 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini 1.5: Unlocking multimodal understanding across millions of tokens of context
Mar 08, 2024In this report, we present the latest model of the Gemini family, Gemini 1.5 Pro, a highly compute-efficient multimodal mixture-of-experts model capable of recalling and reasoning over fine-grained information from millions of tokens of context, including multiple long documents and hours of video and audio. Gemini 1.5 Pro achieves near-perfect recall on long-context retrieval tasks across modalities, improves the state-of-the-art in long-document QA, long-video QA and long-context ASR, and matches or surpasses Gemini 1.0 Ultra's state-of-the-art performance across a broad set of benchmarks. Studying the limits of Gemini 1.5 Pro's long-context ability, we find continued improvement in next-token prediction and near-perfect retrieval (>99%) up to at least 10M tokens, a generational leap over existing models such as Claude 2.1 (200k) and GPT-4 Turbo (128k). Finally, we highlight surprising new capabilities of large language models at the frontier; when given a grammar manual for Kalamang, a language with fewer than 200 speakers worldwide, the model learns to translate English to Kalamang at a similar level to a person who learned from the same content.
Gemini: A Family of Highly Capable Multimodal Models
Dec 19, 2023This report introduces a new family of multimodal models, Gemini, that exhibit remarkable capabilities across image, audio, video, and text understanding. The Gemini family consists of Ultra, Pro, and Nano sizes, suitable for applications ranging from complex reasoning tasks to on-device memory-constrained use-cases. Evaluation on a broad range of benchmarks shows that our most-capable Gemini Ultra model advances the state of the art in 30 of 32 of these benchmarks - notably being the first model to achieve human-expert performance on the well-studied exam benchmark MMLU, and improving the state of the art in every one of the 20 multimodal benchmarks we examined. We believe that the new capabilities of Gemini models in cross-modal reasoning and language understanding will enable a wide variety of use cases and we discuss our approach toward deploying them responsibly to users.
RoboVQA: Multimodal Long-Horizon Reasoning for Robotics
Nov 01, 2023



We present a scalable, bottom-up and intrinsically diverse data collection scheme that can be used for high-level reasoning with long and medium horizons and that has 2.2x higher throughput compared to traditional narrow top-down step-by-step collection. We collect realistic data by performing any user requests within the entirety of 3 office buildings and using multiple robot and human embodiments. With this data, we show that models trained on all embodiments perform better than ones trained on the robot data only, even when evaluated solely on robot episodes. We find that for a fixed collection budget it is beneficial to take advantage of cheaper human collection along with robot collection. We release a large and highly diverse (29,520 unique instructions) dataset dubbed RoboVQA containing 829,502 (video, text) pairs for robotics-focused visual question answering. We also demonstrate how evaluating real robot experiments with an intervention mechanism enables performing tasks to completion, making it deployable with human oversight even if imperfect while also providing a single performance metric. We demonstrate a single video-conditioned model named RoboVQA-VideoCoCa trained on our dataset that is capable of performing a variety of grounded high-level reasoning tasks in broad realistic settings with a cognitive intervention rate 46% lower than the zero-shot state of the art visual language model (VLM) baseline and is able to guide real robots through long-horizon tasks. The performance gap with zero-shot state-of-the-art models indicates that a lot of grounded data remains to be collected for real-world deployment, emphasizing the critical need for scalable data collection approaches. Finally, we show that video VLMs significantly outperform single-image VLMs with an average error rate reduction of 19% across all VQA tasks. Data and videos available at https://robovqa.github.io
Tree of Thoughts: Deliberate Problem Solving with Large Language Models
May 17, 2023



Language models are increasingly being deployed for general problem solving across a wide range of tasks, but are still confined to token-level, left-to-right decision-making processes during inference. This means they can fall short in tasks that require exploration, strategic lookahead, or where initial decisions play a pivotal role. To surmount these challenges, we introduce a new framework for language model inference, Tree of Thoughts (ToT), which generalizes over the popular Chain of Thought approach to prompting language models, and enables exploration over coherent units of text (thoughts) that serve as intermediate steps toward problem solving. ToT allows LMs to perform deliberate decision making by considering multiple different reasoning paths and self-evaluating choices to decide the next course of action, as well as looking ahead or backtracking when necessary to make global choices. Our experiments show that ToT significantly enhances language models' problem-solving abilities on three novel tasks requiring non-trivial planning or search: Game of 24, Creative Writing, and Mini Crosswords. For instance, in Game of 24, while GPT-4 with chain-of-thought prompting only solved 4% of tasks, our method achieved a success rate of 74%. Code repo with all prompts: https://github.com/ysymyth/tree-of-thought-llm.
AnyTOD: A Programmable Task-Oriented Dialog System
Dec 20, 2022



We propose AnyTOD, an end-to-end task-oriented dialog (TOD) system with zero-shot capability for unseen tasks. We view TOD as a program executed by a language model (LM), where program logic and ontology is provided by a designer in the form of a schema. To enable generalization onto unseen schemas and programs without prior training, AnyTOD adopts a neuro-symbolic approach. A neural LM keeps track of events that occur during a conversation, and a symbolic program implementing the dialog policy is executed to recommend next actions AnyTOD should take. This approach drastically reduces data annotation and model training requirements, addressing a long-standing challenge in TOD research: rapidly adapting a TOD system to unseen tasks and domains. We demonstrate state-of-the-art results on the STAR and ABCD benchmarks, as well as AnyTOD's strong zero-shot transfer capability in low-resource settings. In addition, we release STARv2, an updated version of the STAR dataset with richer data annotations, for benchmarking zero-shot end-to-end TOD models.
Speech Aware Dialog System Technology Challenge (DSTC11)
Dec 16, 2022



Most research on task oriented dialog modeling is based on written text input. However, users interact with practical dialog systems often using speech as input. Typically, systems convert speech into text using an Automatic Speech Recognition (ASR) system, introducing errors. Furthermore, these systems do not address the differences in written and spoken language. The research on this topic is stymied by the lack of a public corpus. Motivated by these considerations, our goal in hosting the speech-aware dialog state tracking challenge was to create a public corpus or task which can be used to investigate the performance gap between the written and spoken forms of input, develop models that could alleviate this gap, and establish whether Text-to-Speech-based (TTS) systems is a reasonable surrogate to the more-labor intensive human data collection. We created three spoken versions of the popular written-domain MultiWoz task -- (a) TTS-Verbatim: written user inputs were converted into speech waveforms using a TTS system, (b) Human-Verbatim: humans spoke the user inputs verbatim, and (c) Human-paraphrased: humans paraphrased the user inputs. Additionally, we provided different forms of ASR output to encourage wider participation from teams that may not have access to state-of-the-art ASR systems. These included ASR transcripts, word time stamps, and latent representations of the audio (audio encoder outputs). In this paper, we describe the corpus, report results from participating teams, provide preliminary analyses of their results, and summarize the current state-of-the-art in this domain.
ReAct: Synergizing Reasoning and Acting in Language Models
Oct 06, 2022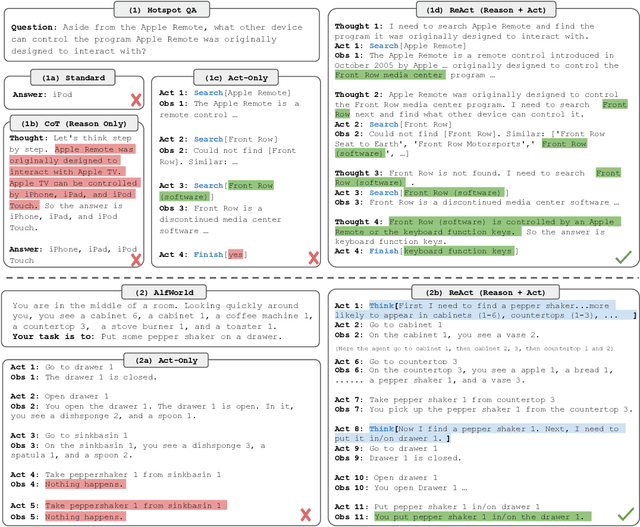
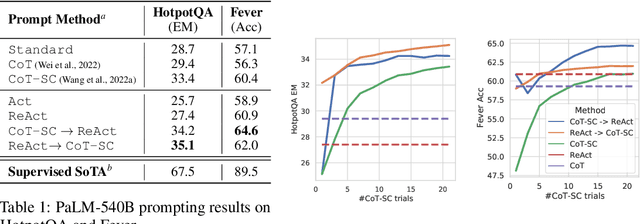
While large language models (LLMs) have demonstrated impressive capabilities across tasks in language understanding and interactive decision making, their abilities for reasoning (e.g. chain-of-thought prompting) and acting (e.g. action plan generation) have primarily been studied as separate topics. In this paper, we explore the use of LLMs to generate both reasoning traces and task-specific actions in an interleaved manner, allowing for greater synergy between the two: reasoning traces help the model induce, track, and update action plans as well as handle exceptions, while actions allow it to interface with external sources, such as knowledge bases or environments, to gather additional information. We apply our approach, named ReAct, to a diverse set of language and decision making tasks and demonstrate its effectiveness over state-of-the-art baselines, as well as improved human interpretability and trustworthiness over methods without reasoning or acting components. Concretely, on question answering (HotpotQA) and fact verification (Fever), ReAct overcomes issues of hallucination and error propagation prevalent in chain-of-thought reasoning by interacting with a simple Wikipedia API, and generates human-like task-solving trajectories that are more interpretable than baselines without reasoning traces. On two interactive decision making benchmarks (ALFWorld and WebShop), ReAct outperforms imitation and reinforcement learning methods by an absolute success rate of 34% and 10% respectively, while being prompted with only one or two in-context examples.
N-Grammer: Augmenting Transformers with latent n-grams
Jul 13, 2022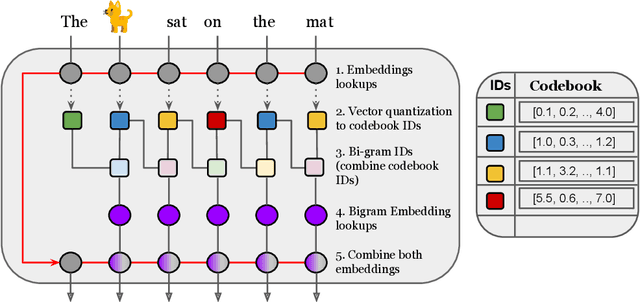
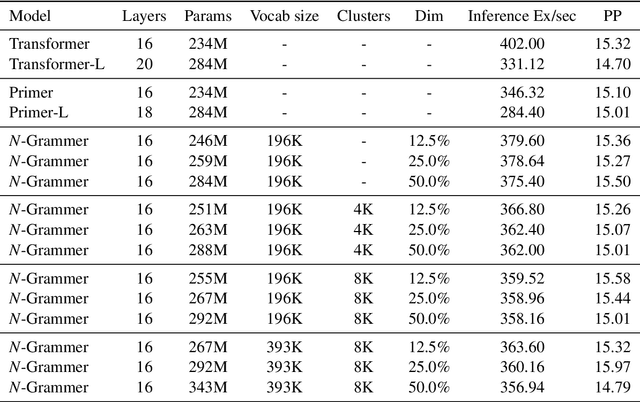
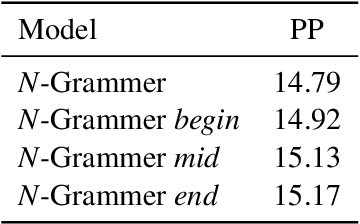
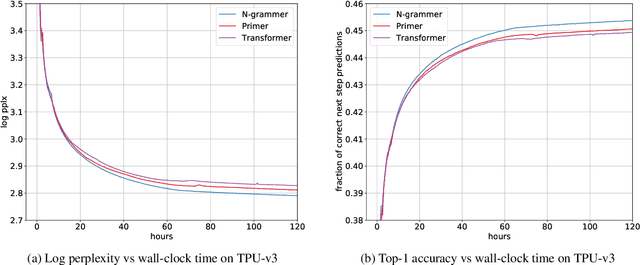
Transformer models have recently emerged as one of the foundational models in natural language processing, and as a byproduct, there is significant recent interest and investment in scaling these models. However, the training and inference costs of these large Transformer language models are prohibitive, thus necessitating more research in identifying more efficient variants. In this work, we propose a simple yet effective modification to the Transformer architecture inspired by the literature in statistical language modeling, by augmenting the model with n-grams that are constructed from a discrete latent representation of the text sequence. We evaluate our model, the N-Grammer on language modeling on the C4 data-set as well as text classification on the SuperGLUE data-set, and find that it outperforms several strong baselines such as the Transformer and the Primer. We open-source our model for reproducibility purposes in Jax.
Show, Don't Tell: Demonstrations Outperform Descriptions for Schema-Guided Task-Oriented Dialogue
Apr 08, 2022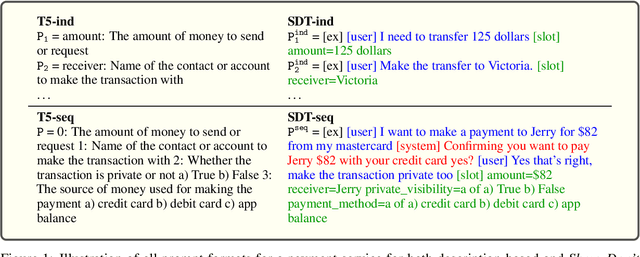
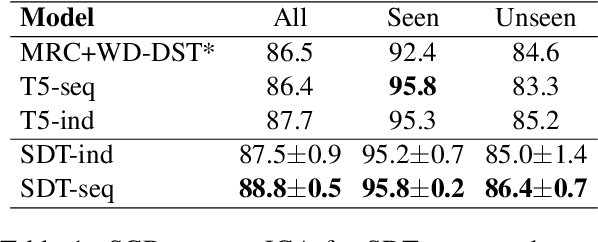
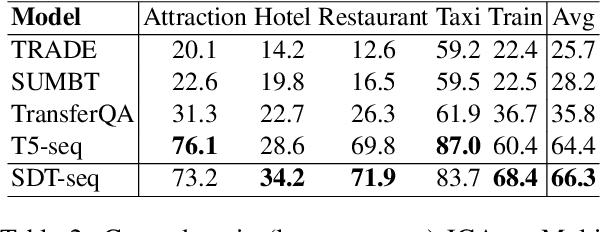
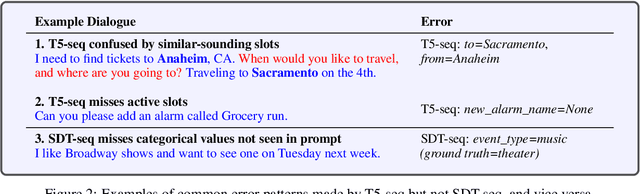
Building universal dialogue systems that can seamlessly operate across multiple domains/APIs and generalize to new ones with minimal supervision and maintenance is a critical challenge. Recent works have leveraged natural language descriptions for schema elements to enable such systems; however, descriptions can only indirectly convey schema semantics. In this work, we propose Show, Don't Tell, a prompt format for seq2seq modeling which uses a short labeled example dialogue to show the semantics of schema elements rather than tell the model via descriptions. While requiring similar effort from service developers, we show that using short examples as schema representations with large language models results in stronger performance and better generalization on two popular dialogue state tracking benchmarks: the Schema-Guided Dialogue dataset and the MultiWoZ leave-one-out benchmark.
Description-Driven Task-Oriented Dialog Modeling
Jan 21, 2022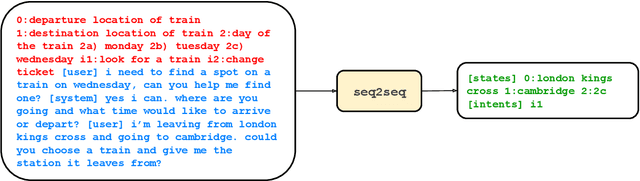
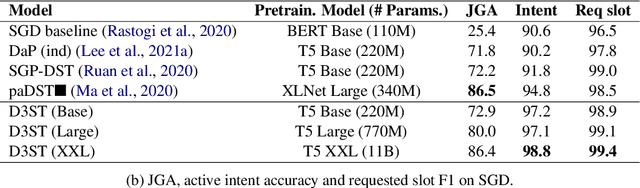
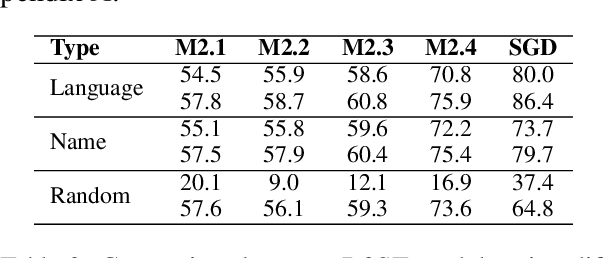
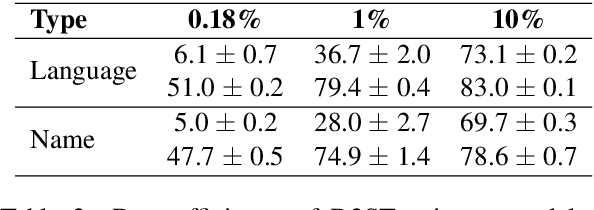
Task-oriented dialogue (TOD) systems are required to identify key information from conversations for the completion of given tasks. Such information is conventionally specified in terms of intents and slots contained in task-specific ontology or schemata. Since these schemata are designed by system developers, the naming convention for slots and intents is not uniform across tasks, and may not convey their semantics effectively. This can lead to models memorizing arbitrary patterns in data, resulting in suboptimal performance and generalization. In this paper, we propose that schemata should be modified by replacing names or notations entirely with natural language descriptions. We show that a language description-driven system exhibits better understanding of task specifications, higher performance on state tracking, improved data efficiency, and effective zero-shot transfer to unseen tasks. Following this paradigm, we present a simple yet effective Description-Driven Dialog State Tracking (D3ST) model, which relies purely on schema descriptions and an "index-picking" mechanism. We demonstrate the superiority in quality, data efficiency and robustness of our approach as measured on the MultiWOZ (Budzianowski et al.,2018), SGD (Rastogi et al., 2020), and the recent SGD-X (Lee et al., 2021) benchmarks.