 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCAffNet: Hard Constraint-Affine Neural Networks
May 23, 2026We present a novel framework for embedding hard constraint satisfaction into neural network (NN) architectures, specifically feedforward neural networks and transformers, with input-dependent affine constraints of arbitrary cardinality. Traditional constraint enforcement approaches either rely on penalty-based soft constraints, which offer no guarantee of satisfaction, or on post-processing methods that enforce constraints after the NN is trained, which may lead to suboptimality. We introduce a trainable constraint-affine (CAffine) layer into NNs, yielding CAffNet, which goes beyond enforcing affine constraints via fixed orthogonal or parallel projections and enables joint optimization with network parameters. Moreover, we impose no restrictions on the constraint space dimensions and establish that our construction preserves the universal approximation properties of NNs, while providing provable guarantees on constraint adherence for all inputs. Experimental validation demonstrates robust performance across diverse domains requiring guaranteed constraint satisfaction.
PIPE Planner: Pathwise Information Gain with Map Predictions for Indoor Robot Exploration
Mar 10, 2025



Autonomous exploration in unknown environments requires estimating the information gain of an action to guide planning decisions. While prior approaches often compute information gain at discrete waypoints, pathwise integration offers a more comprehensive estimation but is often computationally challenging or infeasible and prone to overestimation. In this work, we propose the Pathwise Information Gain with Map Prediction for Exploration (PIPE) planner, which integrates cumulative sensor coverage along planned trajectories while leveraging map prediction to mitigate overestimation. To enable efficient pathwise coverage computation, we introduce a method to efficiently calculate the expected observation mask along the planned path, significantly reducing computational overhead. We validate PIPE on real-world floorplan datasets, demonstrating its superior performance over state-of-the-art baselines. Our results highlight the benefits of integrating predictive mapping with pathwise information gain for efficient and informed exploration.
Iterative Methods for Efficient Sampling-Based Optimal Motion Planning of Nonlinear Systems
Mar 14, 2016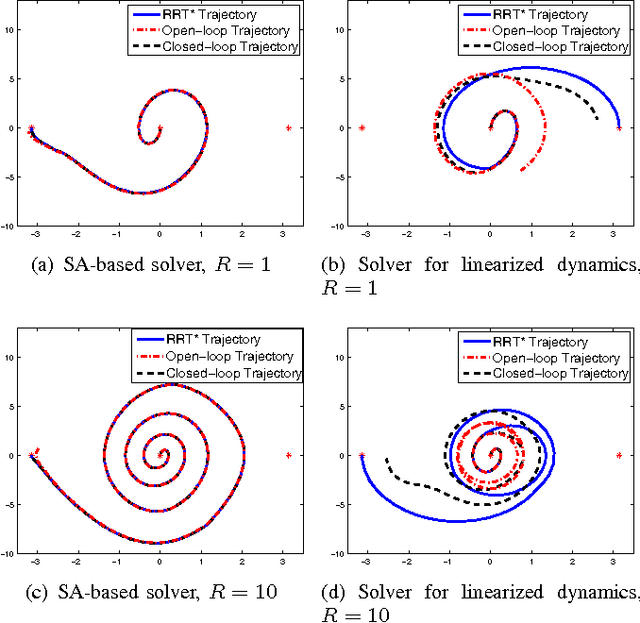
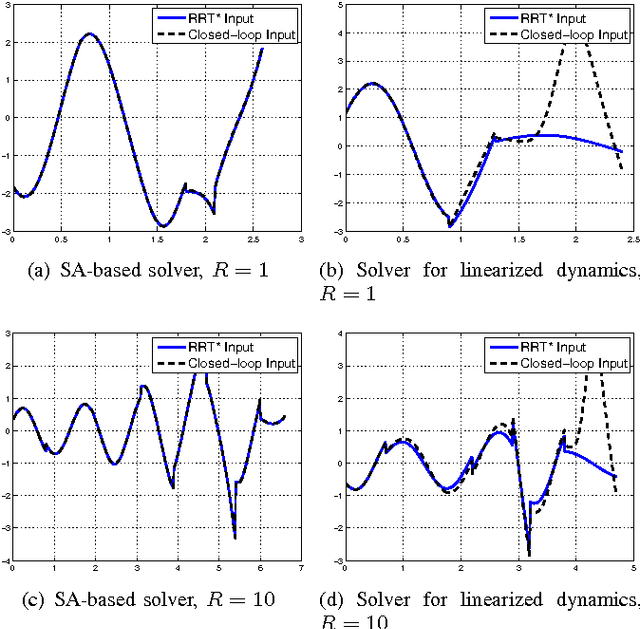
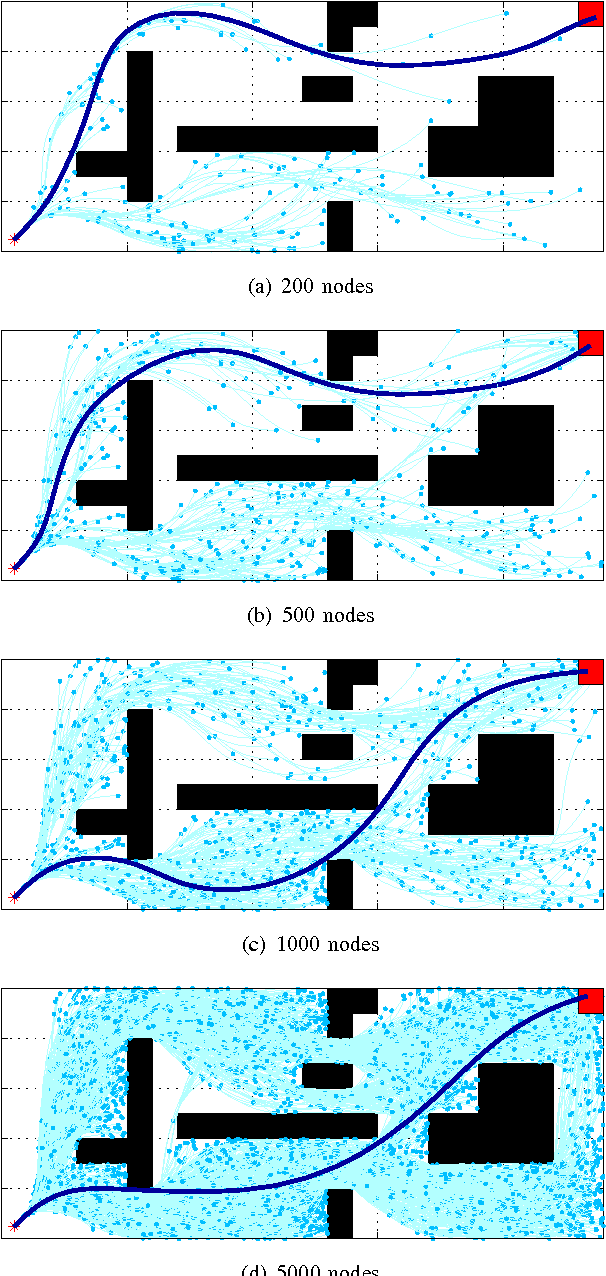
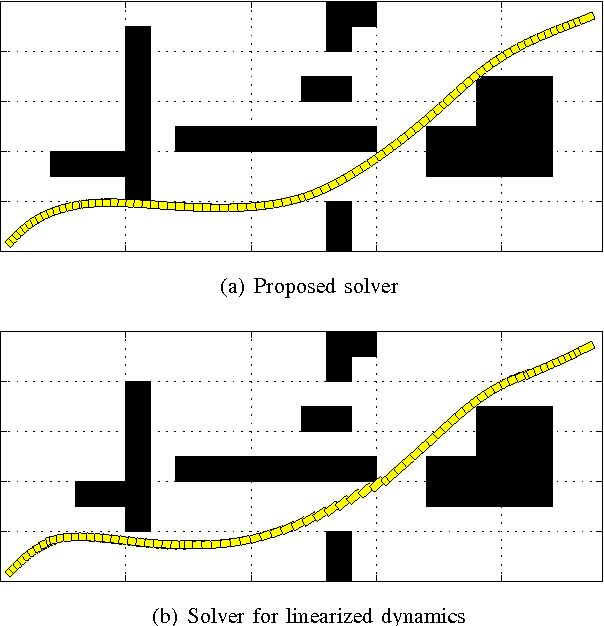
This paper extends the RRT* algorithm, a recently developed but widely-used sampling-based optimal motion planner, in order to effectively handle nonlinear kinodynamic constraints. Nonlinearity in kinodynamic differential constraints often leads to difficulties in choosing appropriate distance metric and in computing optimized trajectory segments in tree construction. To tackle these two difficulties, this work adopts the affine quadratic regulator-based pseudo metric as the distance measure and utilizes iterative two-point boundary value problem solvers for computing the optimized segments. The proposed extension then preserves the inherent asymptotic optimality of the RRT* framework, while efficiently handling a variety of kinodynamic constraints. Three numerical case studies validate the applicability of the proposed method.