 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHeterogeneous Attributed Graph Learning via Neighborhood-Aware Star Kernels
Nov 14, 2025



Attributed graphs, typically characterized by irregular topologies and a mix of numerical and categorical attributes, are ubiquitous in diverse domains such as social networks, bioinformatics, and cheminformatics. While graph kernels provide a principled framework for measuring graph similarity, existing kernel methods often struggle to simultaneously capture heterogeneous attribute semantics and neighborhood information in attributed graphs. In this work, we propose the Neighborhood-Aware Star Kernel (NASK), a novel graph kernel designed for attributed graph learning. NASK leverages an exponential transformation of the Gower similarity coefficient to jointly model numerical and categorical features efficiently, and employs star substructures enhanced by Weisfeiler-Lehman iterations to integrate multi-scale neighborhood structural information. We theoretically prove that NASK is positive definite, ensuring compatibility with kernel-based learning frameworks such as SVMs. Extensive experiments are conducted on eleven attributed and four large-scale real-world graph benchmarks. The results demonstrate that NASK consistently achieves superior performance over sixteen state-of-the-art baselines, including nine graph kernels and seven Graph Neural Networks.
LiteCUA: Computer as MCP Server for Computer-Use Agent on AIOS
May 24, 2025We present AIOS 1.0, a novel platform designed to advance computer-use agent (CUA) capabilities through environmental contextualization. While existing approaches primarily focus on building more powerful agent frameworks or enhancing agent models, we identify a fundamental limitation: the semantic disconnect between how language models understand the world and how computer interfaces are structured. AIOS 1.0 addresses this challenge by transforming computers into contextual environments that language models can natively comprehend, implementing a Model Context Protocol (MCP) server architecture to abstract computer states and actions. This approach effectively decouples interface complexity from decision complexity, enabling agents to reason more effectively about computing environments. To demonstrate our platform's effectiveness, we introduce LiteCUA, a lightweight computer-use agent built on AIOS 1.0 that achieves a 14.66% success rate on the OSWorld benchmark, outperforming several specialized agent frameworks despite its simple architecture. Our results suggest that contextualizing computer environments for language models represents a promising direction for developing more capable computer-use agents and advancing toward AI that can interact with digital systems. The source code of LiteCUA is available at https://github.com/agiresearch/LiteCUA, and it is also integrated into the AIOS main branch as part of AIOS at https://github.com/agiresearch/AIOS.
Learn to Think: Bootstrapping LLM Reasoning Capability Through Graph Representation Learning
May 17, 2025Large Language Models (LLMs) have achieved remarkable success across various domains. However, they still face significant challenges, including high computational costs for training and limitations in solving complex reasoning problems. Although existing methods have extended the reasoning capabilities of LLMs through structured paradigms, these approaches often rely on task-specific prompts and predefined reasoning processes, which constrain their flexibility and generalizability. To address these limitations, we propose a novel framework that leverages graph learning to enable more flexible and adaptive reasoning capabilities for LLMs. Specifically, this approach models the reasoning process of a problem as a graph and employs LLM-based graph learning to guide the adaptive generation of each reasoning step. To further enhance the adaptability of the model, we introduce a Graph Neural Network (GNN) module to perform representation learning on the generated reasoning process, enabling real-time adjustments to both the model and the prompt. Experimental results demonstrate that this method significantly improves reasoning performance across multiple tasks without requiring additional training or task-specific prompt design. Code can be found in https://github.com/zch65458525/L2T.
Large Language Model Enhancers for Graph Neural Networks: An Analysis from the Perspective of Causal Mechanism Identification
May 15, 2025The use of large language models (LLMs) as feature enhancers to optimize node representations, which are then used as inputs for graph neural networks (GNNs), has shown significant potential in graph representation learning. However, the fundamental properties of this approach remain underexplored. To address this issue, we propose conducting a more in-depth analysis of this issue based on the interchange intervention method. First, we construct a synthetic graph dataset with controllable causal relationships, enabling precise manipulation of semantic relationships and causal modeling to provide data for analysis. Using this dataset, we conduct interchange interventions to examine the deeper properties of LLM enhancers and GNNs, uncovering their underlying logic and internal mechanisms. Building on the analytical results, we design a plug-and-play optimization module to improve the information transfer between LLM enhancers and GNNs. Experiments across multiple datasets and models validate the proposed module.
LLM Enhancers for GNNs: An Analysis from the Perspective of Causal Mechanism Identification
May 13, 2025The use of large language models (LLMs) as feature enhancers to optimize node representations, which are then used as inputs for graph neural networks (GNNs), has shown significant potential in graph representation learning. However, the fundamental properties of this approach remain underexplored. To address this issue, we propose conducting a more in-depth analysis of this issue based on the interchange intervention method. First, we construct a synthetic graph dataset with controllable causal relationships, enabling precise manipulation of semantic relationships and causal modeling to provide data for analysis. Using this dataset, we conduct interchange interventions to examine the deeper properties of LLM enhancers and GNNs, uncovering their underlying logic and internal mechanisms. Building on the analytical results, we design a plug-and-play optimization module to improve the information transfer between LLM enhancers and GNNs. Experiments across multiple datasets and models validate the proposed module.
On the workflow, opportunities and challenges of developing foundation model in geophysics
Apr 24, 2025Foundation models, as a mainstream technology in artificial intelligence, have demonstrated immense potential across various domains in recent years, particularly in handling complex tasks and multimodal data. In the field of geophysics, although the application of foundation models is gradually expanding, there is currently a lack of comprehensive reviews discussing the full workflow of integrating foundation models with geophysical data. To address this gap, this paper presents a complete framework that systematically explores the entire process of developing foundation models in conjunction with geophysical data. From data collection and preprocessing to model architecture selection, pre-training strategies, and model deployment, we provide a detailed analysis of the key techniques and methodologies at each stage. In particular, considering the diversity, complexity, and physical consistency constraints of geophysical data, we discuss targeted solutions to address these challenges. Furthermore, we discuss how to leverage the transfer learning capabilities of foundation models to reduce reliance on labeled data, enhance computational efficiency, and incorporate physical constraints into model training, thereby improving physical consistency and interpretability. Through a comprehensive summary and analysis of the current technological landscape, this paper not only fills the gap in the geophysics domain regarding a full-process review of foundation models but also offers valuable practical guidance for their application in geophysical data analysis, driving innovation and advancement in the field.
Stable Virtual Camera: Generative View Synthesis with Diffusion Models
Mar 18, 2025We present Stable Virtual Camera (Seva), a generalist diffusion model that creates novel views of a scene, given any number of input views and target cameras. Existing works struggle to generate either large viewpoint changes or temporally smooth samples, while relying on specific task configurations. Our approach overcomes these limitations through simple model design, optimized training recipe, and flexible sampling strategy that generalize across view synthesis tasks at test time. As a result, our samples maintain high consistency without requiring additional 3D representation-based distillation, thus streamlining view synthesis in the wild. Furthermore, we show that our method can generate high-quality videos lasting up to half a minute with seamless loop closure. Extensive benchmarking demonstrates that Seva outperforms existing methods across different datasets and settings.
Building Machine Learning Challenges for Anomaly Detection in Science
Mar 03, 2025
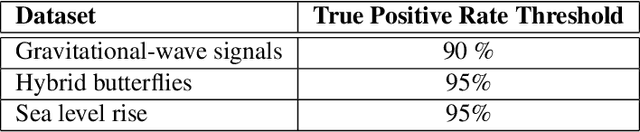


Scientific discoveries are often made by finding a pattern or object that was not predicted by the known rules of science. Oftentimes, these anomalous events or objects that do not conform to the norms are an indication that the rules of science governing the data are incomplete, and something new needs to be present to explain these unexpected outliers. The challenge of finding anomalies can be confounding since it requires codifying a complete knowledge of the known scientific behaviors and then projecting these known behaviors on the data to look for deviations. When utilizing machine learning, this presents a particular challenge since we require that the model not only understands scientific data perfectly but also recognizes when the data is inconsistent and out of the scope of its trained behavior. In this paper, we present three datasets aimed at developing machine learning-based anomaly detection for disparate scientific domains covering astrophysics, genomics, and polar science. We present the different datasets along with a scheme to make machine learning challenges around the three datasets findable, accessible, interoperable, and reusable (FAIR). Furthermore, we present an approach that generalizes to future machine learning challenges, enabling the possibility of large, more compute-intensive challenges that can ultimately lead to scientific discovery.
A-MEM: Agentic Memory for LLM Agents
Feb 17, 2025While large language model (LLM) agents can effectively use external tools for complex real-world tasks, they require memory systems to leverage historical experiences. Current memory systems enable basic storage and retrieval but lack sophisticated memory organization, despite recent attempts to incorporate graph databases. Moreover, these systems' fixed operations and structures limit their adaptability across diverse tasks. To address this limitation, this paper proposes a novel agentic memory system for LLM agents that can dynamically organize memories in an agentic way. Following the basic principles of the Zettelkasten method, we designed our memory system to create interconnected knowledge networks through dynamic indexing and linking. When a new memory is added, we generate a comprehensive note containing multiple structured attributes, including contextual descriptions, keywords, and tags. The system then analyzes historical memories to identify relevant connections, establishing links where meaningful similarities exist. Additionally, this process enables memory evolution - as new memories are integrated, they can trigger updates to the contextual representations and attributes of existing historical memories, allowing the memory network to continuously refine its understanding. Our approach combines the structured organization principles of Zettelkasten with the flexibility of agent-driven decision making, allowing for more adaptive and context-aware memory management. Empirical experiments on six foundation models show superior improvement against existing SOTA baselines. The source code is available at https://github.com/WujiangXu/AgenticMemory.
Bootstrapping Heterogeneous Graph Representation Learning via Large Language Models: A Generalized Approach
Dec 11, 2024



Graph representation learning methods are highly effective in handling complex non-Euclidean data by capturing intricate relationships and features within graph structures. However, traditional methods face challenges when dealing with heterogeneous graphs that contain various types of nodes and edges due to the diverse sources and complex nature of the data. Existing Heterogeneous Graph Neural Networks (HGNNs) have shown promising results but require prior knowledge of node and edge types and unified node feature formats, which limits their applicability. Recent advancements in graph representation learning using Large Language Models (LLMs) offer new solutions by integrating LLMs' data processing capabilities, enabling the alignment of various graph representations. Nevertheless, these methods often overlook heterogeneous graph data and require extensive preprocessing. To address these limitations, we propose a novel method that leverages the strengths of both LLM and GNN, allowing for the processing of graph data with any format and type of nodes and edges without the need for type information or special preprocessing. Our method employs LLM to automatically summarize and classify different data formats and types, aligns node features, and uses a specialized GNN for targeted learning, thus obtaining effective graph representations for downstream tasks. Theoretical analysis and experimental validation have demonstrated the effectiveness of our method.