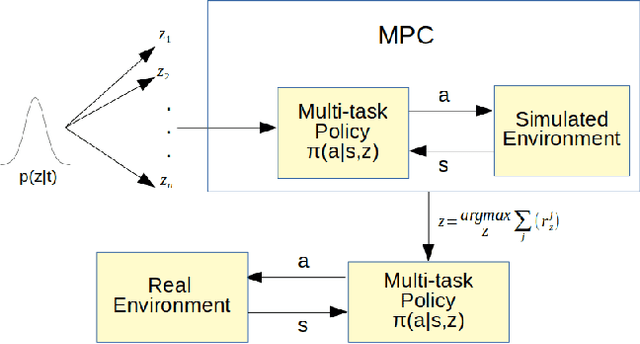
Simulation-to-real transfer is an important strategy for making reinforcement learning practical with real robots. Successful sim-to-real transfer systems have difficulty producing policies which generalize across tasks, despite training for thousands of hours equivalent real robot time. To address this shortcoming, we present a novel approach to efficiently learning new robotic skills directly on a real robot, based on model-predictive control (MPC) and an algorithm for learning task representations. In short, we show how to reuse the simulation from the pre-training step of sim-to-real methods as a tool for foresight, allowing the sim-to-real policy adapt to unseen tasks. Rather than end-to-end learning policies for single tasks and attempting to transfer them, we first use simulation to simultaneously learn (1) a continuous parameterization (i.e. a skill embedding or latent) of task-appropriate primitive skills, and (2) a single policy for these skills which is conditioned on this representation. We then directly transfer our multi-skill policy to a real robot, and actuate the robot by choosing sequences of skill latents which actuate the policy, with each latent corresponding to a pre-learned primitive skill controller. We complete unseen tasks by choosing new sequences of skill latents to control the robot using MPC, where our MPC model is composed of the pre-trained skill policy executed in the simulation environment, run in parallel with the real robot. We discuss the background and principles of our method, detail its practical implementation, and evaluate its performance by using our method to train a real Sawyer Robot to achieve motion tasks such as drawing and block pushing.