 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Game Decision Transformers
May 30, 2022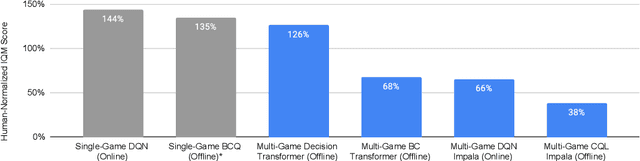

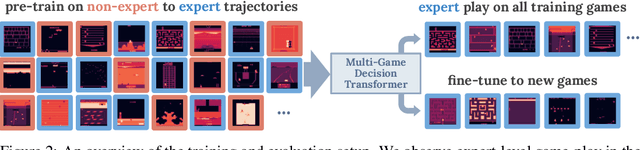
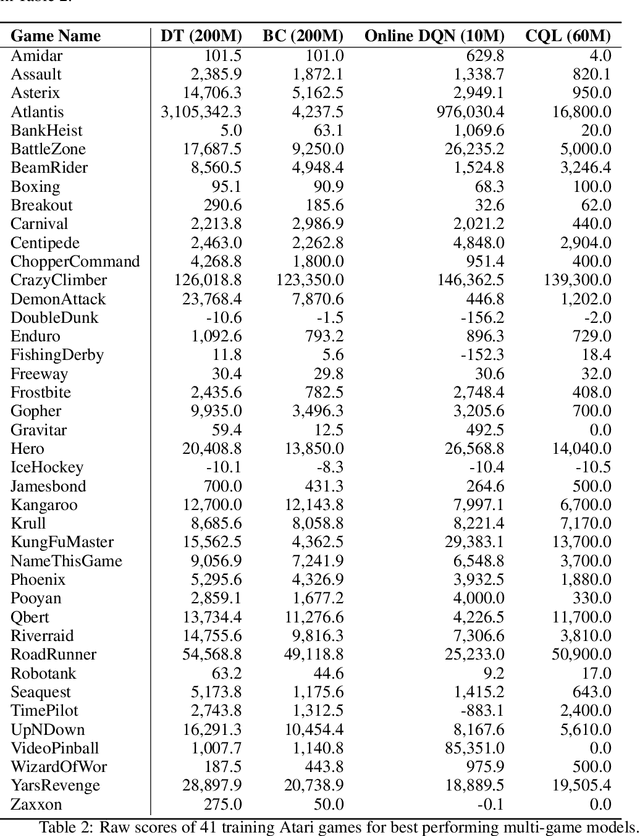
A longstanding goal of the field of AI is a strategy for compiling diverse experience into a highly capable, generalist agent. In the subfields of vision and language, this was largely achieved by scaling up transformer-based models and training them on large, diverse datasets. Motivated by this progress, we investigate whether the same strategy can be used to produce generalist reinforcement learning agents. Specifically, we show that a single transformer-based model - with a single set of weights - trained purely offline can play a suite of up to 46 Atari games simultaneously at close-to-human performance. When trained and evaluated appropriately, we find that the same trends observed in language and vision hold, including scaling of performance with model size and rapid adaptation to new games via fine-tuning. We compare several approaches in this multi-game setting, such as online and offline RL methods and behavioral cloning, and find that our Multi-Game Decision Transformer models offer the best scalability and performance. We release the pre-trained models and code to encourage further research in this direction. Additional information, videos and code can be seen at: sites.google.com/view/multi-game-transformers
Why So Pessimistic? Estimating Uncertainties for Offline RL through Ensembles, and Why Their Independence Matters
May 27, 2022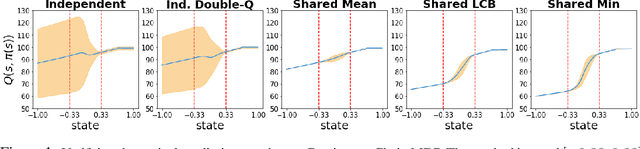
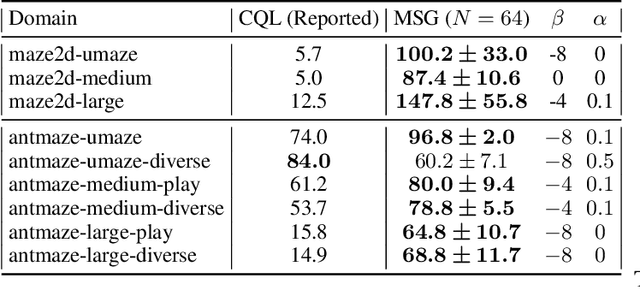

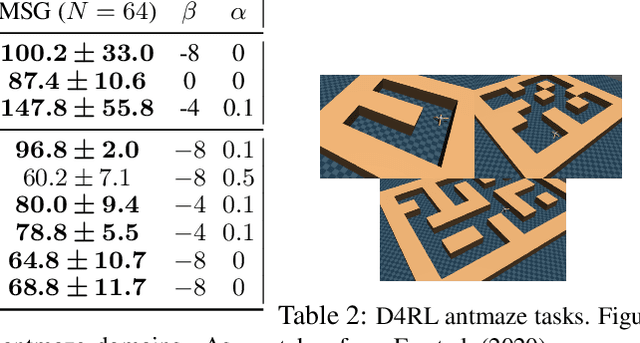
Motivated by the success of ensembles for uncertainty estimation in supervised learning, we take a renewed look at how ensembles of $Q$-functions can be leveraged as the primary source of pessimism for offline reinforcement learning (RL). We begin by identifying a critical flaw in a popular algorithmic choice used by many ensemble-based RL algorithms, namely the use of shared pessimistic target values when computing each ensemble member's Bellman error. Through theoretical analyses and construction of examples in toy MDPs, we demonstrate that shared pessimistic targets can paradoxically lead to value estimates that are effectively optimistic. Given this result, we propose MSG, a practical offline RL algorithm that trains an ensemble of $Q$-functions with independently computed targets based on completely separate networks, and optimizes a policy with respect to the lower confidence bound of predicted action values. Our experiments on the popular D4RL and RL Unplugged offline RL benchmarks demonstrate that on challenging domains such as antmazes, MSG with deep ensembles surpasses highly well-tuned state-of-the-art methods by a wide margin. Additionally, through ablations on benchmarks domains, we verify the critical significance of using independently trained $Q$-functions, and study the role of ensemble size. Finally, as using separate networks per ensemble member can become computationally costly with larger neural network architectures, we investigate whether efficient ensemble approximations developed for supervised learning can be similarly effective, and demonstrate that they do not match the performance and robustness of MSG with separate networks, highlighting the need for new efforts into efficient uncertainty estimation directed at RL.
Chain of Thought Imitation with Procedure Cloning
May 22, 2022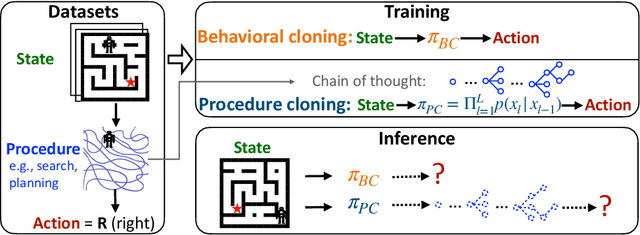
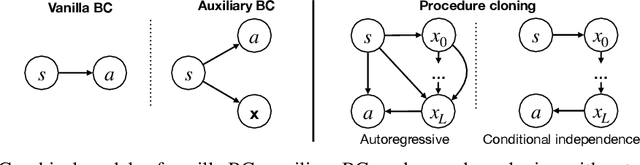
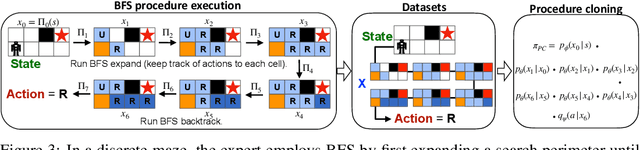
Imitation learning aims to extract high-performance policies from logged demonstrations of expert behavior. It is common to frame imitation learning as a supervised learning problem in which one fits a function approximator to the input-output mapping exhibited by the logged demonstrations (input observations to output actions). While the framing of imitation learning as a supervised input-output learning problem allows for applicability in a wide variety of settings, it is also an overly simplistic view of the problem in situations where the expert demonstrations provide much richer insight into expert behavior. For example, applications such as path navigation, robot manipulation, and strategy games acquire expert demonstrations via planning, search, or some other multi-step algorithm, revealing not just the output action to be imitated but also the procedure for how to determine this action. While these intermediate computations may use tools not available to the agent during inference (e.g., environment simulators), they are nevertheless informative as a way to explain an expert's mapping of state to actions. To properly leverage expert procedure information without relying on the privileged tools the expert may have used to perform the procedure, we propose procedure cloning, which applies supervised sequence prediction to imitate the series of expert computations. This way, procedure cloning learns not only what to do (i.e., the output action), but how and why to do it (i.e., the procedure). Through empirical analysis on navigation, simulated robotic manipulation, and game-playing environments, we show that imitating the intermediate computations of an expert's behavior enables procedure cloning to learn policies exhibiting significant generalization to unseen environment configurations, including those configurations for which running the expert's procedure directly is infeasible.
Why Should I Trust You, Bellman? The Bellman Error is a Poor Replacement for Value Error
Jan 28, 2022
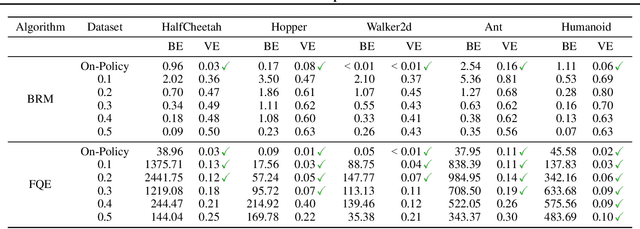
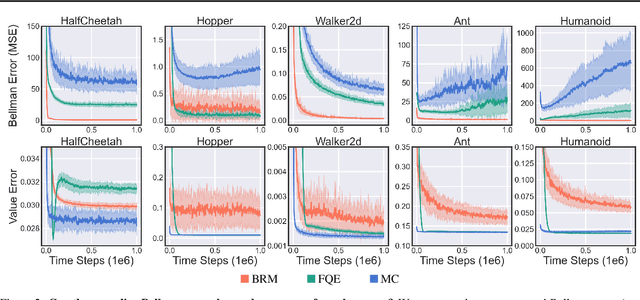
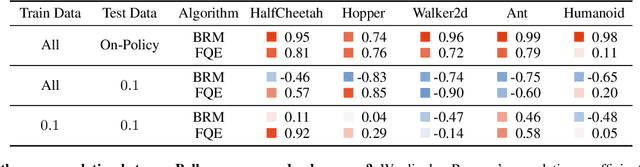
In this work, we study the use of the Bellman equation as a surrogate objective for value prediction accuracy. While the Bellman equation is uniquely solved by the true value function over all state-action pairs, we find that the Bellman error (the difference between both sides of the equation) is a poor proxy for the accuracy of the value function. In particular, we show that (1) due to cancellations from both sides of the Bellman equation, the magnitude of the Bellman error is only weakly related to the distance to the true value function, even when considering all state-action pairs, and (2) in the finite data regime, the Bellman equation can be satisfied exactly by infinitely many suboptimal solutions. This means that the Bellman error can be minimized without improving the accuracy of the value function. We demonstrate these phenomena through a series of propositions, illustrative toy examples, and empirical analysis in standard benchmark domains.
Model Selection in Batch Policy Optimization
Dec 23, 2021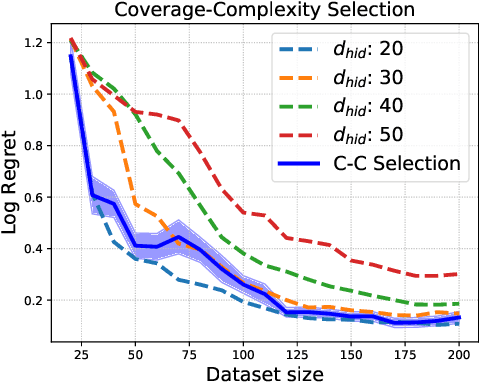
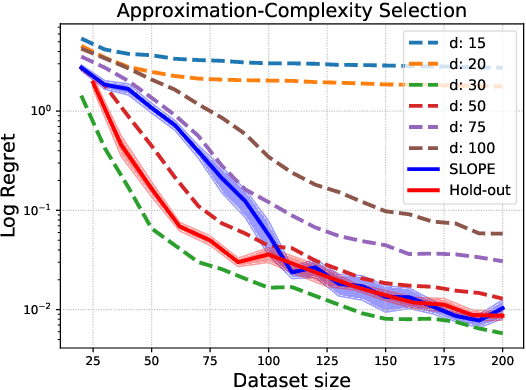
We study the problem of model selection in batch policy optimization: given a fixed, partial-feedback dataset and $M$ model classes, learn a policy with performance that is competitive with the policy derived from the best model class. We formalize the problem in the contextual bandit setting with linear model classes by identifying three sources of error that any model selection algorithm should optimally trade-off in order to be competitive: (1) approximation error, (2) statistical complexity, and (3) coverage. The first two sources are common in model selection for supervised learning, where optimally trading-off these properties is well-studied. In contrast, the third source is unique to batch policy optimization and is due to dataset shift inherent to the setting. We first show that no batch policy optimization algorithm can achieve a guarantee addressing all three simultaneously, revealing a stark contrast between difficulties in batch policy optimization and the positive results available in supervised learning. Despite this negative result, we show that relaxing any one of the three error sources enables the design of algorithms achieving near-oracle inequalities for the remaining two. We conclude with experiments demonstrating the efficacy of these algorithms.
Improving Zero-shot Generalization in Offline Reinforcement Learning using Generalized Similarity Functions
Nov 29, 2021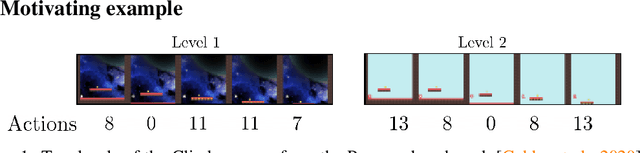
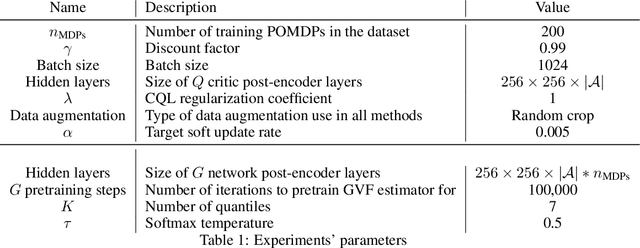
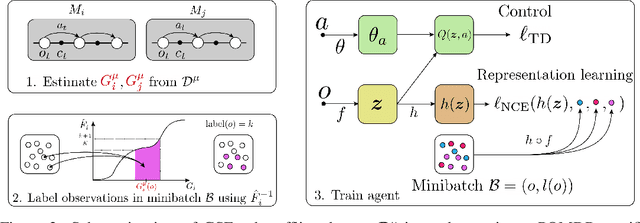
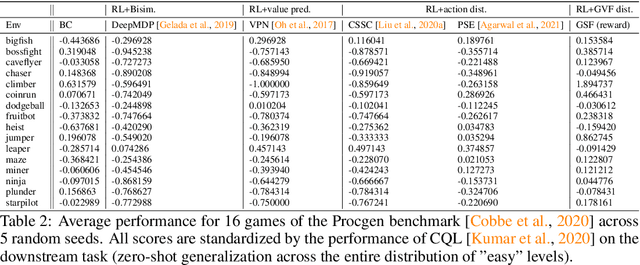
Reinforcement learning (RL) agents are widely used for solving complex sequential decision making tasks, but still exhibit difficulty in generalizing to scenarios not seen during training. While prior online approaches demonstrated that using additional signals beyond the reward function can lead to better generalization capabilities in RL agents, i.e. using self-supervised learning (SSL), they struggle in the offline RL setting, i.e. learning from a static dataset. We show that performance of online algorithms for generalization in RL can be hindered in the offline setting due to poor estimation of similarity between observations. We propose a new theoretically-motivated framework called Generalized Similarity Functions (GSF), which uses contrastive learning to train an offline RL agent to aggregate observations based on the similarity of their expected future behavior, where we quantify this similarity using \emph{generalized value functions}. We show that GSF is general enough to recover existing SSL objectives while also improving zero-shot generalization performance on a complex offline RL benchmark, offline Procgen.
TRAIL: Near-Optimal Imitation Learning with Suboptimal Data
Oct 27, 2021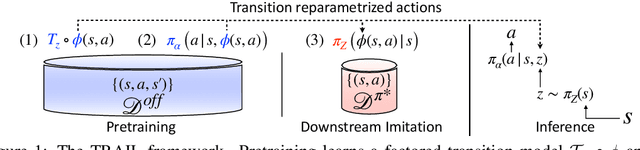
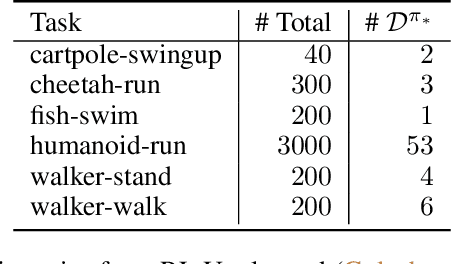


The aim in imitation learning is to learn effective policies by utilizing near-optimal expert demonstrations. However, high-quality demonstrations from human experts can be expensive to obtain in large numbers. On the other hand, it is often much easier to obtain large quantities of suboptimal or task-agnostic trajectories, which are not useful for direct imitation, but can nevertheless provide insight into the dynamical structure of the environment, showing what could be done in the environment even if not what should be done. We ask the question, is it possible to utilize such suboptimal offline datasets to facilitate provably improved downstream imitation learning? In this work, we answer this question affirmatively and present training objectives that use offline datasets to learn a factored transition model whose structure enables the extraction of a latent action space. Our theoretical analysis shows that the learned latent action space can boost the sample-efficiency of downstream imitation learning, effectively reducing the need for large near-optimal expert datasets through the use of auxiliary non-expert data. To learn the latent action space in practice, we propose TRAIL (Transition-Reparametrized Actions for Imitation Learning), an algorithm that learns an energy-based transition model contrastively, and uses the transition model to reparametrize the action space for sample-efficient imitation learning. We evaluate the practicality of our objective through experiments on a set of navigation and locomotion tasks. Our results verify the benefits suggested by our theory and show that TRAIL is able to improve baseline imitation learning by up to 4x in performance.
Policy Gradients Incorporating the Future
Aug 11, 2021

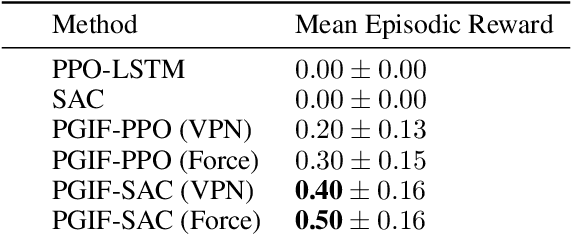

Reasoning about the future -- understanding how decisions in the present time affect outcomes in the future -- is one of the central challenges for reinforcement learning (RL), especially in highly-stochastic or partially observable environments. While predicting the future directly is hard, in this work we introduce a method that allows an agent to "look into the future" without explicitly predicting it. Namely, we propose to allow an agent, during its training on past experience, to observe what \emph{actually} happened in the future at that time, while enforcing an information bottleneck to avoid the agent overly relying on this privileged information. This gives our agent the opportunity to utilize rich and useful information about the future trajectory dynamics in addition to the present. Our method, Policy Gradients Incorporating the Future (PGIF), is easy to implement and versatile, being applicable to virtually any policy gradient algorithm. We apply our proposed method to a number of off-the-shelf RL algorithms and show that PGIF is able to achieve higher reward faster in a variety of online and offline RL domains, as well as sparse-reward and partially observable environments.
Provable Representation Learning for Imitation with Contrastive Fourier Features
May 26, 2021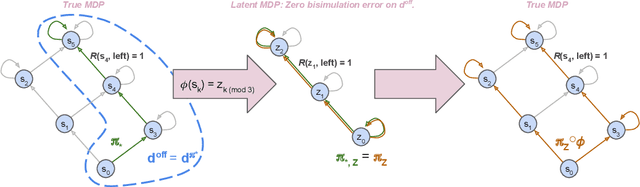
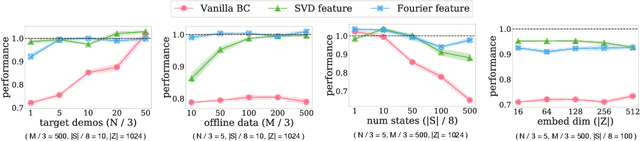
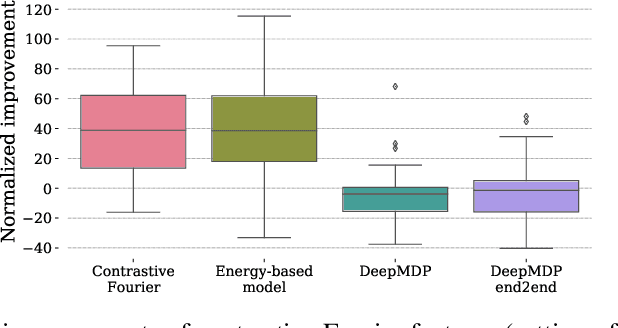
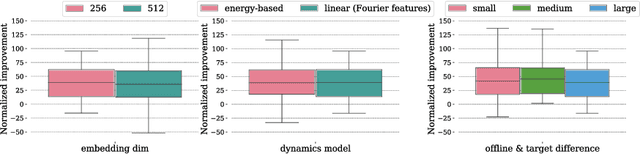
In imitation learning, it is common to learn a behavior policy to match an unknown target policy via max-likelihood training on a collected set of target demonstrations. In this work, we consider using offline experience datasets - potentially far from the target distribution - to learn low-dimensional state representations that provably accelerate the sample-efficiency of downstream imitation learning. A central challenge in this setting is that the unknown target policy itself may not exhibit low-dimensional behavior, and so there is a potential for the representation learning objective to alias states in which the target policy acts differently. Circumventing this challenge, we derive a representation learning objective which provides an upper bound on the performance difference between the target policy and a lowdimensional policy trained with max-likelihood, and this bound is tight regardless of whether the target policy itself exhibits low-dimensional structure. Moving to the practicality of our method, we show that our objective can be implemented as contrastive learning, in which the transition dynamics are approximated by either an implicit energy-based model or, in some special cases, an implicit linear model with representations given by random Fourier features. Experiments on both tabular environments and high-dimensional Atari games provide quantitative evidence for the practical benefits of our proposed objective.
Autoregressive Dynamics Models for Offline Policy Evaluation and Optimization
Apr 28, 2021

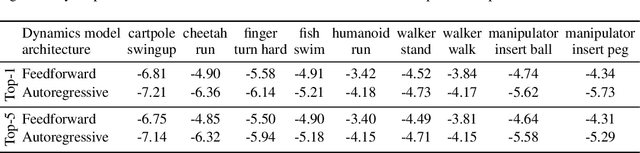

Standard dynamics models for continuous control make use of feedforward computation to predict the conditional distribution of next state and reward given current state and action using a multivariate Gaussian with a diagonal covariance structure. This modeling choice assumes that different dimensions of the next state and reward are conditionally independent given the current state and action and may be driven by the fact that fully observable physics-based simulation environments entail deterministic transition dynamics. In this paper, we challenge this conditional independence assumption and propose a family of expressive autoregressive dynamics models that generate different dimensions of the next state and reward sequentially conditioned on previous dimensions. We demonstrate that autoregressive dynamics models indeed outperform standard feedforward models in log-likelihood on heldout transitions. Furthermore, we compare different model-based and model-free off-policy evaluation (OPE) methods on RL Unplugged, a suite of offline MuJoCo datasets, and find that autoregressive dynamics models consistently outperform all baselines, achieving a new state-of-the-art. Finally, we show that autoregressive dynamics models are useful for offline policy optimization by serving as a way to enrich the replay buffer through data augmentation and improving performance using model-based planning.