 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiConMP: A Nonlinear Model Predictive Control Framework for Whole Body Motion Planning
Jan 19, 2022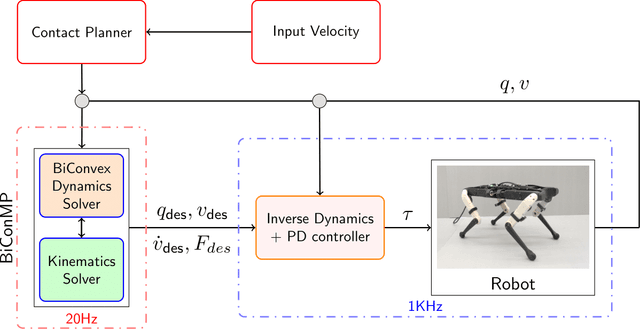
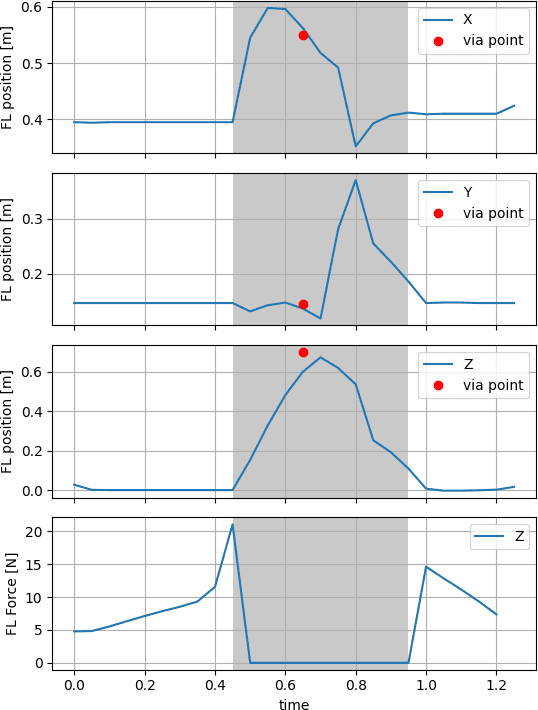
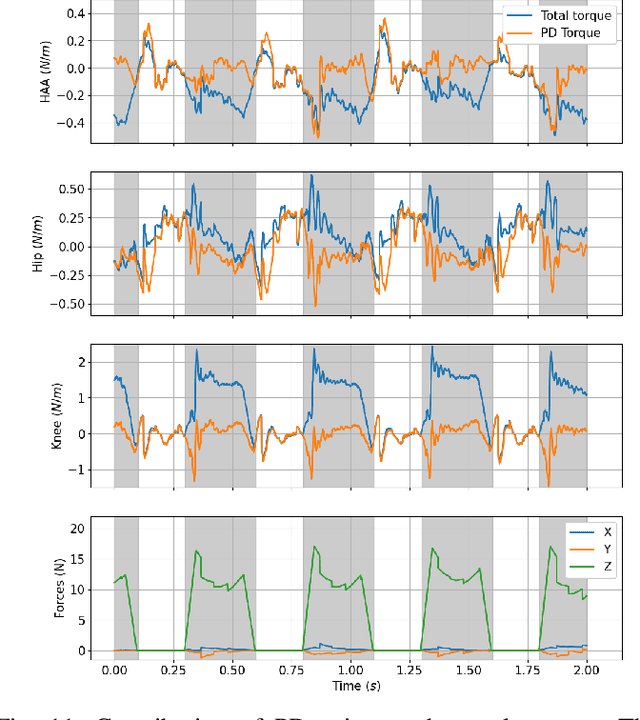
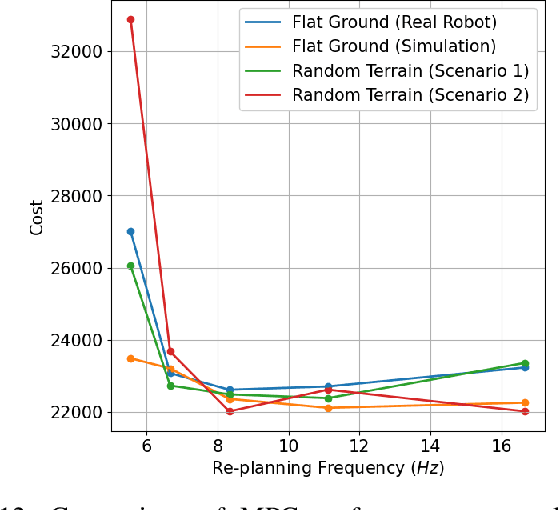
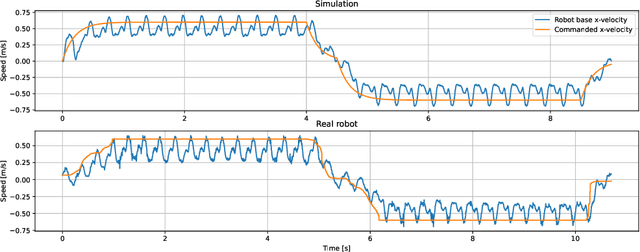
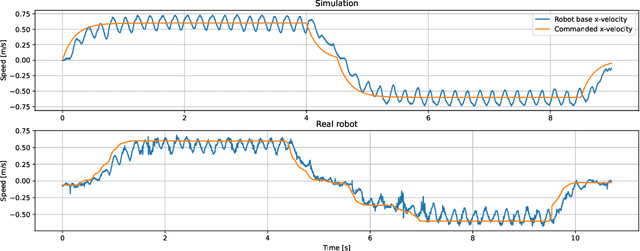
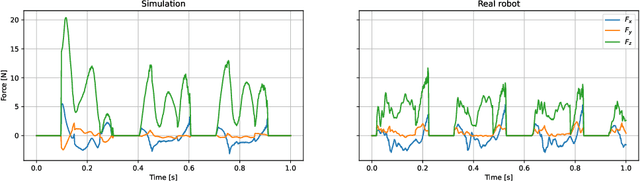
Online planning of whole-body motions for legged robots is challenging due to the inherent nonlinearity in the robot dynamics. In this work, we propose a nonlinear MPC framework, the BiConMP which can generate whole body trajectories online by efficiently exploiting the structure of the robot dynamics. BiConMP is used to generate various cyclic gaits on a real quadruped robot and its performance is evaluated on different terrain, countering unforeseen pushes and transitioning online between different gaits. Further, the ability of BiConMP to generate non-trivial acyclic whole-body dynamic motions on the robot is presented. Finally, an extensive empirical analysis on the effects of planning horizon and frequency on the nonlinear MPC framework is reported and discussed.
ValueNetQP: Learned one-step optimal control for legged locomotion
Jan 11, 2022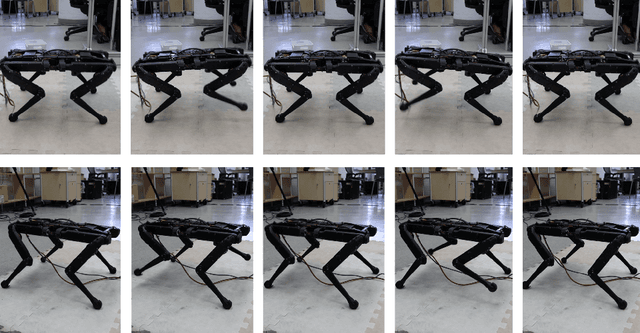
Optimal control is a successful approach to generate motions for complex robots, in particular for legged locomotion. However, these techniques are often too slow to run in real time for model predictive control or one needs to drastically simplify the dynamics model. In this work, we present a method to learn to predict the gradient and hessian of the problem value function, enabling fast resolution of the predictive control problem with a one-step quadratic program. In addition, our method is able to satisfy constraints like friction cones and unilateral constraints, which are important for high dynamics locomotion tasks. We demonstrate the capability of our method in simulation and on a real quadruped robot performing trotting and bounding motions.
Learning a Centroidal Motion Planner for Legged Locomotion
Nov 05, 2020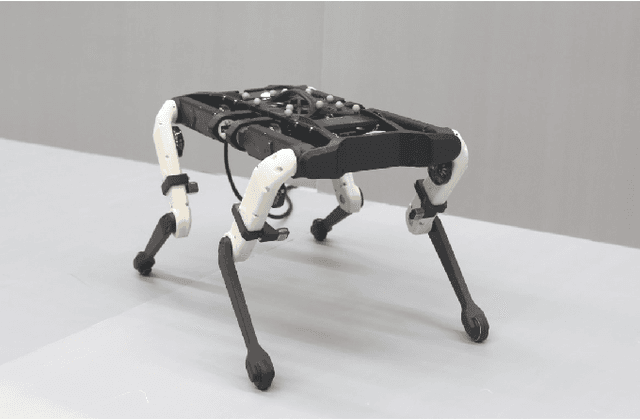
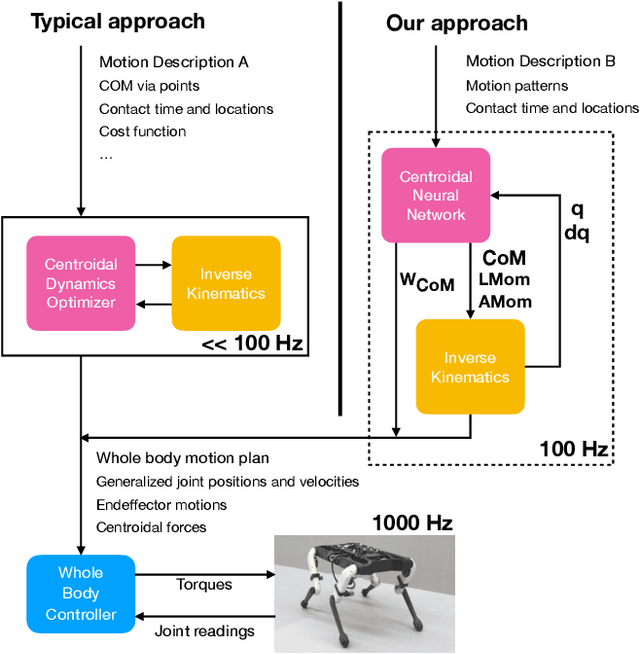

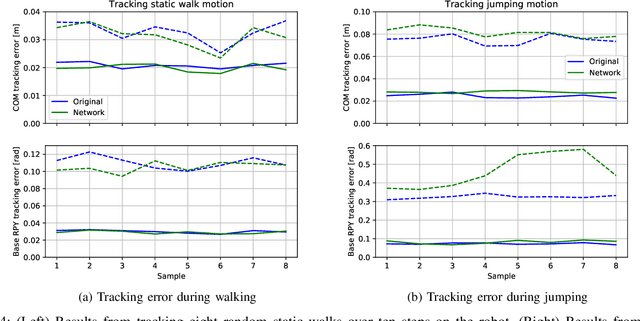
Whole-body optimizers have been successful at automatically computing complex dynamic locomotion behaviors. However they are often limited to offline planning as they are computationally too expensive to replan with a high frequency. Simpler models are then typically used for online replanning. In this paper we present a method to generate whole body movements in real-time for locomotion tasks. Our approach consists in learning a centroidal neural network that predicts the desired centroidal motion given the current state of the robot and a desired contact plan. The network is trained using an existing whole body motion optimizer. Our approach enables to learn with few training samples dynamic motions that can be used in a complete whole-body control framework at high frequency, which is usually not attainable with typical full-body optimizers. We demonstrate our method to generate a rich set of walking and jumping motions on a real quadruped robot.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020
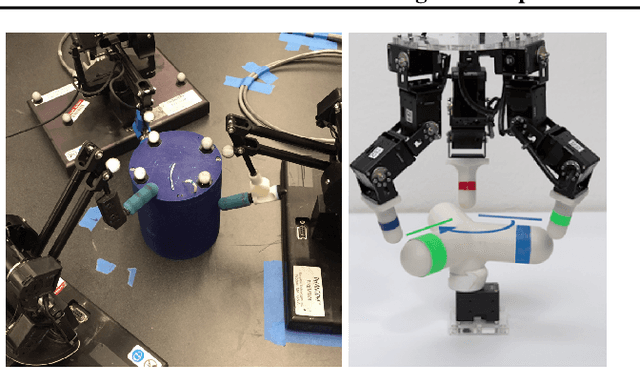
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.
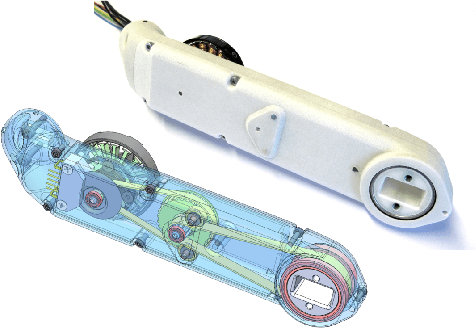
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Sep 30, 2019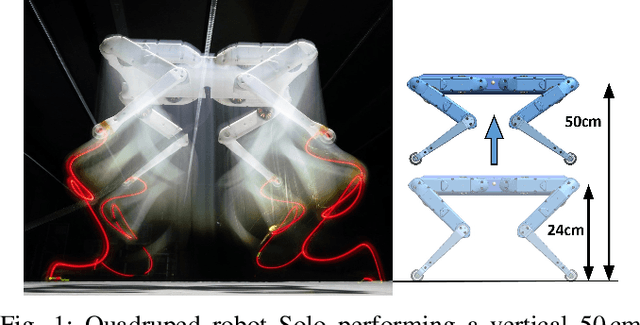
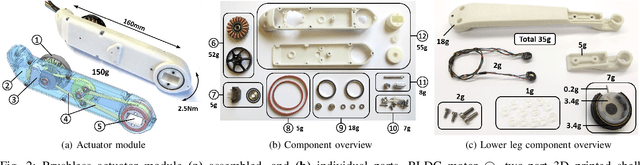
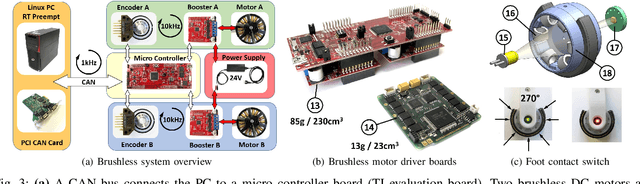
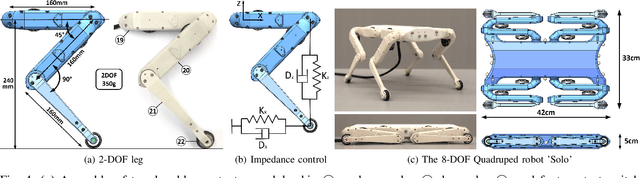
We present a new open-source torque-controlled legged robot system, with a low cost and low complexity actuator module at its core. It consists of a low-weight high torque brushless DC motor and a low gear ratio transmission suitable for impedance and force control. We also present a novel foot contact sensor suitable for legged locomotion with hard impacts. A 2.2 kg quadruped robot with a large range of motion is assembled from 8 identical actuator modules and 4 lower legs with foot contact sensors. To the best of our knowledge, it is the most lightest force-controlled quadruped robot. We leverage standard plastic 3D printing and off-the-shelf parts, resulting in light-weight and inexpensive robots, allowing for rapid distribution and duplication within the research community. In order to quantify the capabilities of our design, we systematically measure the achieved impedance at the foot in static and dynamic scenarios. We measured up to 10.8 dimensionless leg stiffness without active damping, which is comparable to the leg stiffness of a running human. Finally, in order to demonstrate the capabilities of our quadruped robot, we propose a novel controller which combines feedforward contact forces computed from a kino-dynamic optimizer with impedance control of the robot center of mass and base orientation. The controller is capable of regulating complex motions which are robust to environmental uncertainty.
Learning a Structured Neural Network Policy for a Hopping Task
Aug 06, 2018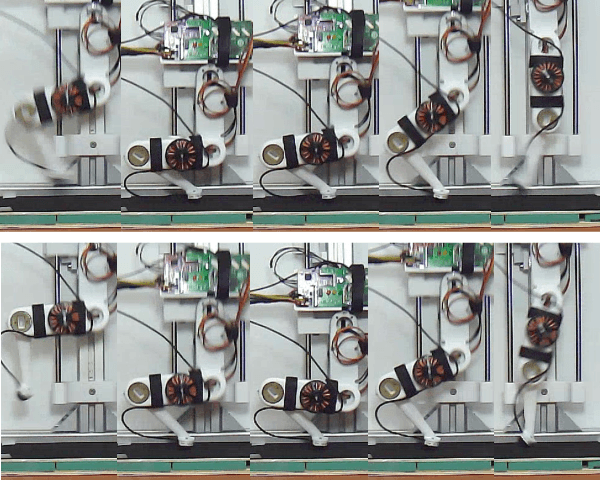
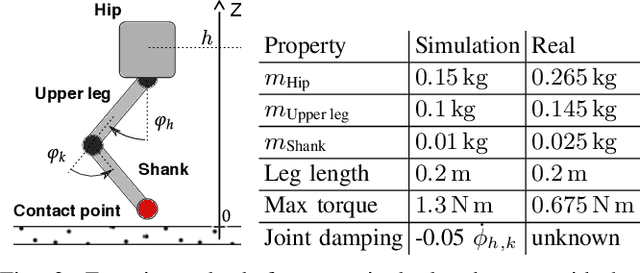
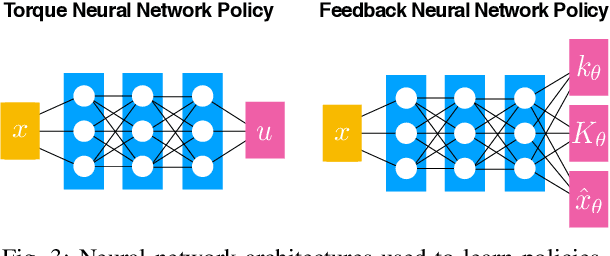
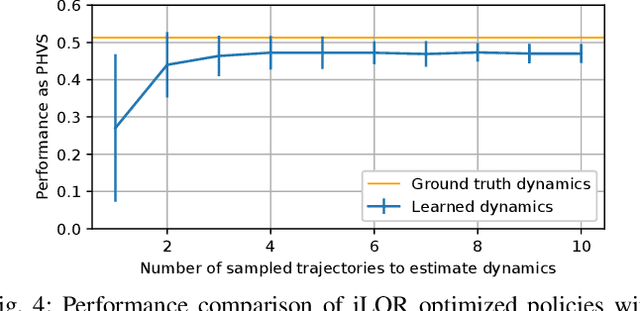
In this work we present a method for learning a reactive policy for a simple dynamic locomotion task involving hard impact and switching contacts where we assume the contact location and contact timing to be unknown. To learn such a policy, we use optimal control to optimize a local controller for a fixed environment and contacts. We learn the contact-rich dynamics for our underactuated systems along these trajectories in a sample efficient manner. We use the optimized policies to learn the reactive policy in form of a neural network. Using a new neural network architecture, we are able to preserve more information from the local policy and make its output interpretable in the sense that its output in terms of desired trajectories, feedforward commands and gains can be interpreted. Extensive simulations demonstrate the robustness of the approach to changing environments, outperforming a model-free gradient policy based methods on the same tasks in simulation. Finally, we show that the learned policy can be robustly transferred on a real robot.