 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing Radar Odometry Beyond the Pavement: Current Capabilities and Challenges
Apr 27, 2026Radar offers unique advantages for localization in unstructured environments, including robustness to weather, lighting, and airborne particulates. While most prior work has studied radar odometry in urban, largely planar settings, its performance in off-road environments remains less understood. In this paper, we investigate the potential of radar for off-road odometry estimation and identify key challenges that arise from full $SE(3)$ vehicle motion, terrain-induced ground returns, and sparse or unstable features. To address these issues, we introduce two simple baselines: Radar-KISSICP, which applies motion compensation to generate 3D-aware radar pointclouds, and Radar-IMU, which leverages IMU preintegration to stabilize scan matching. Experiments on the Great Outdoors (GO) dataset demonstrate that these baselines improve trajectory estimation in challenging routes and provide a reference point for future development of radar odometry in off-road robotics.
Tracking without Seeing: Geospatial Inference using Encrypted Traffic from Distributed Nodes
Mar 29, 2026Accurate observation of dynamic environments traditionally relies on synthesizing raw, signal-level information from multiple distributed sensors. This work investigates an alternative approach: performing geospatial inference using only encrypted packet-level information, without access to the raw sensory data. We further explore how this indirect information can be fused with directly available sensory data to extend overall inference capabilities. We introduce GraySense, a learning-based framework that performs geospatial object tracking by analyzing encrypted wireless video transmission traffic, such as packet sizes, from cameras with inaccessible streams. GraySense leverages the inherent relationship between scene dynamics and transmitted packet sizes to infer object motion. The framework consists of two stages: (1) a Packet Grouping module that identifies frame boundaries and estimates frame sizes from encrypted network traffic, and (2) a Tracker module, based on a Transformer encoder with a recurrent state, which fuses indirect packet-based inputs with optional direct camera-based inputs to estimate the object's position. Extensive experiments with realistic videos from the CARLA simulator and emulated networks under varying conditions show that GraySense achieves 2.33 meters tracking error (Euclidean distance) without raw signal access, within the dimensions of tracked objects (4.61m x 1.93m). To our knowledge, this capability has not been previously demonstrated, expanding the use of latent signals for sensing.
Temporally Consistent Unsupervised Segmentation for Mobile Robot Perception
Jul 29, 2025Rapid progress in terrain-aware autonomous ground navigation has been driven by advances in supervised semantic segmentation. However, these methods rely on costly data collection and labor-intensive ground truth labeling to train deep models. Furthermore, autonomous systems are increasingly deployed in unrehearsed, unstructured environments where no labeled data exists and semantic categories may be ambiguous or domain-specific. Recent zero-shot approaches to unsupervised segmentation have shown promise in such settings but typically operate on individual frames, lacking temporal consistency-a critical property for robust perception in unstructured environments. To address this gap we introduce Frontier-Seg, a method for temporally consistent unsupervised segmentation of terrain from mobile robot video streams. Frontier-Seg clusters superpixel-level features extracted from foundation model backbones-specifically DINOv2-and enforces temporal consistency across frames to identify persistent terrain boundaries or frontiers without human supervision. We evaluate Frontier-Seg on a diverse set of benchmark datasets-including RUGD and RELLIS-3D-demonstrating its ability to perform unsupervised segmentation across unstructured off-road environments.
GO: The Great Outdoors Multimodal Dataset
Jan 31, 2025



The Great Outdoors (GO) dataset is a multi-modal annotated data resource aimed at advancing ground robotics research in unstructured environments. This dataset provides the most comprehensive set of data modalities and annotations compared to existing off-road datasets. In total, the GO dataset includes six unique sensor types with high-quality semantic annotations and GPS traces to support tasks such as semantic segmentation, object detection, and SLAM. The diverse environmental conditions represented in the dataset present significant real-world challenges that provide opportunities to develop more robust solutions to support the continued advancement of field robotics, autonomous exploration, and perception systems in natural environments. The dataset can be downloaded at: https://www.unmannedlab.org/the-great-outdoors-dataset/
M2P2: A Multi-Modal Passive Perception Dataset for Off-Road Mobility in Extreme Low-Light Conditions
Oct 01, 2024



Long-duration, off-road, autonomous missions require robots to continuously perceive their surroundings regardless of the ambient lighting conditions. Most existing autonomy systems heavily rely on active sensing, e.g., LiDAR, RADAR, and Time-of-Flight sensors, or use (stereo) visible light imaging sensors, e.g., color cameras, to perceive environment geometry and semantics. In scenarios where fully passive perception is required and lighting conditions are degraded to an extent that visible light cameras fail to perceive, most downstream mobility tasks such as obstacle avoidance become impossible. To address such a challenge, this paper presents a Multi-Modal Passive Perception dataset, M2P2, to enable off-road mobility in low-light to no-light conditions. We design a multi-modal sensor suite including thermal, event, and stereo RGB cameras, GPS, two Inertia Measurement Units (IMUs), as well as a high-resolution LiDAR for ground truth, with a novel multi-sensor calibration procedure that can efficiently transform multi-modal perceptual streams into a common coordinate system. Our 10-hour, 32 km dataset also includes mobility data such as robot odometry and actions and covers well-lit, low-light, and no-light conditions, along with paved, on-trail, and off-trail terrain. Our results demonstrate that off-road mobility is possible through only passive perception in extreme low-light conditions using end-to-end learning and classical planning. The project website can be found at https://cs.gmu.edu/~xiao/Research/M2P2/
On the Efficiency and Robustness of Vibration-based Foundation Models for IoT Sensing: A Case Study
Apr 03, 2024



This paper demonstrates the potential of vibration-based Foundation Models (FMs), pre-trained with unlabeled sensing data, to improve the robustness of run-time inference in (a class of) IoT applications. A case study is presented featuring a vehicle classification application using acoustic and seismic sensing. The work is motivated by the success of foundation models in the areas of natural language processing and computer vision, leading to generalizations of the FM concept to other domains as well, where significant amounts of unlabeled data exist that can be used for self-supervised pre-training. One such domain is IoT applications. Foundation models for selected sensing modalities in the IoT domain can be pre-trained in an environment-agnostic fashion using available unlabeled sensor data and then fine-tuned to the deployment at hand using a small amount of labeled data. The paper shows that the pre-training/fine-tuning approach improves the robustness of downstream inference and facilitates adaptation to different environmental conditions. More specifically, we present a case study in a real-world setting to evaluate a simple (vibration-based) FM-like model, called FOCAL, demonstrating its superior robustness and adaptation, compared to conventional supervised deep neural networks (DNNs). We also demonstrate its superior convergence over supervised solutions. Our findings highlight the advantages of vibration-based FMs (and FM-inspired selfsupervised models in general) in terms of inference robustness, runtime efficiency, and model adaptation (via fine-tuning) in resource-limited IoT settings.
A Mapping of Assurance Techniques for Learning Enabled Autonomous Systems to the Systems Engineering Lifecycle
Dec 30, 2022
Learning enabled autonomous systems provide increased capabilities compared to traditional systems. However, the complexity of and probabilistic nature in the underlying methods enabling such capabilities present challenges for current systems engineering processes for assurance, and test, evaluation, verification, and validation (TEVV). This paper provides a preliminary attempt to map recently developed technical approaches in the assurance and TEVV of learning enabled autonomous systems (LEAS) literature to a traditional systems engineering v-model. This mapping categorizes such techniques into three main approaches: development, acquisition, and sustainment. We review the latest techniques to develop safe, reliable, and resilient learning enabled autonomous systems, without recommending radical and impractical changes to existing systems engineering processes. By performing this mapping, we seek to assist acquisition professionals by (i) informing comprehensive test and evaluation planning, and (ii) objectively communicating risk to leaders.
NAUTS: Negotiation for Adaptation to Unstructured Terrain Surfaces
Jul 28, 2022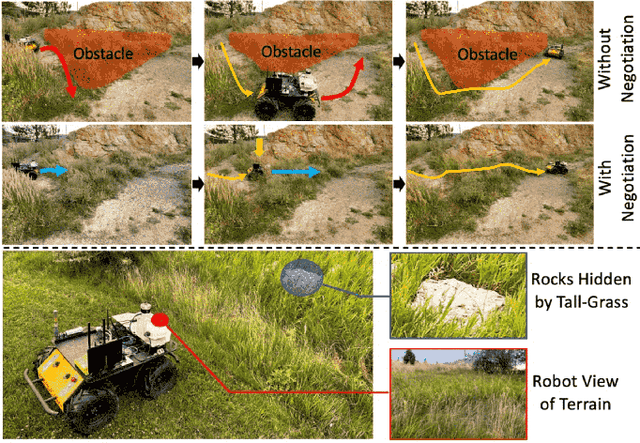
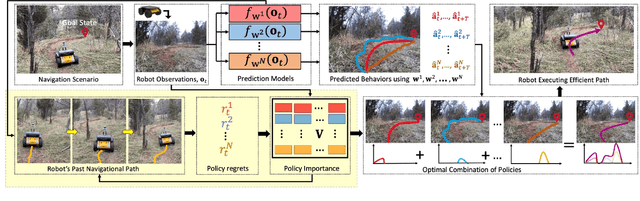
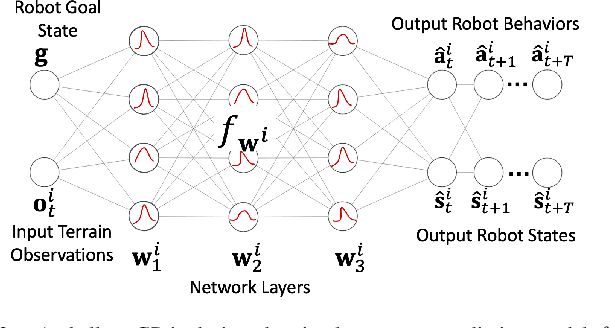
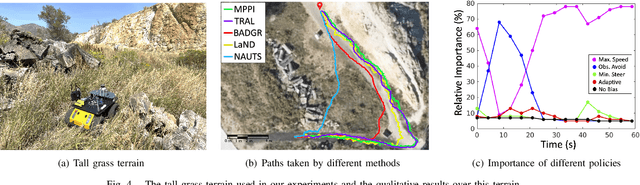
When robots operate in real-world off-road environments with unstructured terrains, the ability to adapt their navigational policy is critical for effective and safe navigation. However, off-road terrains introduce several challenges to robot navigation, including dynamic obstacles and terrain uncertainty, leading to inefficient traversal or navigation failures. To address these challenges, we introduce a novel approach for adaptation by negotiation that enables a ground robot to adjust its navigational behaviors through a negotiation process. Our approach first learns prediction models for various navigational policies to function as a terrain-aware joint local controller and planner. Then, through a new negotiation process, our approach learns from various policies' interactions with the environment to agree on the optimal combination of policies in an online fashion to adapt robot navigation to unstructured off-road terrains on the fly. Additionally, we implement a new optimization algorithm that offers the optimal solution for robot negotiation in real-time during execution. Experimental results have validated that our method for adaptation by negotiation outperforms previous methods for robot navigation, especially over unseen and uncertain dynamic terrains.
Robot navigation from human demonstration: learning control behaviors with environment feature maps
May 06, 2022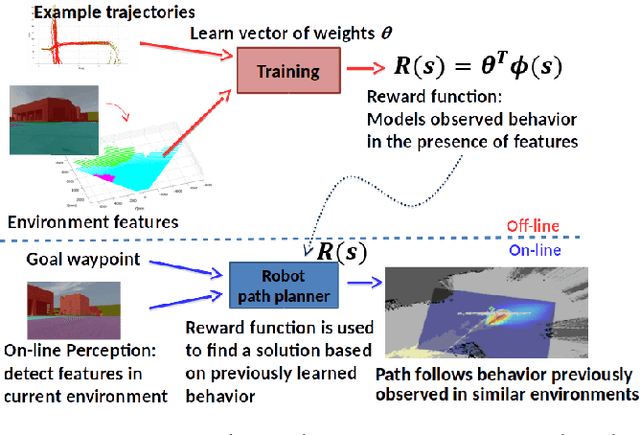
When working alongside human collaborators in dynamic and unstructured environments, such as disaster recovery or military operation, fast field adaptation is necessary for an unmanned ground vehicle (UGV) to perform its duties or learn novel tasks. In these scenarios, personnel and equipment are constrained, making training with minimal human supervision a desirable learning attribute. We address the problem of making UGVs more reliable and adaptable teammates with a novel framework that uses visual perception and inverse optimal control to learn traversal costs for environment features. Through extensive evaluation in a real-world environment, we show that our framework requires few human demonstrated trajectory exemplars to learn feature costs that reliably encode several different traversal behaviors. Additionally, we present an on-line version of the framework that allows a human teammate to intervene during live operation to correct deteriorated behavior or to adapt behavior to dynamic changes in complex and unstructured environments.
Self-Reflective Terrain-Aware Robot Adaptation for Consistent Off-Road Ground Navigation
Nov 12, 2021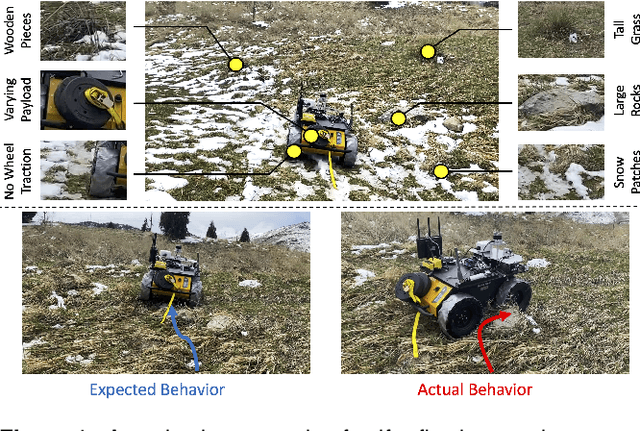
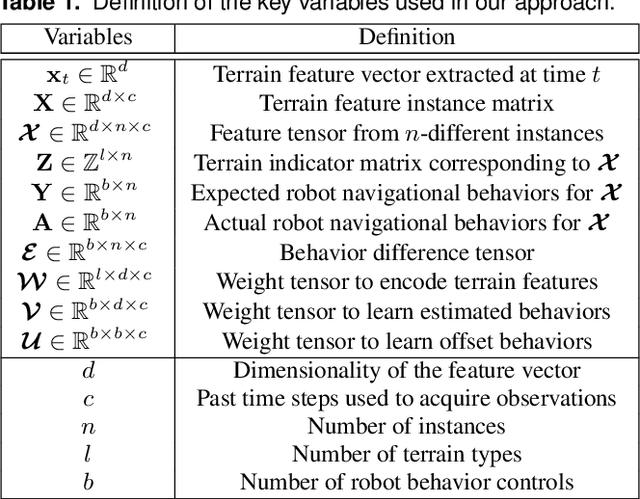


Ground robots require the crucial capability of traversing unstructured and unprepared terrains and avoiding obstacles to complete tasks in real-world robotics applications such as disaster response. When a robot operates in off-road field environments such as forests, the robot's actual behaviors often do not match its expected or planned behaviors, due to changes in the characteristics of terrains and the robot itself. Therefore, the capability of robot adaptation for consistent behavior generation is essential for maneuverability on unstructured off-road terrains. In order to address the challenge, we propose a novel method of self-reflective terrain-aware adaptation for ground robots to generate consistent controls to navigate over unstructured off-road terrains, which enables robots to more accurately execute the expected behaviors through robot self-reflection while adapting to varying unstructured terrains. To evaluate our method's performance, we conduct extensive experiments using real ground robots with various functionality changes over diverse unstructured off-road terrains. The comprehensive experimental results have shown that our self-reflective terrain-aware adaptation method enables ground robots to generate consistent navigational behaviors and outperforms the compared previous and baseline techniques.