 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Fourth Challenge on Image Super-Resolution ($\times$4) at NTIRE 2026: Benchmark Results and Method Overview
Apr 16, 2026This paper presents the NTIRE 2026 image super-resolution ($\times$4) challenge, one of the associated competitions of the NTIRE 2026 Workshop at CVPR 2026. The challenge aims to reconstruct high-resolution (HR) images from low-resolution (LR) inputs generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective super-resolution solutions and analyze recent advances in the field. To reflect the evolving objectives of image super-resolution, the challenge includes two tracks: (1) a restoration track, which emphasizes pixel-wise fidelity and ranks submissions based on PSNR; and (2) a perceptual track, which focuses on visual realism and evaluates results using a perceptual score. A total of 194 participants registered for the challenge, with 31 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, main results, and methods of participating teams. The challenge provides a unified benchmark and offers insights into current progress and future directions in image super-resolution.
NTIRE 2026 Challenge on Short-form UGC Video Restoration in the Wild with Generative Models: Datasets, Methods and Results
Apr 12, 2026This paper presents an overview of the NTIRE 2026 Challenge on Short-form UGC Video Restoration in the Wild with Generative Models. This challenge utilizes a new short-form UGC (S-UGC) video restoration benchmark, termed KwaiVIR, which is contributed by USTC and Kuaishou Technology. It contains both synthetically distorted videos and real-world short-form UGC videos in the wild. For this edition, the released data include 200 synthetic training videos, 48 wild training videos, 11 validation videos, and 20 testing videos. The primary goal of this challenge is to establish a strong and practical benchmark for restoring short-form UGC videos under complex real-world degradations, especially in the emerging paradigm of generative-model-based S-UGC video restoration. This challenge has two tracks: (i) the primary track is a subjective track, where the evaluation is based on a user study; (ii) the second track is an objective track. These two tracks enable a comprehensive assessment of restoration quality. In total, 95 teams have registered for this competition. And 12 teams submitted valid final solutions and fact sheets for the testing phase. The submitted methods achieved strong performance on the KwaiVIR benchmark, demonstrating encouraging progress in short-form UGC video restoration in the wild.
GPR Full-Waveform Inversion through Adaptive Filtering of Model Parameters and Gradients Using CNN
Oct 11, 2024



GPR full-waveform inversion optimizes the subsurface property model iteratively to match the entire waveform information. However, the model gradients derived from wavefield continuation often contain errors, such as ghost values and excessively large values at transmitter and receiver points. Furthermore, models updated based on these gradients frequently exhibit unclear characterization of anomalous bodies or false anomalies, making it challenging to obtain accurate inversion results. To address these issues, we introduced a novel full-waveform inversion (FWI) framework that incorporates an embedded convolutional neural network (CNN) to adaptively filter model parameters and gradients. Specifically, we embedded the CNN module before the forward modeling process and ensured the entire FWI process remains differentiable. This design leverages the auto-grad tool of the deep learning library, allowing model values to pass through the CNN module during forward computation and model gradients to pass through the CNN module during backpropagation. Experiments have shown that filtering the model parameters during forward computation and the model gradients during backpropagation can ultimately yield high-quality inversion results.
MmWave Radar and Vision Fusion for Object Detection in Autonomous Driving: A Review
Aug 12, 2021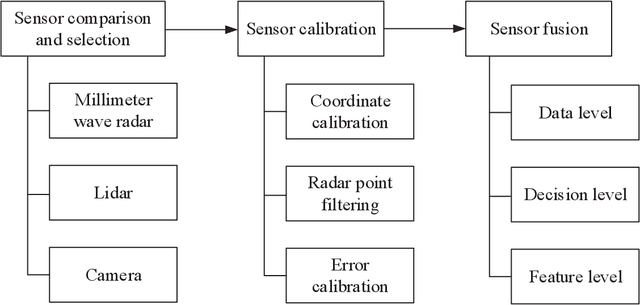
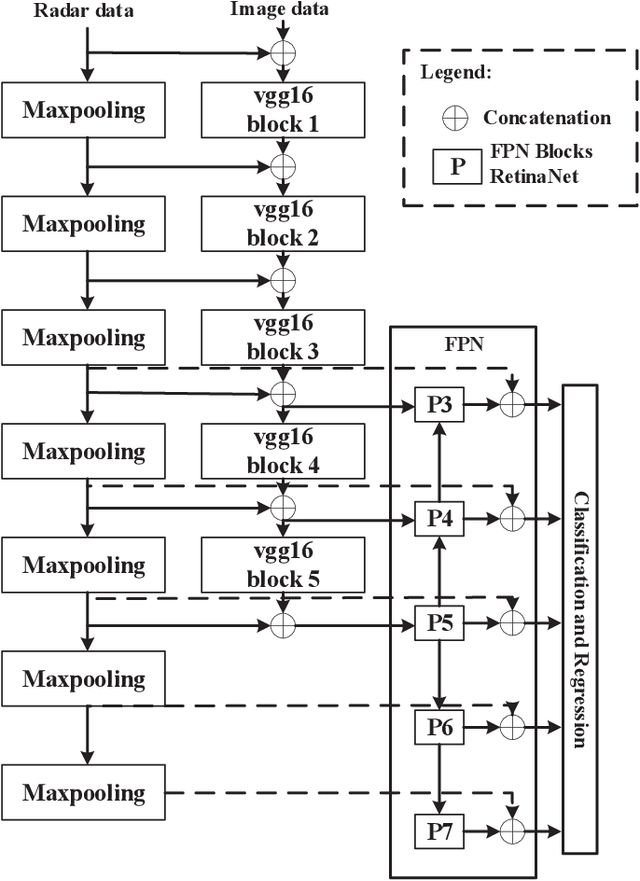
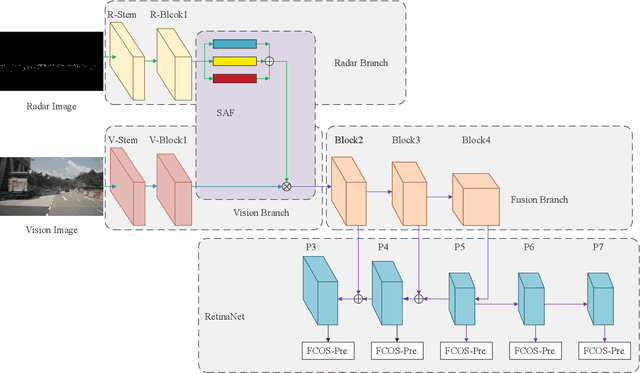
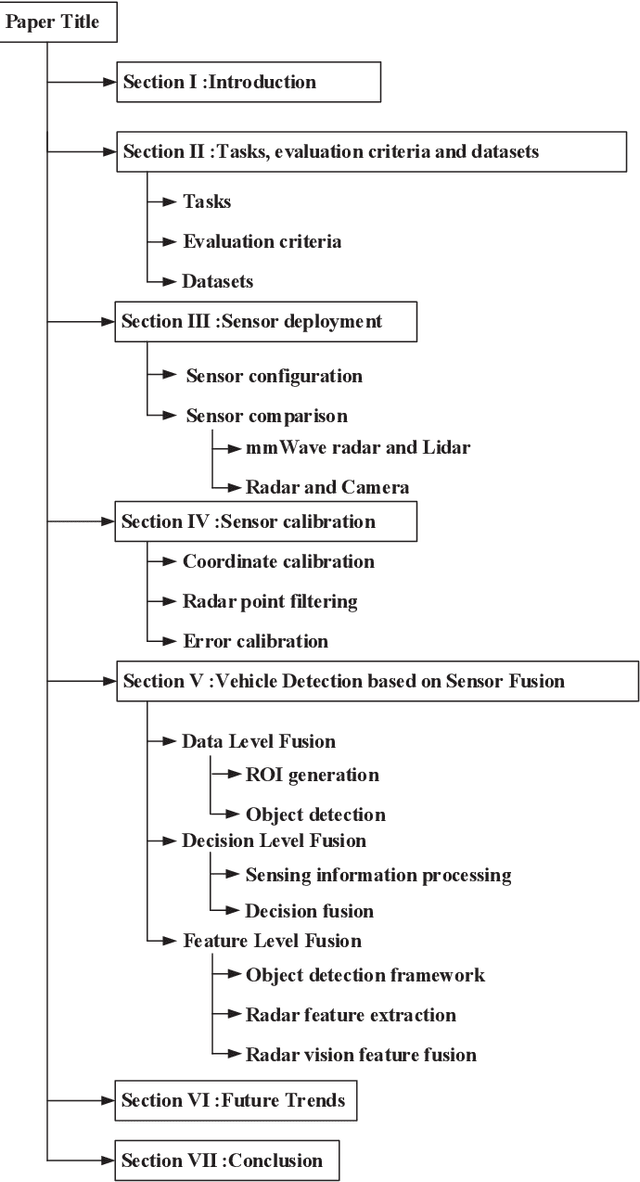
With autonomous driving developing in a booming stage, accurate object detection in complex scenarios attract wide attention to ensure the safety of autonomous driving. Millimeter wave (mmWave) radar and vision fusion is a mainstream solution for accurate obstacle detection. This article presents a detailed survey on mmWave radar and vision fusion based obstacle detection methods. Firstly, we introduce the tasks, evaluation criteria and datasets of object detection for autonomous driving. Then, the process of mmWave radar and vision fusion is divided into three parts: sensor deployment, sensor calibration and sensor fusion, which are reviewed comprehensively. Especially, we classify the fusion methods into data level, decision level and feature level fusion methods. Besides, we introduce the fusion of lidar and vision in autonomous driving in the aspects of obstacle detection, object classification and road segmentation, which is promising in the future. Finally, we summarize this article.