 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-Time Model Predictive Control for Industrial Manipulators with Singularity-Tolerant Hierarchical Task Control
Sep 23, 2022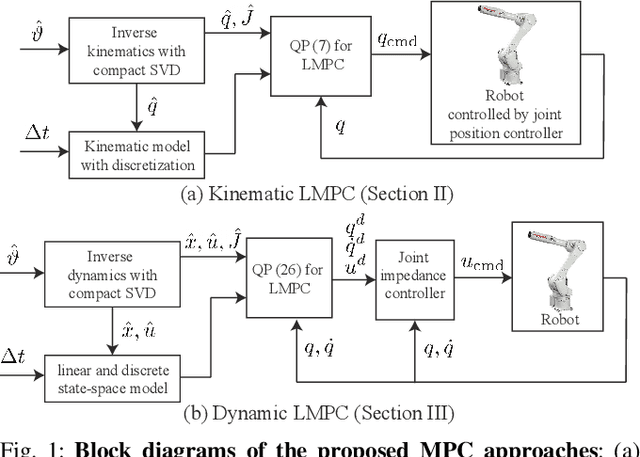
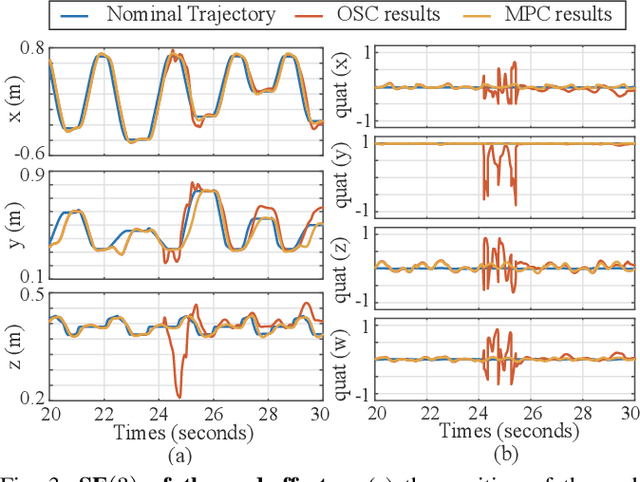
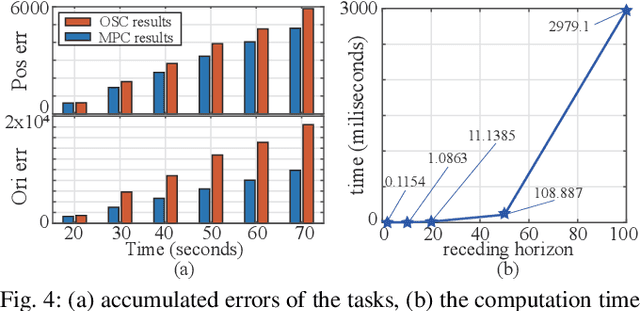
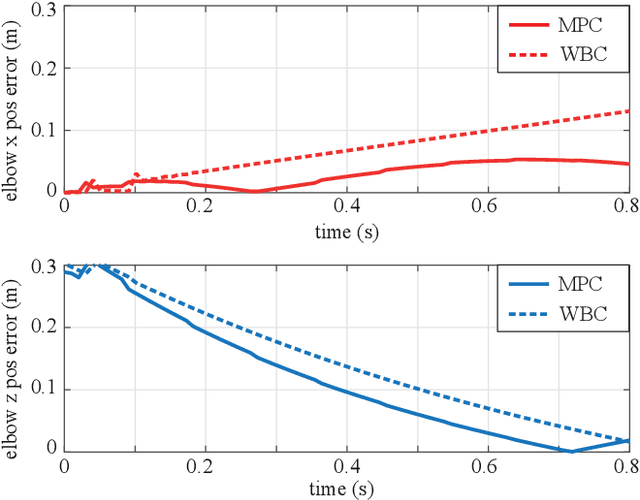
This paper proposes a real-time model predictive control (MPC) scheme to execute multiple tasks using robots over a finite-time horizon. In industrial robotic applications, we must carefully consider multiple constraints for avoiding joint position, velocity, and torque limits. In addition, singularity-free and smooth motions require executing tasks continuously and safely. Instead of formulating nonlinear MPC problems, we devise linear MPC problems using kinematic and dynamic models linearized along nominal trajectories produced by hierarchical controllers. These linear MPC problems are solvable via the use of Quadratic Programming; therefore, we significantly reduce the computation time of the proposed MPC framework so the resulting update frequency is higher than 1 kHz. Our proposed MPC framework is more efficient in reducing task tracking errors than a baseline based on operational space control (OSC). We validate our approach in numerical simulations and in real experiments using an industrial manipulator. More specifically, we deploy our method in two practical scenarios for robotic logistics: 1) controlling a robot carrying heavy payloads while accounting for torque limits, and 2) controlling the end-effector while avoiding singularities.
Learning to Walk by Steering: Perceptive Quadrupedal Locomotion in Dynamic Environments
Sep 19, 2022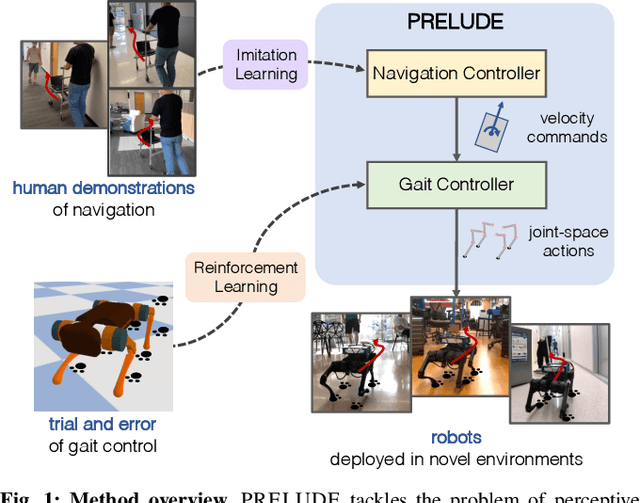

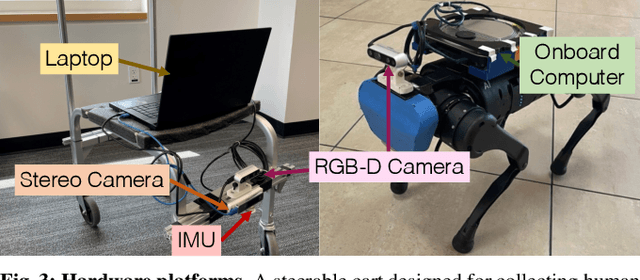
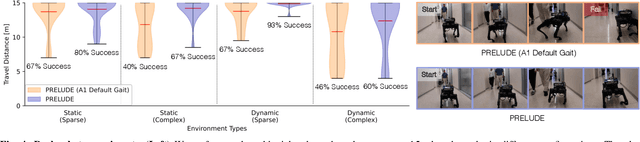
We tackle the problem of perceptive locomotion in dynamic environments. In this problem, a quadrupedal robot must exhibit robust and agile walking behaviors in response to environmental clutter and moving obstacles. We present a hierarchical learning framework, named PRELUDE, which decomposes the problem of perceptive locomotion into high-level decision-making to predict navigation commands and low-level gait generation to realize the target commands. In this framework, we train the high-level navigation controller with imitation learning on human demonstrations collected on a steerable cart and the low-level gait controller with reinforcement learning (RL). Therefore, our method can acquire complex navigation behaviors from human supervision and discover versatile gaits from trial and error. We demonstrate the effectiveness of our approach in simulation and with hardware experiments. Video and code can be found on https://ut-austin-rpl.github.io/PRELUDE.
KC-TSS: An Algorithm for Heterogeneous Robot Teams Performing Resilient Target Search
Mar 02, 2022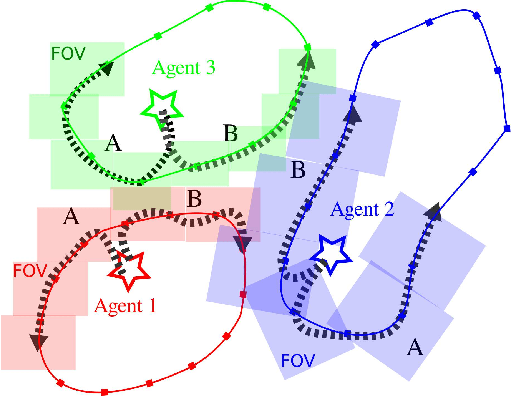
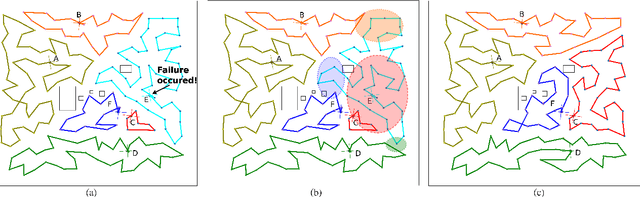
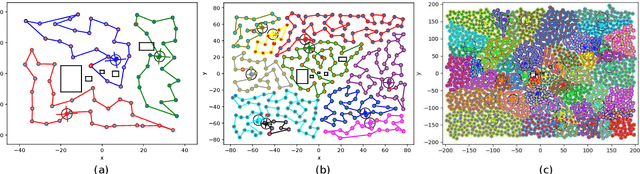
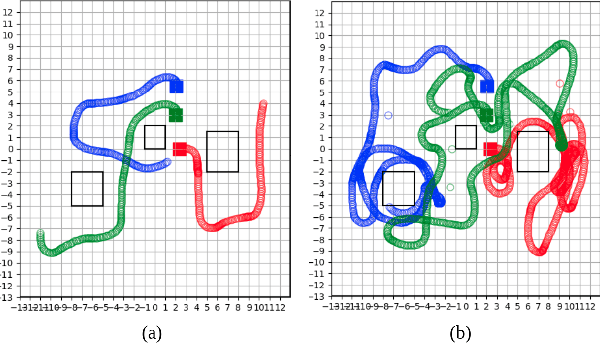
This paper proposes KC-TSS: K-Clustered-Traveling Salesman Based Search, a failure resilient path planning algorithm for heterogeneous robot teams performing target search in human environments. We separate the sample path generation problem into Heterogeneous Clustering and multiple Traveling Salesman Problems. This allows us to provide high-quality candidate paths (i.e. minimal backtracking, overlap) to an Information-Theoretic utility function for each agent. First, we generate waypoint candidates from map knowledge and a target prediction model. All of these candidates are clustered according to the number of agents and their ability to cover space, or coverage competency. Each agent solves a Traveling Salesman Problem (TSP) instance over their assigned cluster and then candidates are fed to a utility function for path selection. We perform extensive Gazebo simulations and preliminary deployment of real robots in indoor search and simulated rescue scenarios with static targets. We compare our proposed method against a state-of-the-art algorithm and show that ours is able to outperform it in mission time. Our method provides resilience in the event of single or multi teammate failure by recomputing global team plans online.
Data-Driven Safety Verification for Legged Robots
Feb 24, 2022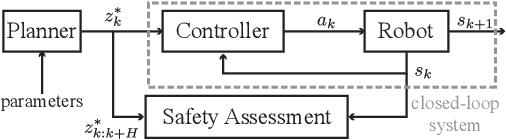
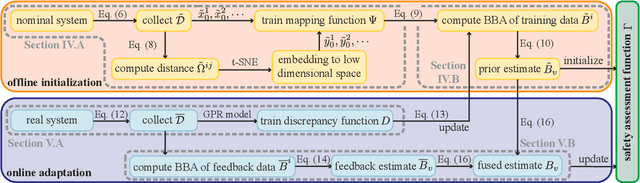
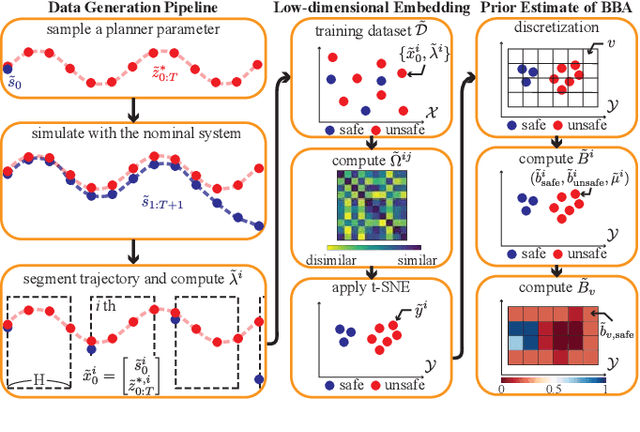
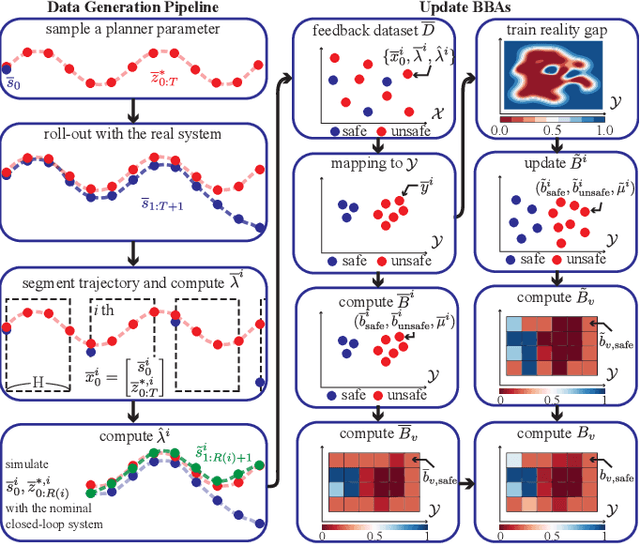
Planning safe motions for legged robots requires sophisticated safety verification tools. However, designing such tools for such complex systems is challenging due to the nonlinear and high-dimensional nature of these systems' dynamics. In this letter, we present a probabilistic verification framework for legged systems, which evaluates the safety of planned trajectories by learning an assessment function from trajectories collected from a closed-loop system. Our approach does not require an analytic expression of the closed-loop dynamics, thus enabling safety verification of systems with complex models and controllers. Our framework consists of an offline stage that initializes a safety assessment function by simulating a nominal model and an online stage that adapts the function to address the sim-to-real gap. The performance of the proposed approach for safety verification is demonstrated using a quadruped balancing task and a humanoid reaching task. The results demonstrate that our framework accurately predicts the systems' safety both at the planning phase to generate robust trajectories and at execution phase to detect unexpected external disturbances.
A Barrier Pair Method for Safe Human-Robot Shared Autonomy
Dec 01, 2021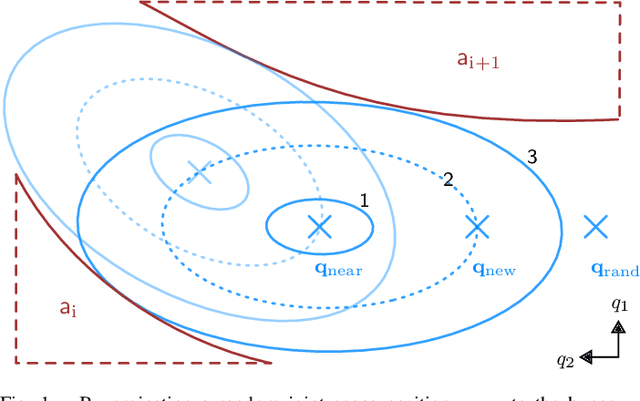
Shared autonomy provides a framework where a human and an automated system, such as a robot, jointly control the system's behavior, enabling an effective solution for various applications, including human-robot interaction. However, a challenging problem in shared autonomy is safety because the human input may be unknown and unpredictable, which affects the robot's safety constraints. If the human input is a force applied through physical contact with the robot, it also alters the robot's behavior to maintain safety. We address the safety issue of shared autonomy in real-time applications by proposing a two-layer control framework. In the first layer, we use the history of human input measurements to infer what the human wants the robot to do and define the robot's safety constraints according to that inference. In the second layer, we formulate a rapidly-exploring random tree of barrier pairs, with each barrier pair composed of a barrier function and a controller. Using the controllers in these barrier pairs, the robot is able to maintain its safe operation under the intervention from the human input. This proposed control framework allows the robot to assist the human while preventing them from encountering safety issues. We demonstrate the proposed control framework on a simulation of a two-linkage manipulator robot.
Information-Theoretic Based Target Search with Multiple Agents
Jul 27, 2021
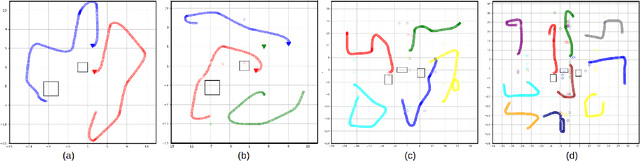
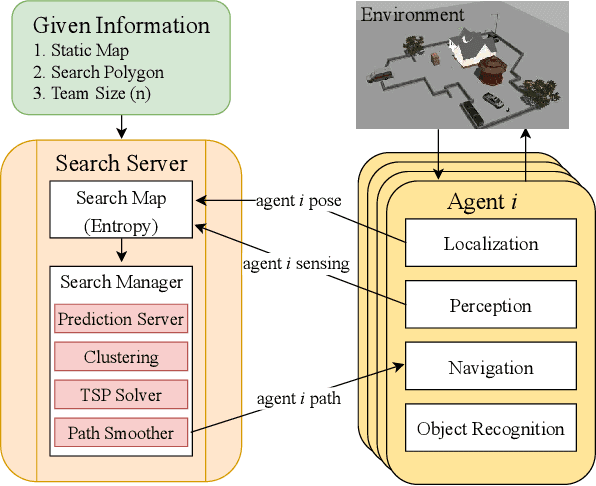
This paper proposes an online path planning and motion generation algorithm for heterogeneous robot teams performing target search in a real-world environment. Path selection for each robot is optimized using an information-theoretic formulation and is computed sequentially for each agent. First, we generate candidate trajectories sampled from both global waypoints derived from vertical cell decomposition and local frontier points. From this set, we choose the path with maximum information gain. We demonstrate that the hierarchical sequential decision-making structure provided by the algorithm is scalable to multiple agents in a simulation setup. We also validate our framework in a real-world apartment setting using a two robot team comprised of the Unitree A1 quadruped and the Toyota HSR mobile manipulator searching for a person. The agents leverage an efficient leader-follower communication structure where only critical information is shared.
Nested Mixture of Experts: Cooperative and Competitive Learning of Hybrid Dynamical System
Nov 20, 2020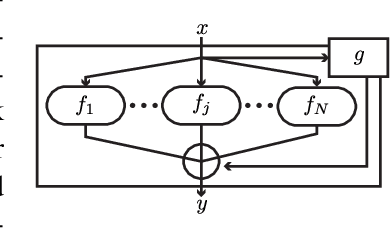
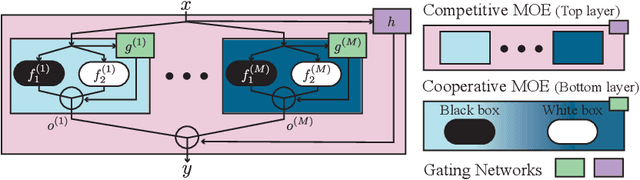


Model-based reinforcement learning (MBRL) algorithms can attain significant sample efficiency but require an appropriate network structure to represent system dynamics. Current approaches include white-box modeling using analytic parameterizations and black-box modeling using deep neural networks. However, both can suffer from a bias-variance trade-off in the learning process, and neither provides a structured method for injecting domain knowledge into the network. As an alternative, gray-box modeling leverages prior knowledge in neural network training but only for simple systems. In this paper, we devise a nested mixture of experts (NMOE) for representing and learning hybrid dynamical systems. An NMOE combines both white-box and black-box models while optimizing bias-variance trade-off. Moreover, an NMOE provides a structured method for incorporating various types of prior knowledge by training the associative experts cooperatively or competitively. The prior knowledge includes information on robots' physical contacts with the environments as well as their kinematic and dynamic properties. In this paper, we demonstrate how to incorporate prior knowledge into our NMOE in various continuous control domains, including hybrid dynamical systems. We also show the effectiveness of our method in terms of data-efficiency, generalization to unseen data, and bias-variance trade-off. Finally, we evaluate our NMOE using an MBRL setup, where the model is integrated with a model-based controller and trained online.
Task-Adaptive Robot Learning from Demonstration under Replication with Gaussian Process Models
Oct 15, 2020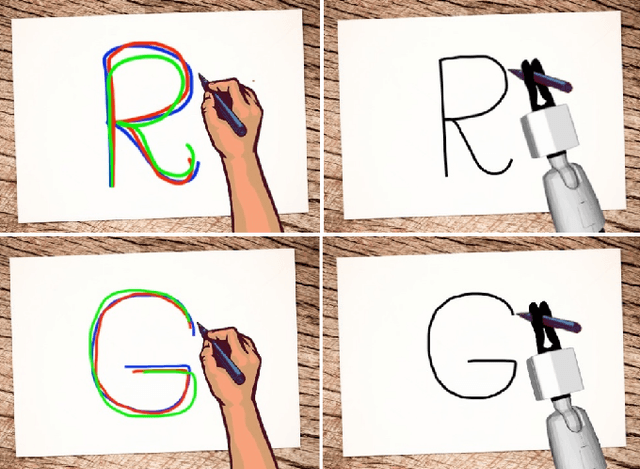
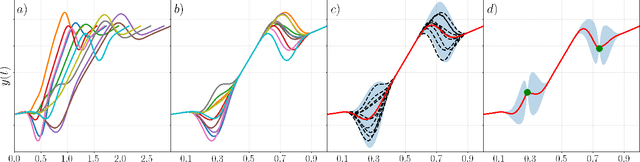
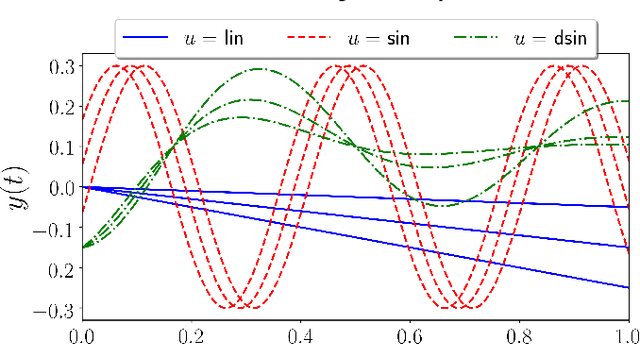
Learning from Demonstration (LfD) is a paradigm that allows robots to learn complex manipulation tasks that can not be easily scripted, but can be demonstrated by a human teacher. One of the challenges of LfD is to enable robots to acquire skills that can be adapted to different scenarios. In this paper, we propose to achieve this by exploiting the variations in the demonstrations to retrieve an adaptive and robust policy, using Gaussian Process (GP) models. Adaptability is enhanced by incorporating task parameters into the model, which encode different specifications within the same task. With our formulation, these parameters can either be real, integer, or categorical. Furthermore, we propose a GP design that exploits the structure of replications, i.e., repeated demonstrations at identical conditions within data. Our method significantly reduces the computational cost of model fitting in complex tasks, where replications are essential to obtain a robust model. We illustrate our approach through several experiments on a handwritten letter demonstration dataset.
A Complex Stiffness Human Impedance Model with Customizable Exoskeleton Control
Sep 25, 2020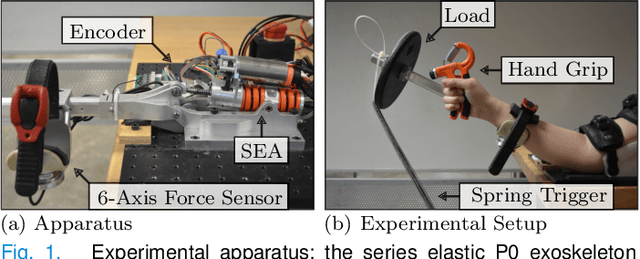
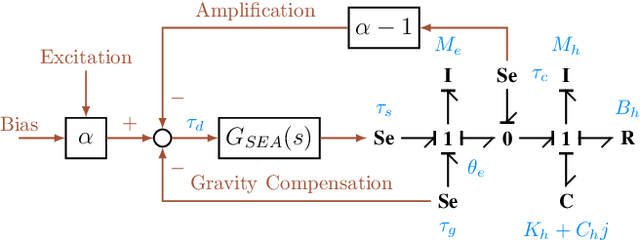
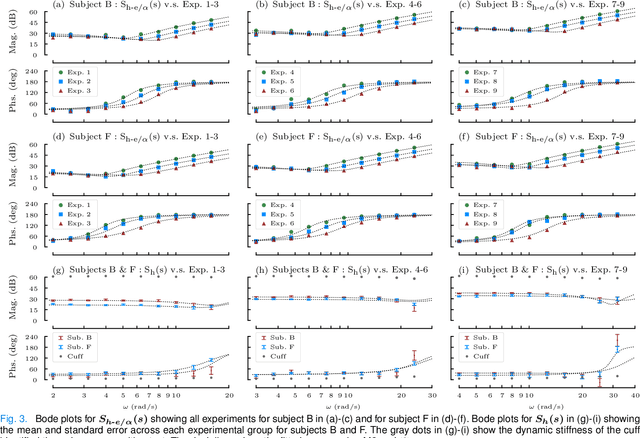
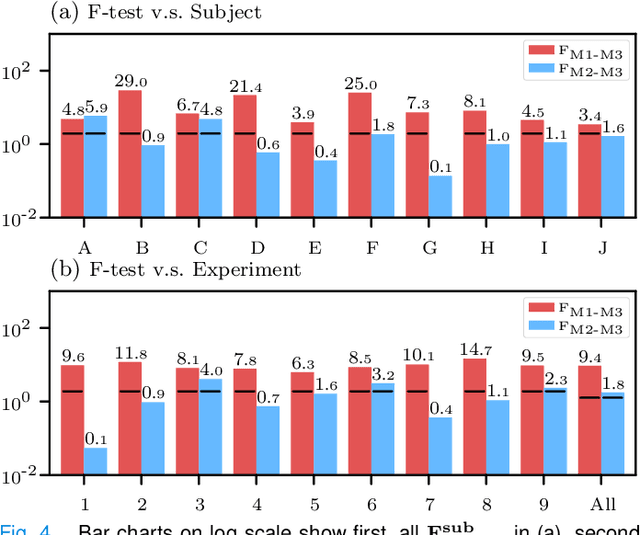
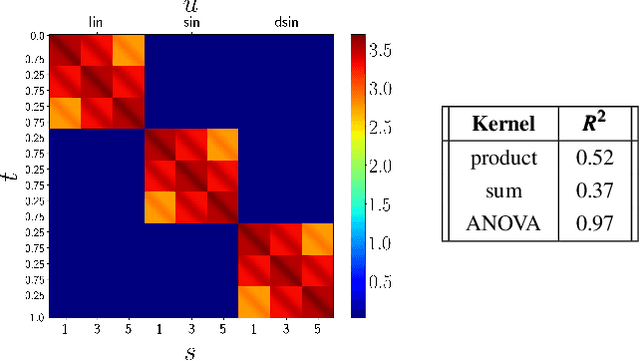
The natural impedance, or dynamic relationship between force and motion, of a human operator can determine the stability of exoskeletons that use interaction-torque feedback to amplify human strength. While human impedance is typically modelled as a linear system, our experiments on a single-joint exoskeleton testbed involving 10 human subjects show evidence of nonlinear behavior: a low-frequency asymptotic phase for the dynamic stiffness of the human that is different than the expected zero, and an unexpectedly consistent damping ratio as the stiffness and inertia vary. To explain these observations, this paper considers a new frequency-domain model of the human joint dynamics featuring complex value stiffness comprising a real stiffness term and a hysteretic damping term. Using a statistical F-test we show that the hysteretic damping term is not only significant but is even more significant than the linear damping term. Further analysis reveals a linear trend linking hysteretic damping and the real part of the stiffness, which allows us to simplify the complex stiffness model down to a 1-parameter system. Then, we introduce and demonstrate a customizable fractional-order controller that exploits this hysteretic damping behavior to improve strength amplification bandwidth while maintaining stability, and explore a tuning approach which ensures that this stability property is robust to muscle co-contraction for each individual.
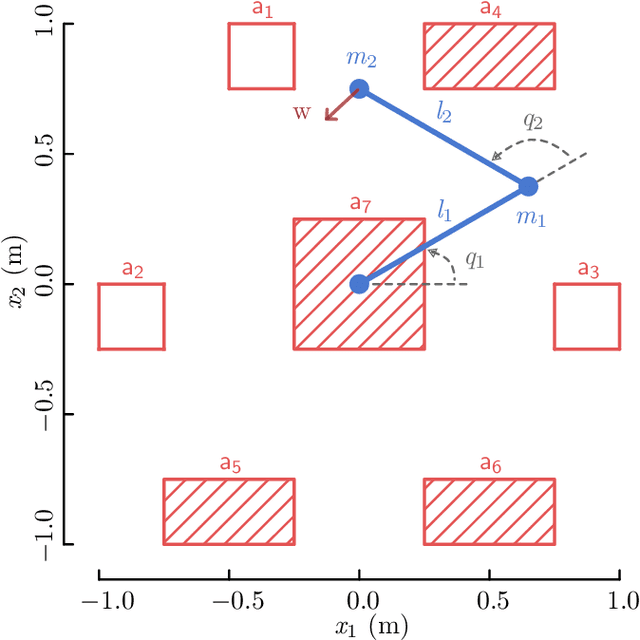
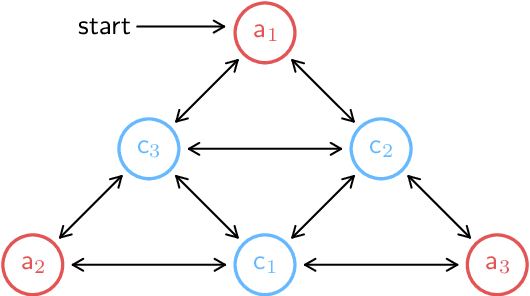
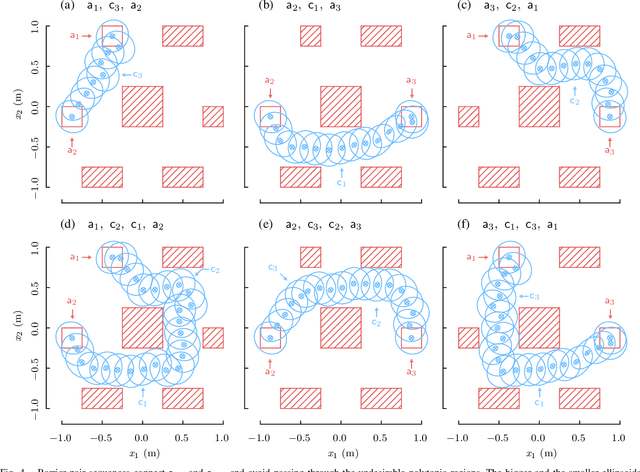
MPC-Based Hierarchical Task Space Control of Underactuated and Constrained Robots for Execution of Multiple Tasks
Sep 13, 2020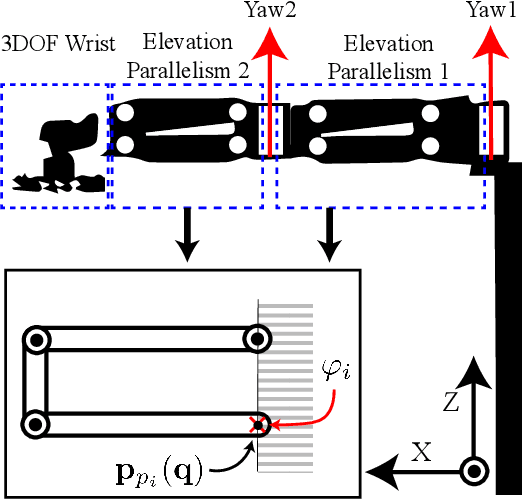
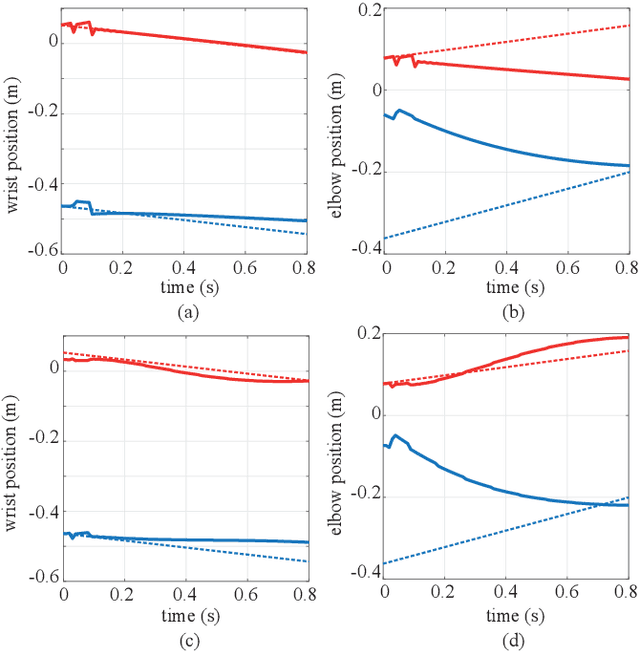
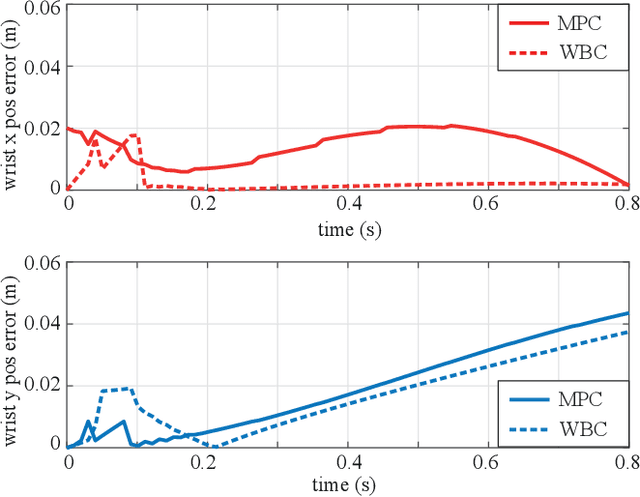
This paper proposes an MPC-based controller to efficiently execute multiple hierarchical tasks for underactuated and constrained robotic systems. Existing task-space controllers or whole-body controllers solve instantaneous optimization problems given task trajectories and the robot plant dynamics. However, the task-space control method we propose here relies on the prediction of future state trajectories and the corresponding costs-to-go terms over a finite time-horizon for computing control commands. We employ acceleration energy error as the performance index for the optimization problem and extend it over the finite-time horizon of our MPC. Our approach employs quadratically constrained quadratic programming, which includes quadratic constraints to handle multiple hierarchical tasks, and is computationally more efficient than nonlinear MPC-based approaches that rely on nonlinear programming. We validate our approach using numerical simulations of a new type of robot manipulator system, which contains underactuated and constrained mechanical structures.