 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast and Accurate Quantized Camera Scene Detection on Smartphones, Mobile AI 2021 Challenge: Report
May 17, 2021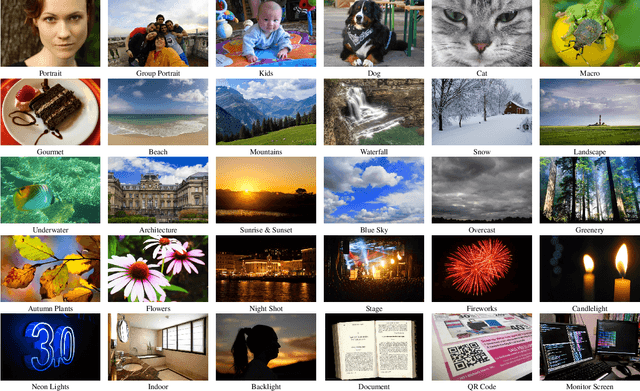
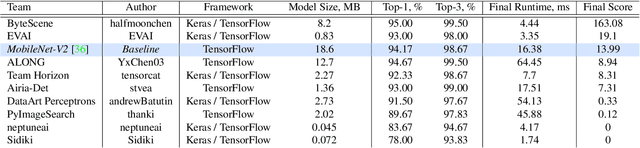

Camera scene detection is among the most popular computer vision problem on smartphones. While many custom solutions were developed for this task by phone vendors, none of the designed models were available publicly up until now. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop quantized deep learning-based camera scene classification solutions that can demonstrate a real-time performance on smartphones and IoT platforms. For this, the participants were provided with a large-scale CamSDD dataset consisting of more than 11K images belonging to the 30 most important scene categories. The runtime of all models was evaluated on the popular Apple Bionic A11 platform that can be found in many iOS devices. The proposed solutions are fully compatible with all major mobile AI accelerators and can demonstrate more than 100-200 FPS on the majority of recent smartphone platforms while achieving a top-3 accuracy of more than 98%. A detailed description of all models developed in the challenge is provided in this paper.
Fast and Accurate Single-Image Depth Estimation on Mobile Devices, Mobile AI 2021 Challenge: Report
May 17, 2021


Depth estimation is an important computer vision problem with many practical applications to mobile devices. While many solutions have been proposed for this task, they are usually very computationally expensive and thus are not applicable for on-device inference. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop an end-to-end deep learning-based depth estimation solutions that can demonstrate a nearly real-time performance on smartphones and IoT platforms. For this, the participants were provided with a new large-scale dataset containing RGB-depth image pairs obtained with a dedicated stereo ZED camera producing high-resolution depth maps for objects located at up to 50 meters. The runtime of all models was evaluated on the popular Raspberry Pi 4 platform with a mobile ARM-based Broadcom chipset. The proposed solutions can generate VGA resolution depth maps at up to 10 FPS on the Raspberry Pi 4 while achieving high fidelity results, and are compatible with any Android or Linux-based mobile devices. A detailed description of all models developed in the challenge is provided in this paper.