 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTemporal Latent Bottleneck: Synthesis of Fast and Slow Processing Mechanisms in Sequence Learning
May 30, 2022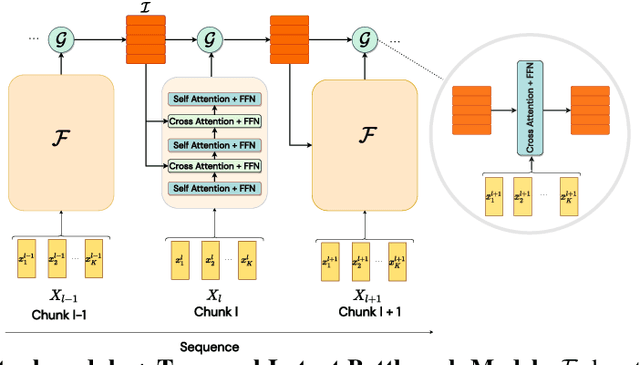
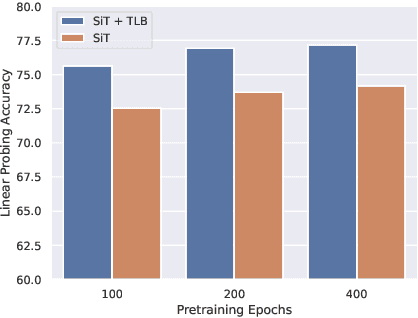
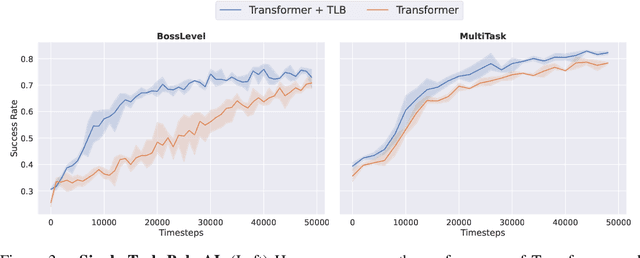
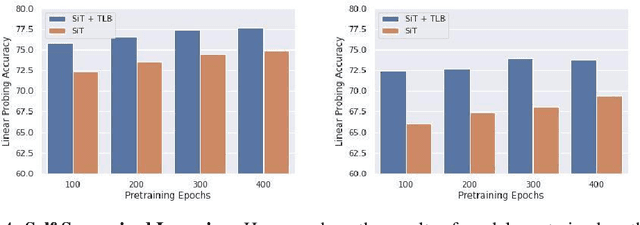
Recurrent neural networks have a strong inductive bias towards learning temporally compressed representations, as the entire history of a sequence is represented by a single vector. By contrast, Transformers have little inductive bias towards learning temporally compressed representations, as they allow for attention over all previously computed elements in a sequence. Having a more compressed representation of a sequence may be beneficial for generalization, as a high-level representation may be more easily re-used and re-purposed and will contain fewer irrelevant details. At the same time, excessive compression of representations comes at the cost of expressiveness. We propose a solution which divides computation into two streams. A slow stream that is recurrent in nature aims to learn a specialized and compressed representation, by forcing chunks of $K$ time steps into a single representation which is divided into multiple vectors. At the same time, a fast stream is parameterized as a Transformer to process chunks consisting of $K$ time-steps conditioned on the information in the slow-stream. In the proposed approach we hope to gain the expressiveness of the Transformer, while encouraging better compression and structuring of representations in the slow stream. We show the benefits of the proposed method in terms of improved sample efficiency and generalization performance as compared to various competitive baselines for visual perception and sequential decision making tasks.
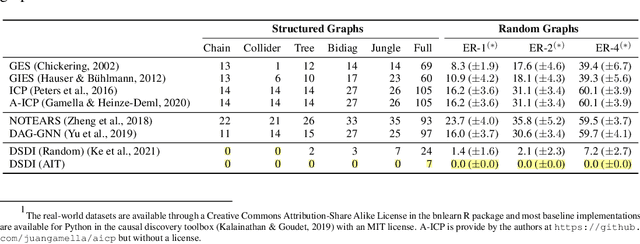
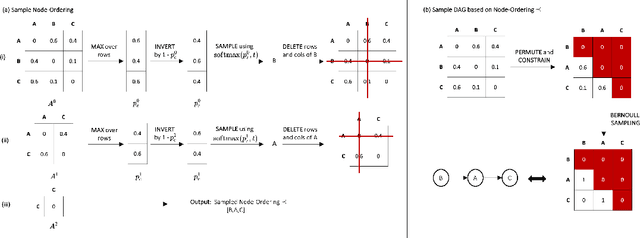
Learning to Induce Causal Structure
Apr 11, 2022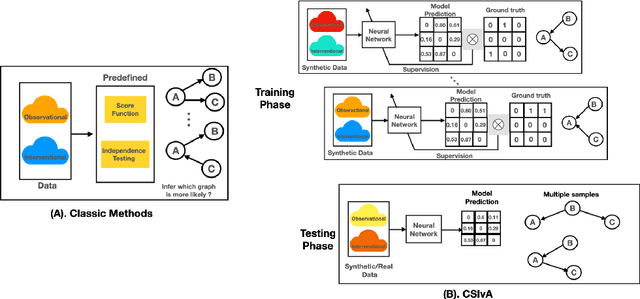
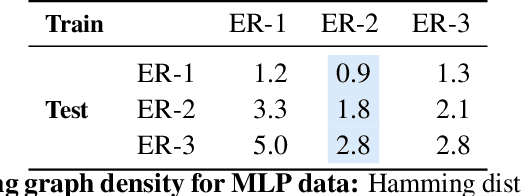
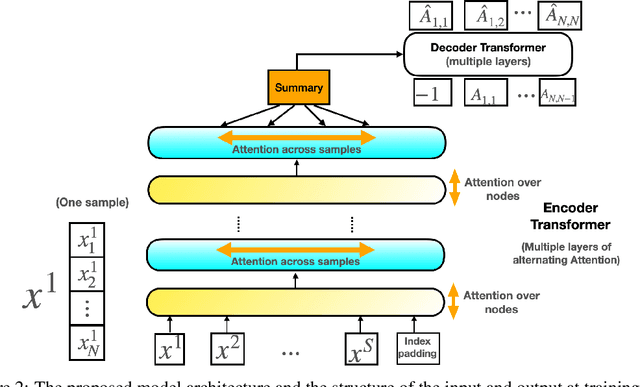
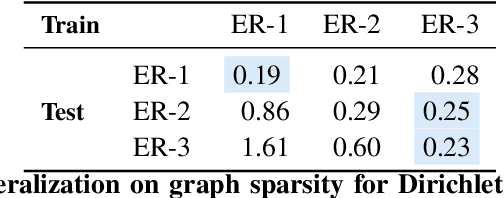
The fundamental challenge in causal induction is to infer the underlying graph structure given observational and/or interventional data. Most existing causal induction algorithms operate by generating candidate graphs and then evaluating them using either score-based methods (including continuous optimization) or independence tests. In this work, instead of proposing scoring function or independence tests, we treat the inference process as a black box and design a neural network architecture that learns the mapping from both observational and interventional data to graph structures via supervised training on synthetic graphs. We show that the proposed model generalizes not only to new synthetic graphs but also to naturalistic graphs.
Retrieval-Augmented Reinforcement Learning
Mar 09, 2022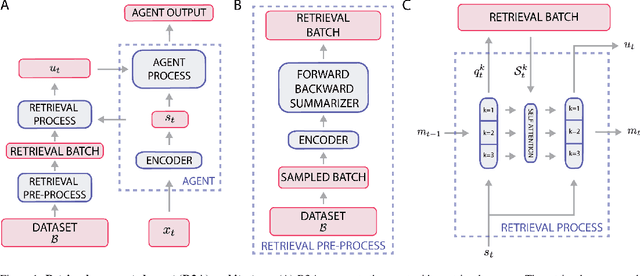
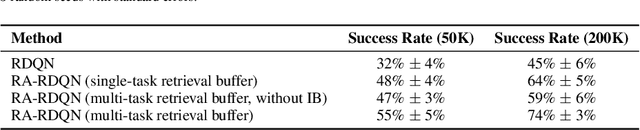
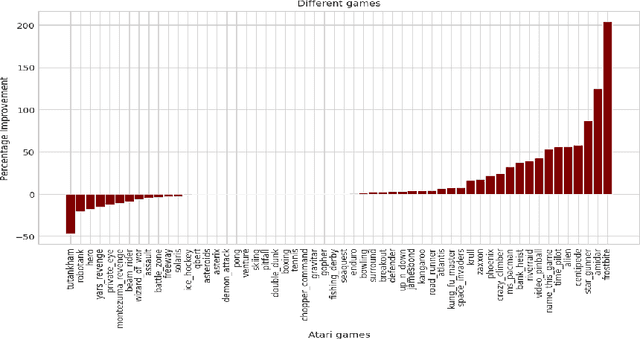
Most deep reinforcement learning (RL) algorithms distill experience into parametric behavior policies or value functions via gradient updates. While effective, this approach has several disadvantages: (1) it is computationally expensive, (2) it can take many updates to integrate experiences into the parametric model, (3) experiences that are not fully integrated do not appropriately influence the agent's behavior, and (4) behavior is limited by the capacity of the model. In this paper we explore an alternative paradigm in which we train a network to map a dataset of past experiences to optimal behavior. Specifically, we augment an RL agent with a retrieval process (parameterized as a neural network) that has direct access to a dataset of experiences. This dataset can come from the agent's past experiences, expert demonstrations, or any other relevant source. The retrieval process is trained to retrieve information from the dataset that may be useful in the current context, to help the agent achieve its goal faster and more efficiently. We integrate our method into two different RL agents: an offline DQN agent and an online R2D2 agent. In offline multi-task problems, we show that the retrieval-augmented DQN agent avoids task interference and learns faster than the baseline DQN agent. On Atari, we show that retrieval-augmented R2D2 learns significantly faster than the baseline R2D2 agent and achieves higher scores. We run extensive ablations to measure the contributions of the components of our proposed method.
Learning Causal Overhypotheses through Exploration in Children and Computational Models
Feb 21, 2022

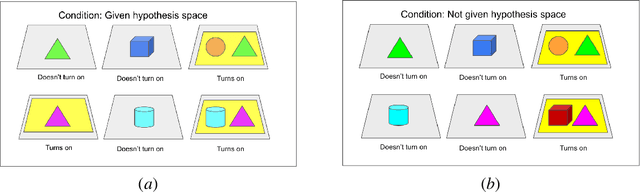

Despite recent progress in reinforcement learning (RL), RL algorithms for exploration still remain an active area of research. Existing methods often focus on state-based metrics, which do not consider the underlying causal structures of the environment, and while recent research has begun to explore RL environments for causal learning, these environments primarily leverage causal information through causal inference or induction rather than exploration. In contrast, human children - some of the most proficient explorers - have been shown to use causal information to great benefit. In this work, we introduce a novel RL environment designed with a controllable causal structure, which allows us to evaluate exploration strategies used by both agents and children in a unified environment. In addition, through experimentation on both computation models and children, we demonstrate that there are significant differences between information-gain optimal RL exploration in causal environments and the exploration of children in the same environments. We conclude with a discussion of how these findings may inspire new directions of research into efficient exploration and disambiguation of causal structures for RL algorithms.
Learning Neural Causal Models with Active Interventions
Sep 06, 2021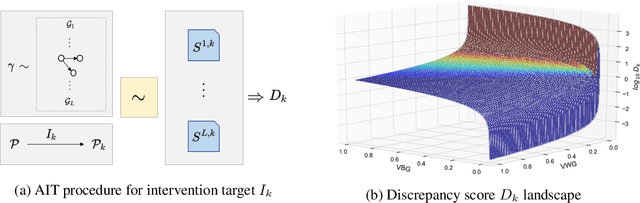
Discovering causal structures from data is a challenging inference problem of fundamental importance in all areas of science. The appealing scaling properties of neural networks have recently led to a surge of interest in differentiable neural network-based methods for learning causal structures from data. So far differentiable causal discovery has focused on static datasets of observational or interventional origin. In this work, we introduce an active intervention-targeting mechanism which enables a quick identification of the underlying causal structure of the data-generating process. Our method significantly reduces the required number of interactions compared with random intervention targeting and is applicable for both discrete and continuous optimization formulations of learning the underlying directed acyclic graph (DAG) from data. We examine the proposed method across a wide range of settings and demonstrate superior performance on multiple benchmarks from simulated to real-world data.
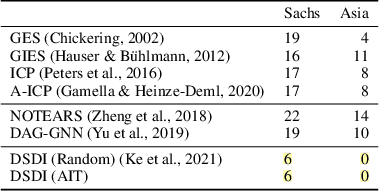
Systematic Evaluation of Causal Discovery in Visual Model Based Reinforcement Learning
Jul 02, 2021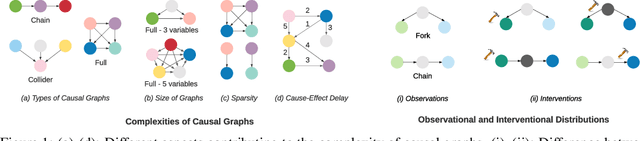
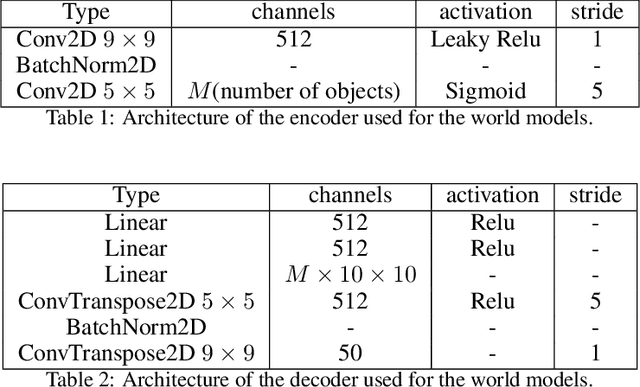
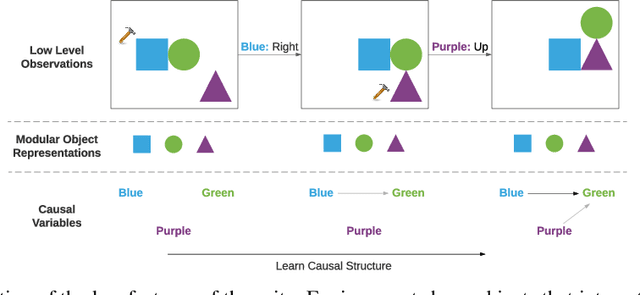
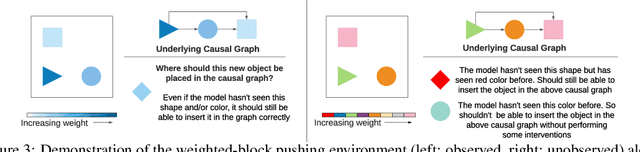
Inducing causal relationships from observations is a classic problem in machine learning. Most work in causality starts from the premise that the causal variables themselves are observed. However, for AI agents such as robots trying to make sense of their environment, the only observables are low-level variables like pixels in images. To generalize well, an agent must induce high-level variables, particularly those which are causal or are affected by causal variables. A central goal for AI and causality is thus the joint discovery of abstract representations and causal structure. However, we note that existing environments for studying causal induction are poorly suited for this objective because they have complicated task-specific causal graphs which are impossible to manipulate parametrically (e.g., number of nodes, sparsity, causal chain length, etc.). In this work, our goal is to facilitate research in learning representations of high-level variables as well as causal structures among them. In order to systematically probe the ability of methods to identify these variables and structures, we design a suite of benchmarking RL environments. We evaluate various representation learning algorithms from the literature and find that explicitly incorporating structure and modularity in models can help causal induction in model-based reinforcement learning.
Fast and Slow Learning of Recurrent Independent Mechanisms
May 19, 2021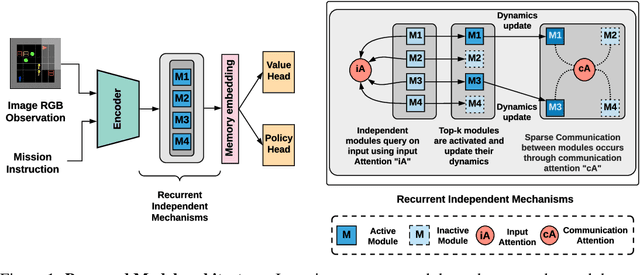
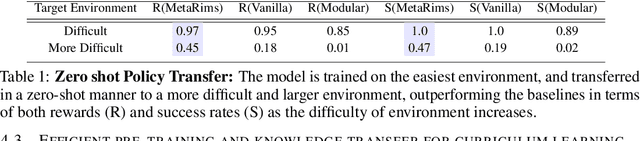
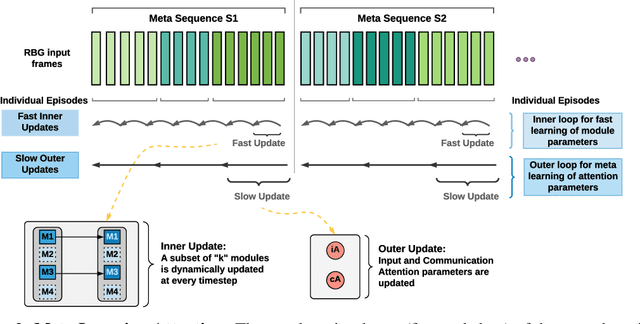
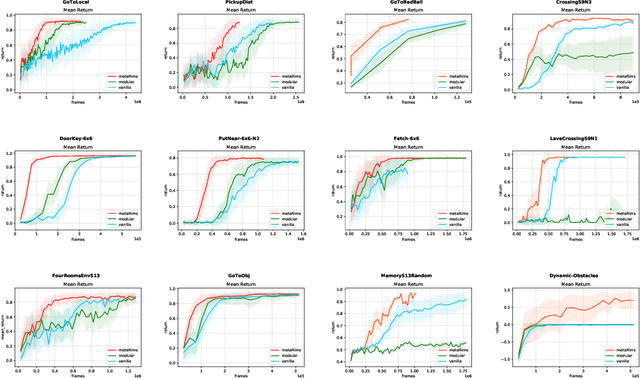
Decomposing knowledge into interchangeable pieces promises a generalization advantage when there are changes in distribution. A learning agent interacting with its environment is likely to be faced with situations requiring novel combinations of existing pieces of knowledge. We hypothesize that such a decomposition of knowledge is particularly relevant for being able to generalize in a systematic manner to out-of-distribution changes. To study these ideas, we propose a particular training framework in which we assume that the pieces of knowledge an agent needs and its reward function are stationary and can be re-used across tasks. An attention mechanism dynamically selects which modules can be adapted to the current task, and the parameters of the selected modules are allowed to change quickly as the learner is confronted with variations in what it experiences, while the parameters of the attention mechanisms act as stable, slowly changing, meta-parameters. We focus on pieces of knowledge captured by an ensemble of modules sparsely communicating with each other via a bottleneck of attention. We find that meta-learning the modular aspects of the proposed system greatly helps in achieving faster adaptation in a reinforcement learning setup involving navigation in a partially observed grid world with image-level input. We also find that reversing the role of parameters and meta-parameters does not work nearly as well, suggesting a particular role for fast adaptation of the dynamically selected modules.
Neural Production Systems
Mar 02, 2021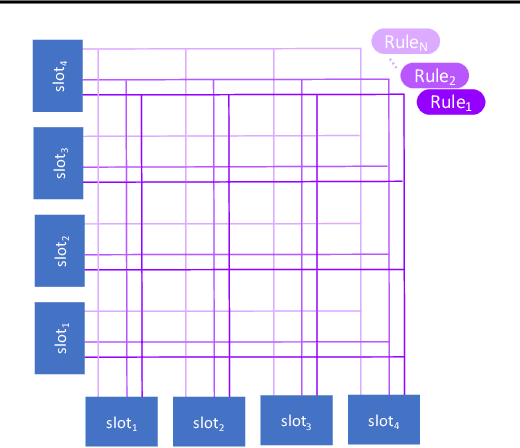

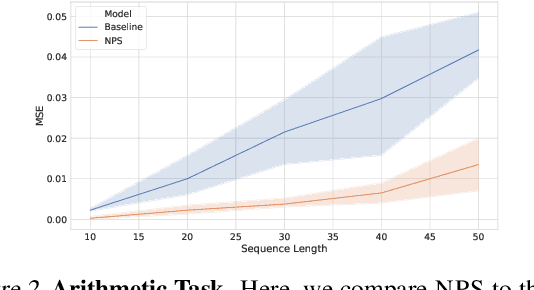
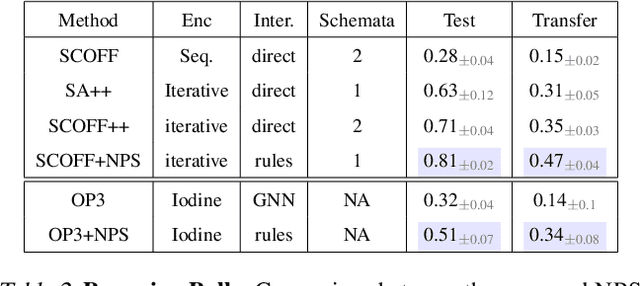
Visual environments are structured, consisting of distinct objects or entities. These entities have properties -- both visible and latent -- that determine the manner in which they interact with one another. To partition images into entities, deep-learning researchers have proposed structural inductive biases such as slot-based architectures. To model interactions among entities, equivariant graph neural nets (GNNs) are used, but these are not particularly well suited to the task for two reasons. First, GNNs do not predispose interactions to be sparse, as relationships among independent entities are likely to be. Second, GNNs do not factorize knowledge about interactions in an entity-conditional manner. As an alternative, we take inspiration from cognitive science and resurrect a classic approach, production systems, which consist of a set of rule templates that are applied by binding placeholder variables in the rules to specific entities. Rules are scored on their match to entities, and the best fitting rules are applied to update entity properties. In a series of experiments, we demonstrate that this architecture achieves a flexible, dynamic flow of control and serves to factorize entity-specific and rule-based information. This disentangling of knowledge achieves robust future-state prediction in rich visual environments, outperforming state-of-the-art methods using GNNs, and allows for the extrapolation from simple (few object) environments to more complex environments.
Coordination Among Neural Modules Through a Shared Global Workspace
Mar 01, 2021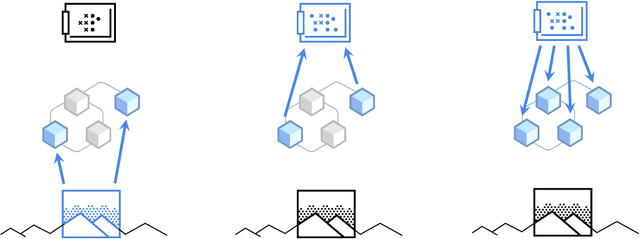
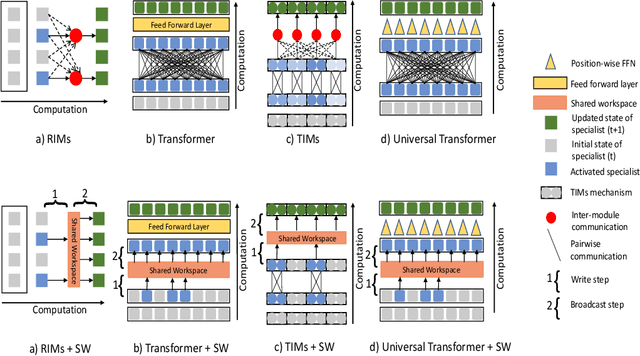
Deep learning has seen a movement away from representing examples with a monolithic hidden state towards a richly structured state. For example, Transformers segment by position, and object-centric architectures decompose images into entities. In all these architectures, interactions between different elements are modeled via pairwise interactions: Transformers make use of self-attention to incorporate information from other positions; object-centric architectures make use of graph neural networks to model interactions among entities. However, pairwise interactions may not achieve global coordination or a coherent, integrated representation that can be used for downstream tasks. In cognitive science, a global workspace architecture has been proposed in which functionally specialized components share information through a common, bandwidth-limited communication channel. We explore the use of such a communication channel in the context of deep learning for modeling the structure of complex environments. The proposed method includes a shared workspace through which communication among different specialist modules takes place but due to limits on the communication bandwidth, specialist modules must compete for access. We show that capacity limitations have a rational basis in that (1) they encourage specialization and compositionality and (2) they facilitate the synchronization of otherwise independent specialists.
Towards Causal Representation Learning
Feb 22, 2021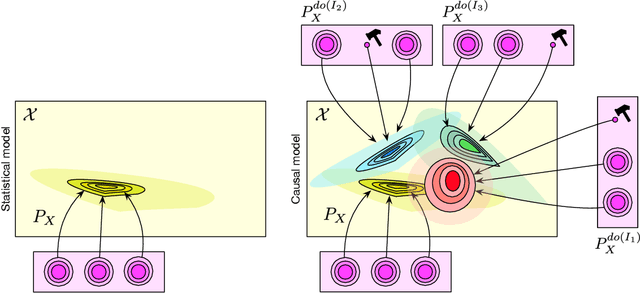
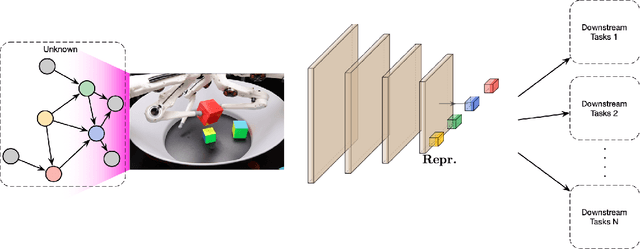
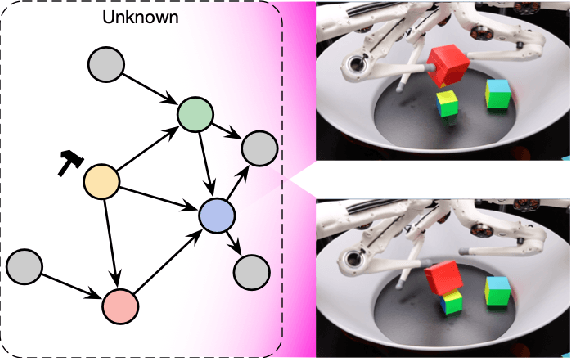

The two fields of machine learning and graphical causality arose and developed separately. However, there is now cross-pollination and increasing interest in both fields to benefit from the advances of the other. In the present paper, we review fundamental concepts of causal inference and relate them to crucial open problems of machine learning, including transfer and generalization, thereby assaying how causality can contribute to modern machine learning research. This also applies in the opposite direction: we note that most work in causality starts from the premise that the causal variables are given. A central problem for AI and causality is, thus, causal representation learning, the discovery of high-level causal variables from low-level observations. Finally, we delineate some implications of causality for machine learning and propose key research areas at the intersection of both communities.