 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Evaluation of Vision-and-Language Navigation Instructions
Jan 26, 2021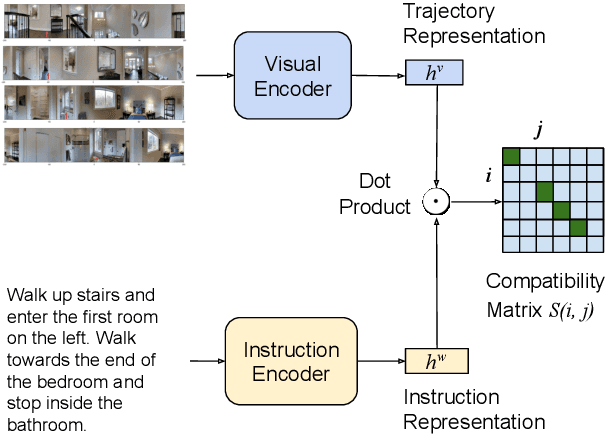
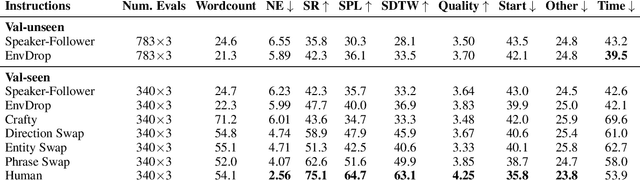
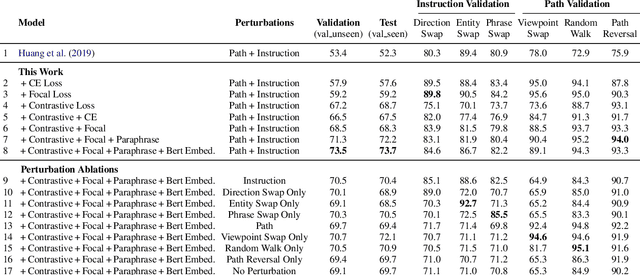
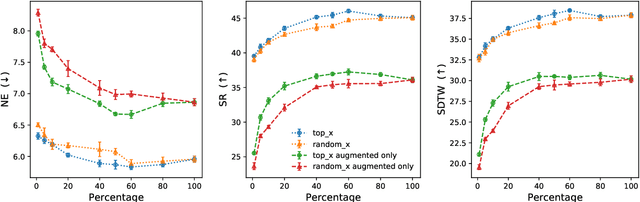
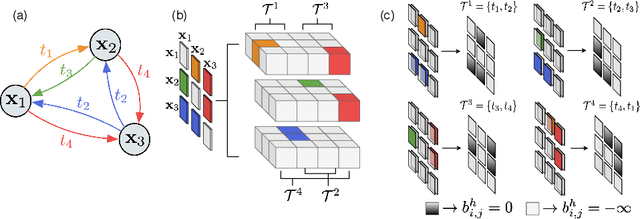
Vision-and-Language Navigation wayfinding agents can be enhanced by exploiting automatically generated navigation instructions. However, existing instruction generators have not been comprehensively evaluated, and the automatic evaluation metrics used to develop them have not been validated. Using human wayfinders, we show that these generators perform on par with or only slightly better than a template-based generator and far worse than human instructors. Furthermore, we discover that BLEU, ROUGE, METEOR and CIDEr are ineffective for evaluating grounded navigation instructions. To improve instruction evaluation, we propose an instruction-trajectory compatibility model that operates without reference instructions. Our model shows the highest correlation with human wayfinding outcomes when scoring individual instructions. For ranking instruction generation systems, if reference instructions are available we recommend using SPICE.
Where Are You? Localization from Embodied Dialog
Nov 16, 2020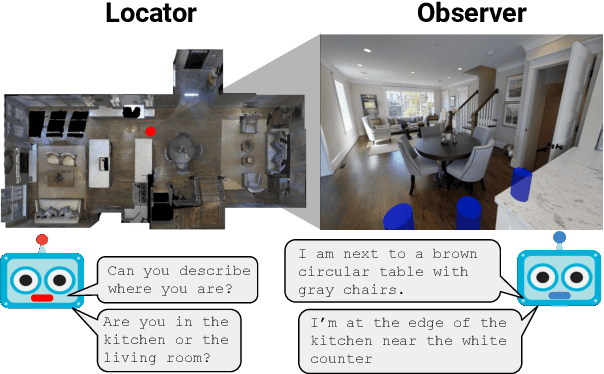
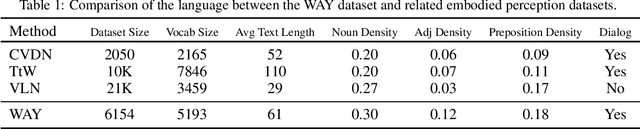
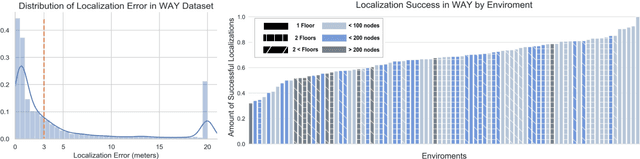
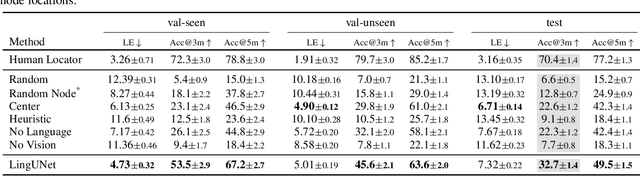
We present Where Are You? (WAY), a dataset of ~6k dialogs in which two humans -- an Observer and a Locator -- complete a cooperative localization task. The Observer is spawned at random in a 3D environment and can navigate from first-person views while answering questions from the Locator. The Locator must localize the Observer in a detailed top-down map by asking questions and giving instructions. Based on this dataset, we define three challenging tasks: Localization from Embodied Dialog or LED (localizing the Observer from dialog history), Embodied Visual Dialog (modeling the Observer), and Cooperative Localization (modeling both agents). In this paper, we focus on the LED task -- providing a strong baseline model with detailed ablations characterizing both dataset biases and the importance of various modeling choices. Our best model achieves 32.7% success at identifying the Observer's location within 3m in unseen buildings, vs. 70.4% for human Locators.
Sim-to-Real Transfer for Vision-and-Language Navigation
Nov 07, 2020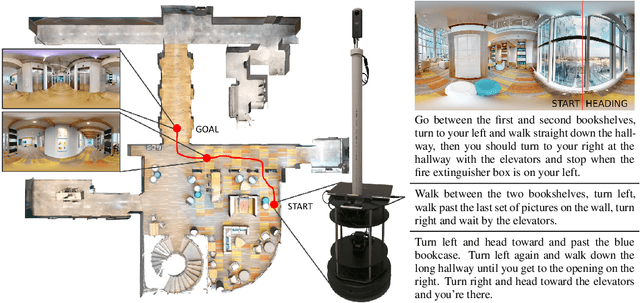

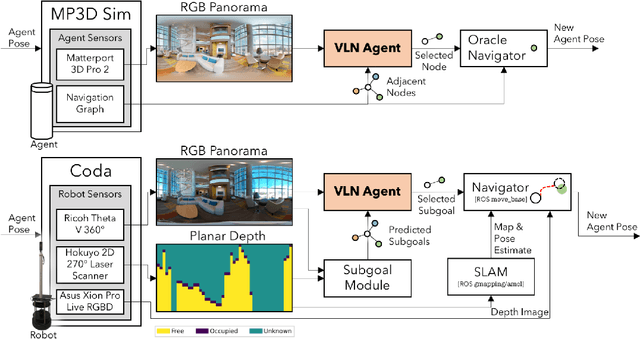

We study the challenging problem of releasing a robot in a previously unseen environment, and having it follow unconstrained natural language navigation instructions. Recent work on the task of Vision-and-Language Navigation (VLN) has achieved significant progress in simulation. To assess the implications of this work for robotics, we transfer a VLN agent trained in simulation to a physical robot. To bridge the gap between the high-level discrete action space learned by the VLN agent, and the robot's low-level continuous action space, we propose a subgoal model to identify nearby waypoints, and use domain randomization to mitigate visual domain differences. For accurate sim and real comparisons in parallel environments, we annotate a 325m2 office space with 1.3km of navigation instructions, and create a digitized replica in simulation. We find that sim-to-real transfer to an environment not seen in training is successful if an occupancy map and navigation graph can be collected and annotated in advance (success rate of 46.8% vs. 55.9% in sim), but much more challenging in the hardest setting with no prior mapping at all (success rate of 22.5%).
Room-Across-Room: Multilingual Vision-and-Language Navigation with Dense Spatiotemporal Grounding
Oct 15, 2020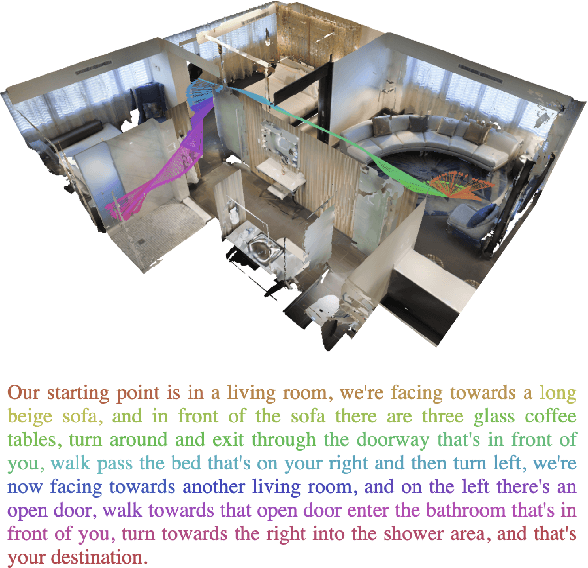
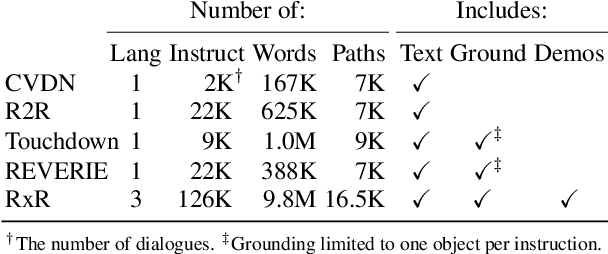
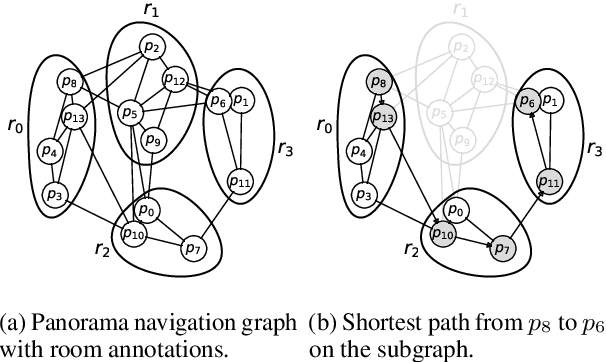
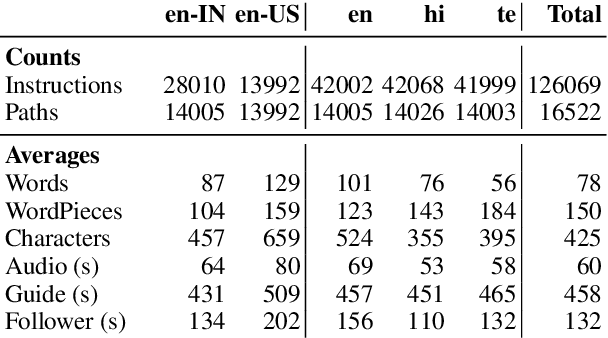
We introduce Room-Across-Room (RxR), a new Vision-and-Language Navigation (VLN) dataset. RxR is multilingual (English, Hindi, and Telugu) and larger (more paths and instructions) than other VLN datasets. It emphasizes the role of language in VLN by addressing known biases in paths and eliciting more references to visible entities. Furthermore, each word in an instruction is time-aligned to the virtual poses of instruction creators and validators. We establish baseline scores for monolingual and multilingual settings and multitask learning when including Room-to-Room annotations. We also provide results for a model that learns from synchronized pose traces by focusing only on portions of the panorama attended to in human demonstrations. The size, scope and detail of RxR dramatically expands the frontier for research on embodied language agents in simulated, photo-realistic environments.
Spatially Aware Multimodal Transformers for TextVQA
Jul 23, 2020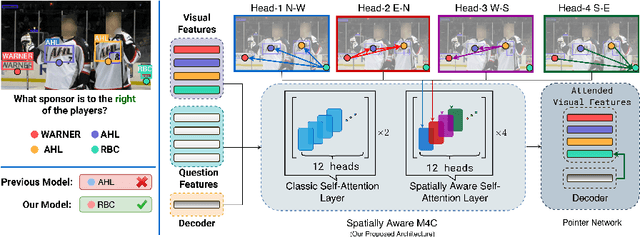

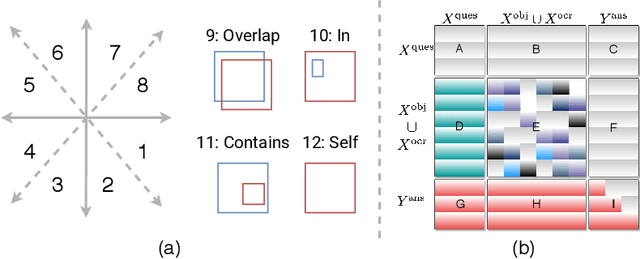
Textual cues are essential for everyday tasks like buying groceries and using public transport. To develop this assistive technology, we study the TextVQA task, i.e., reasoning about text in images to answer a question. Existing approaches are limited in their use of spatial relations and rely on fully-connected transformer-like architectures to implicitly learn the spatial structure of a scene. In contrast, we propose a novel spatially aware self-attention layer such that each visual entity only looks at neighboring entities defined by a spatial graph. Further, each head in our multi-head self-attention layer focuses on a different subset of relations. Our approach has two advantages: (1) each head considers local context instead of dispersing the attention amongst all visual entities; (2) we avoid learning redundant features. We show that our model improves the absolute accuracy of current state-of-the-art methods on TextVQA by 2.2% overall over an improved baseline, and 4.62% on questions that involve spatial reasoning and can be answered correctly using OCR tokens. Similarly on ST-VQA, we improve the absolute accuracy by 4.2%. We further show that spatially aware self-attention improves visual grounding.
Improving Vision-and-Language Navigation with Image-Text Pairs from the Web
May 01, 2020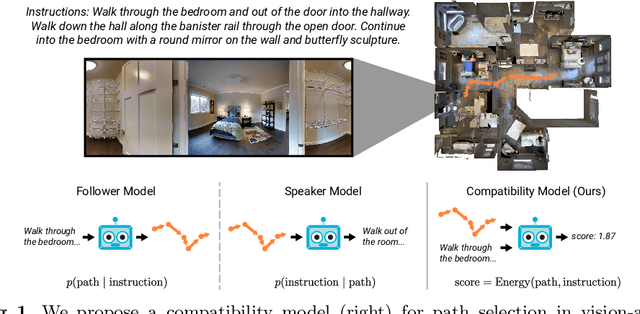
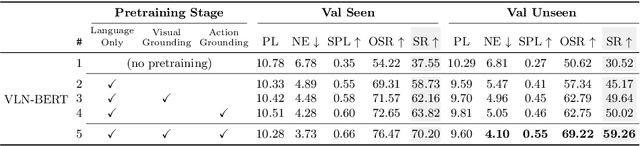
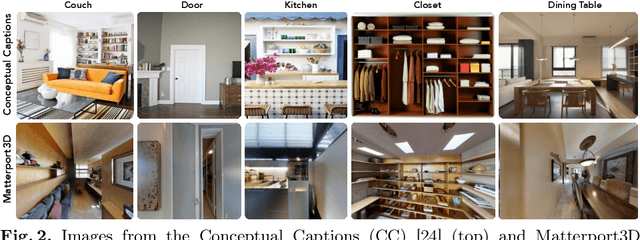
Following a navigation instruction such as 'Walk down the stairs and stop at the brown sofa' requires embodied AI agents to ground scene elements referenced via language (e.g. 'stairs') to visual content in the environment (pixels corresponding to 'stairs'). We ask the following question -- can we leverage abundant 'disembodied' web-scraped vision-and-language corpora (e.g. Conceptual Captions) to learn visual groundings (what do 'stairs' look like?) that improve performance on a relatively data-starved embodied perception task (Vision-and-Language Navigation)? Specifically, we develop VLN-BERT, a visiolinguistic transformer-based model for scoring the compatibility between an instruction ('...stop at the brown sofa') and a sequence of panoramic RGB images captured by the agent. We demonstrate that pretraining VLN-BERT on image-text pairs from the web before fine-tuning on embodied path-instruction data significantly improves performance on VLN -- outperforming the prior state-of-the-art in the fully-observed setting by 4 absolute percentage points on success rate. Ablations of our pretraining curriculum show each stage to be impactful -- with their combination resulting in further positive synergistic effects.
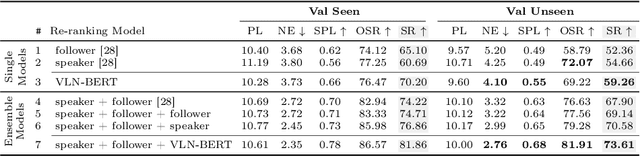
Chasing Ghosts: Instruction Following as Bayesian State Tracking
Jul 03, 2019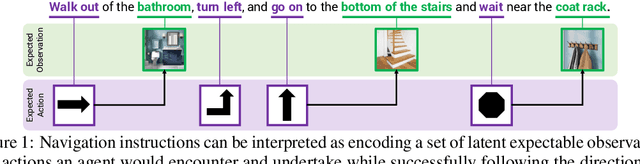
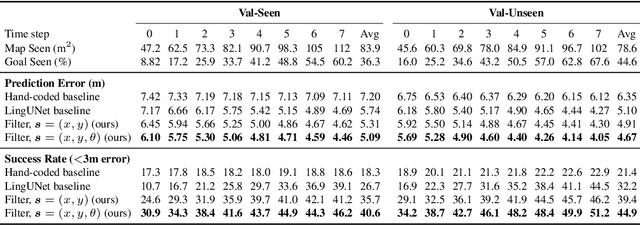
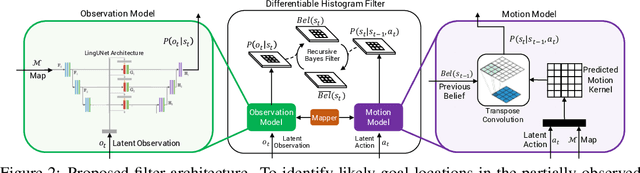
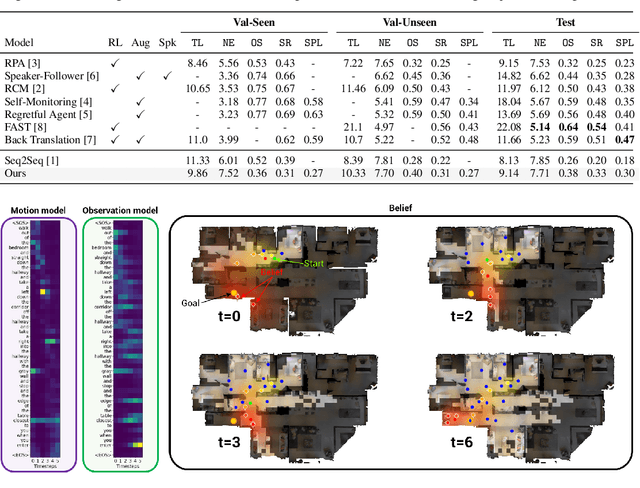
A visually-grounded navigation instruction can be interpreted as a sequence of expected observations and actions an agent following the correct trajectory would encounter and perform. Based on this intuition, we formulate the problem of finding the goal location in Vision-And-Language Navigation (VLN) within the framework of Bayesian state tracking - learning observation and motion models conditioned on these expectable events. Together with a mapper that constructs a semantic spatial map on-the-fly during navigation, we formulate an end-to-end differentiable Bayes filter and train it to identify the goal by predicting the most likely trajectory through the map according to the instructions. The resulting navigation policy constitutes a new approach to instruction following that explicitly models a probability distribution over states, encoding strong geometric and algorithmic priors while enabling greater explainability. Our experiments show that our approach outperforms strong baselines when predicting the goal location in VLN.
RERERE: Remote Embodied Referring Expressions in Real indoor Environments
Apr 23, 2019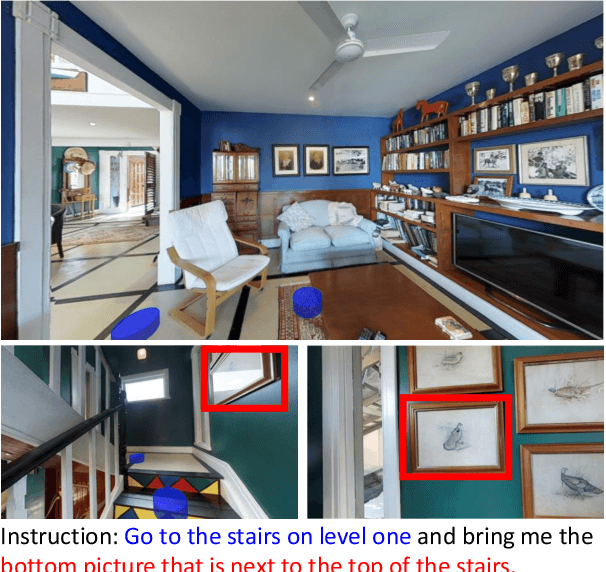
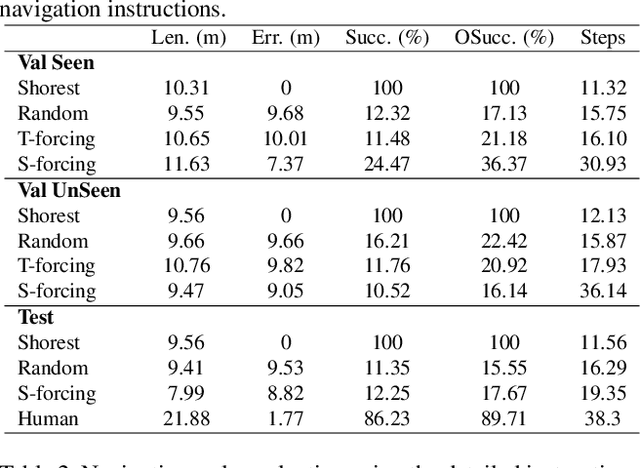
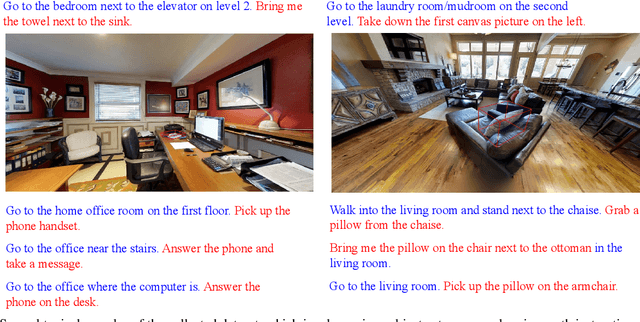
One of the long-term challenges of robotics is to enable humans to communicate with robots about the world. It is essential if they are to collaborate. Humans are visual animals, and we communicate primarily through language, so human-robot communication is inevitably at least partly a vision-and-language problem. This has motivated both Referring Expression datasets, and Vision and Language Navigation datasets. These partition the problem into that of identifying an object of interest, or navigating to another location. Many of the most appealing uses of robots, however, require communication about remote objects and thus do not reflect the dichotomy in the datasets. We thus propose the first Remote Embodied Referring Expression dataset of natural language references to remote objects in real images. Success requires navigating through a previously unseen environment to select an object identified through general natural language. This represents a complex challenge, but one that closely reflects one of the core visual problems in robotics. A Navigator-Pointer model which provides a strong baseline on the task is also proposed.
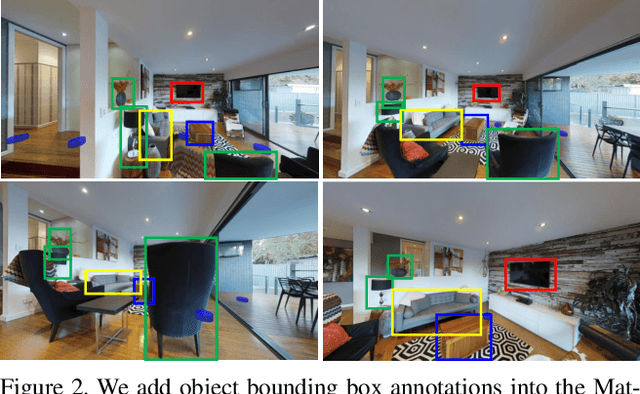
Audio-Visual Scene-Aware Dialog
Jan 25, 2019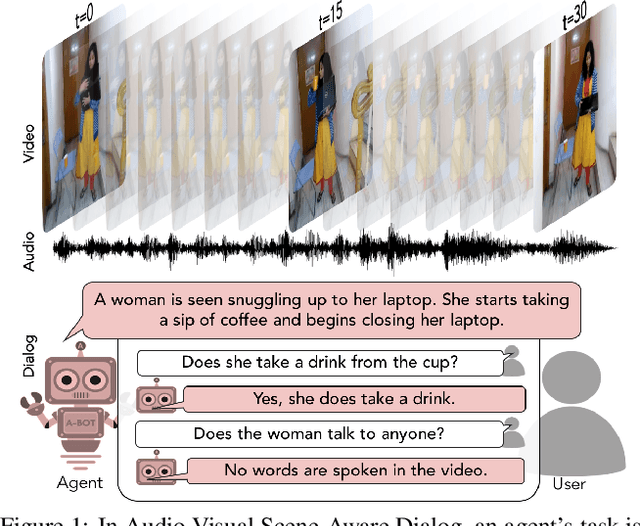
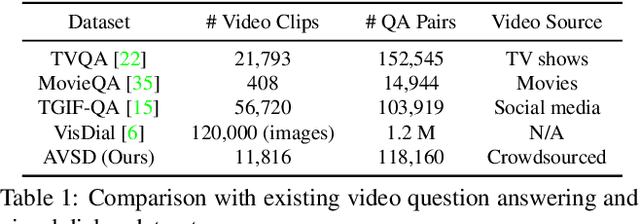
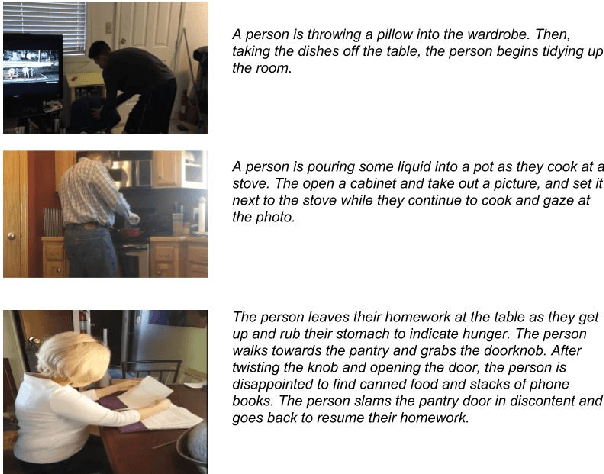

We introduce the task of scene-aware dialog. Given a follow-up question in an ongoing dialog about a video, our goal is to generate a complete and natural response to a question given (a) an input video, and (b) the history of previous turns in the dialog. To succeed, agents must ground the semantics in the video and leverage contextual cues from the history of the dialog to answer the question. To benchmark this task, we introduce the Audio Visual Scene-Aware Dialog (AVSD) dataset. For each of more than 11,000 videos of human actions for the Charades dataset. Our dataset contains a dialog about the video, plus a final summary of the video by one of the dialog participants. We train several baseline systems for this task and evaluate the performance of the trained models using several qualitative and quantitative metrics. Our results indicate that the models must comprehend all the available inputs (video, audio, question and dialog history) to perform well on this dataset.
nocaps: novel object captioning at scale
Dec 20, 2018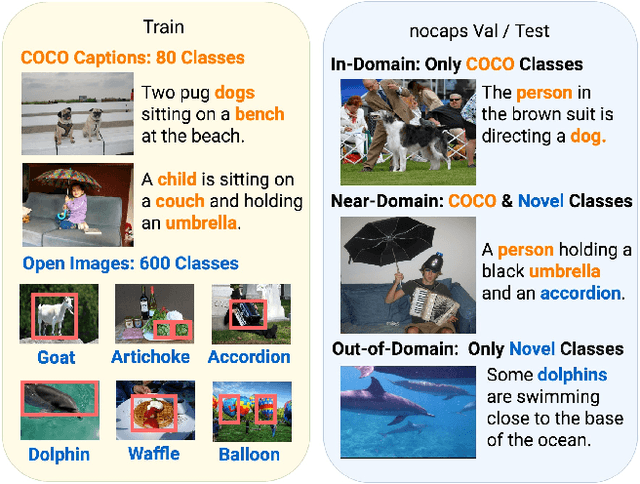
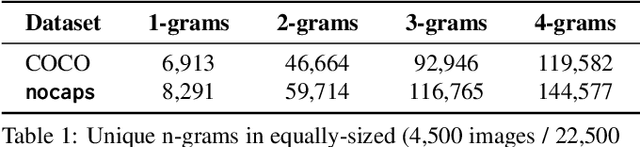
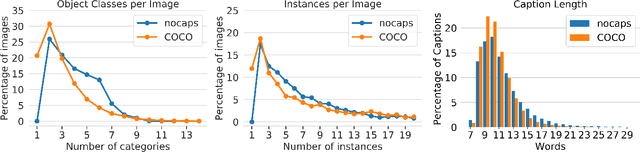
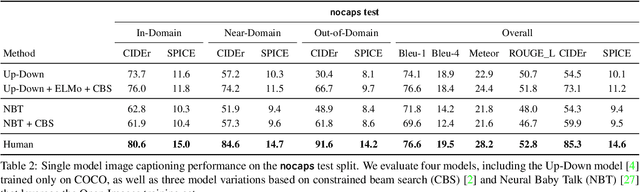
Image captioning models have achieved impressive results on datasets containing limited visual concepts and large amounts of paired image-caption training data. However, if these models are to ever function in the wild, a much larger variety of visual concepts must be learned, ideally from less supervision. To encourage the development of image captioning models that can learn visual concepts from alternative data sources, such as object detection datasets, we present the first large-scale benchmark for this task. Dubbed 'nocaps', for novel object captioning at scale, our benchmark consists of 166,100 human-generated captions describing 15,100 images from the Open Images validation and test sets. The associated training data consists of COCO image-caption pairs, plus Open Images image-level labels and object bounding boxes. Since Open Images contains many more classes than COCO, more than 500 object classes seen in test images have no training captions (hence, nocaps). We evaluate several existing approaches to novel object captioning on our challenging benchmark. In automatic evaluations these approaches show modest improvements over a strong baseline trained only on image-caption data. However, even when using ground-truth object detections, the results are significantly weaker than our human baseline - indicating substantial room for improvement.