 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmu3.5: Native Multimodal Models are World Learners
Oct 30, 2025We introduce Emu3.5, a large-scale multimodal world model that natively predicts the next state across vision and language. Emu3.5 is pre-trained end-to-end with a unified next-token prediction objective on a corpus of vision-language interleaved data containing over 10 trillion tokens, primarily derived from sequential frames and transcripts of internet videos. The model naturally accepts interleaved vision-language inputs and generates interleaved vision-language outputs. Emu3.5 is further post-trained with large-scale reinforcement learning to enhance multimodal reasoning and generation. To improve inference efficiency, we propose Discrete Diffusion Adaptation (DiDA), which converts token-by-token decoding into bidirectional parallel prediction, accelerating per-image inference by about 20x without sacrificing performance. Emu3.5 exhibits strong native multimodal capabilities, including long-horizon vision-language generation, any-to-image (X2I) generation, and complex text-rich image generation. It also exhibits generalizable world-modeling abilities, enabling spatiotemporally consistent world exploration and open-world embodied manipulation across diverse scenarios and tasks. For comparison, Emu3.5 achieves performance comparable to Gemini 2.5 Flash Image (Nano Banana) on image generation and editing tasks and demonstrates superior results on a suite of interleaved generation tasks. We open-source Emu3.5 at https://github.com/baaivision/Emu3.5 to support community research.
Emu3: Next-Token Prediction is All You Need
Sep 27, 2024



While next-token prediction is considered a promising path towards artificial general intelligence, it has struggled to excel in multimodal tasks, which are still dominated by diffusion models (e.g., Stable Diffusion) and compositional approaches (e.g., CLIP combined with LLMs). In this paper, we introduce Emu3, a new suite of state-of-the-art multimodal models trained solely with next-token prediction. By tokenizing images, text, and videos into a discrete space, we train a single transformer from scratch on a mixture of multimodal sequences. Emu3 outperforms several well-established task-specific models in both generation and perception tasks, surpassing flagship models such as SDXL and LLaVA-1.6, while eliminating the need for diffusion or compositional architectures. Emu3 is also capable of generating high-fidelity video via predicting the next token in a video sequence. We simplify complex multimodal model designs by converging on a singular focus: tokens, unlocking great potential for scaling both during training and inference. Our results demonstrate that next-token prediction is a promising path towards building general multimodal intelligence beyond language. We open-source key techniques and models to support further research in this direction.
EVA-CLIP-18B: Scaling CLIP to 18 Billion Parameters
Feb 06, 2024



Scaling up contrastive language-image pretraining (CLIP) is critical for empowering both vision and multimodal models. We present EVA-CLIP-18B, the largest and most powerful open-source CLIP model to date, with 18-billion parameters. With only 6-billion training samples seen, EVA-CLIP-18B achieves an exceptional 80.7% zero-shot top-1 accuracy averaged across 27 widely recognized image classification benchmarks, outperforming its forerunner EVA-CLIP (5-billion parameters) and other open-source CLIP models by a large margin. Remarkably, we observe a consistent performance improvement with the model size scaling of EVA-CLIP, despite maintaining a constant training dataset of 2-billion image-text pairs from LAION-2B and COYO-700M. This dataset is openly available and much smaller than the in-house datasets (e.g., DFN-5B, WebLI-10B) employed in other state-of-the-art CLIP models. EVA-CLIP-18B demonstrates the potential of EVA-style weak-to-strong visual model scaling. With our model weights made publicly available, we hope to facilitate future research in vision and multimodal foundation models.
Uni3D: Exploring Unified 3D Representation at Scale
Oct 10, 2023



Scaling up representations for images or text has been extensively investigated in the past few years and has led to revolutions in learning vision and language. However, scalable representation for 3D objects and scenes is relatively unexplored. In this work, we present Uni3D, a 3D foundation model to explore the unified 3D representation at scale. Uni3D uses a 2D initialized ViT end-to-end pretrained to align the 3D point cloud features with the image-text aligned features. Via the simple architecture and pretext task, Uni3D can leverage abundant 2D pretrained models as initialization and image-text aligned models as the target, unlocking the great potential of 2D models and scaling-up strategies to the 3D world. We efficiently scale up Uni3D to one billion parameters, and set new records on a broad range of 3D tasks, such as zero-shot classification, few-shot classification, open-world understanding and part segmentation. We show that the strong Uni3D representation also enables applications such as 3D painting and retrieval in the wild. We believe that Uni3D provides a new direction for exploring both scaling up and efficiency of the representation in 3D domain.
A Keypoint-based Global Association Network for Lane Detection
Apr 15, 2022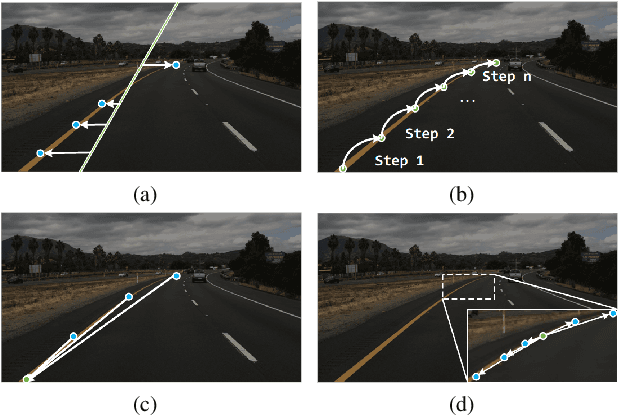

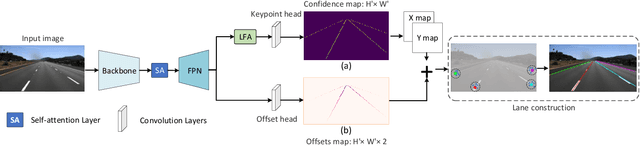
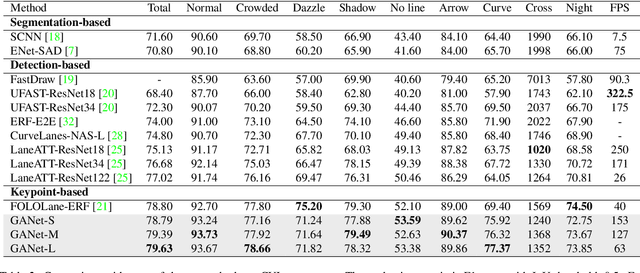
Lane detection is a challenging task that requires predicting complex topology shapes of lane lines and distinguishing different types of lanes simultaneously. Earlier works follow a top-down roadmap to regress predefined anchors into various shapes of lane lines, which lacks enough flexibility to fit complex shapes of lanes due to the fixed anchor shapes. Lately, some works propose to formulate lane detection as a keypoint estimation problem to describe the shapes of lane lines more flexibly and gradually group adjacent keypoints belonging to the same lane line in a point-by-point manner, which is inefficient and time-consuming during postprocessing. In this paper, we propose a Global Association Network (GANet) to formulate the lane detection problem from a new perspective, where each keypoint is directly regressed to the starting point of the lane line instead of point-by-point extension. Concretely, the association of keypoints to their belonged lane line is conducted by predicting their offsets to the corresponding starting points of lanes globally without dependence on each other, which could be done in parallel to greatly improve efficiency. In addition, we further propose a Lane-aware Feature Aggregator (LFA), which adaptively captures the local correlations between adjacent keypoints to supplement local information to the global association. Extensive experiments on two popular lane detection benchmarks show that our method outperforms previous methods with F1 score of 79.63% on CULane and 97.71% on Tusimple dataset with high FPS. The code will be released at https://github.com/Wolfwjs/GANet.