 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenAI GPT-5 System Card
Dec 19, 2025This is the system card published alongside the OpenAI GPT-5 launch, August 2025. GPT-5 is a unified system with a smart and fast model that answers most questions, a deeper reasoning model for harder problems, and a real-time router that quickly decides which model to use based on conversation type, complexity, tool needs, and explicit intent (for example, if you say 'think hard about this' in the prompt). The router is continuously trained on real signals, including when users switch models, preference rates for responses, and measured correctness, improving over time. Once usage limits are reached, a mini version of each model handles remaining queries. This system card focuses primarily on gpt-5-thinking and gpt-5-main, while evaluations for other models are available in the appendix. The GPT-5 system not only outperforms previous models on benchmarks and answers questions more quickly, but -- more importantly -- is more useful for real-world queries. We've made significant advances in reducing hallucinations, improving instruction following, and minimizing sycophancy, and have leveled up GPT-5's performance in three of ChatGPT's most common uses: writing, coding, and health. All of the GPT-5 models additionally feature safe-completions, our latest approach to safety training to prevent disallowed content. Similarly to ChatGPT agent, we have decided to treat gpt-5-thinking as High capability in the Biological and Chemical domain under our Preparedness Framework, activating the associated safeguards. While we do not have definitive evidence that this model could meaningfully help a novice to create severe biological harm -- our defined threshold for High capability -- we have chosen to take a precautionary approach.
OpenAI o1 System Card
Dec 21, 2024



The o1 model series is trained with large-scale reinforcement learning to reason using chain of thought. These advanced reasoning capabilities provide new avenues for improving the safety and robustness of our models. In particular, our models can reason about our safety policies in context when responding to potentially unsafe prompts, through deliberative alignment. This leads to state-of-the-art performance on certain benchmarks for risks such as generating illicit advice, choosing stereotyped responses, and succumbing to known jailbreaks. Training models to incorporate a chain of thought before answering has the potential to unlock substantial benefits, while also increasing potential risks that stem from heightened intelligence. Our results underscore the need for building robust alignment methods, extensively stress-testing their efficacy, and maintaining meticulous risk management protocols. This report outlines the safety work carried out for the OpenAI o1 and OpenAI o1-mini models, including safety evaluations, external red teaming, and Preparedness Framework evaluations.
Learning on the Job: Self-Rewarding Offline-to-Online Finetuning for Industrial Insertion of Novel Connectors from Vision
Oct 27, 2022Learning-based methods in robotics hold the promise of generalization, but what can be done if a learned policy does not generalize to a new situation? In principle, if an agent can at least evaluate its own success (i.e., with a reward classifier that generalizes well even when the policy does not), it could actively practice the task and finetune the policy in this situation. We study this problem in the setting of industrial insertion tasks, such as inserting connectors in sockets and setting screws. Existing algorithms rely on precise localization of the connector or socket and carefully managed physical setups, such as assembly lines, to succeed at the task. But in unstructured environments such as homes or even some industrial settings, robots cannot rely on precise localization and may be tasked with previously unseen connectors. Offline reinforcement learning on a variety of connector insertion tasks is a potential solution, but what if the robot is tasked with inserting previously unseen connector? In such a scenario, we will still need methods that can robustly solve such tasks with online practice. One of the main observations we make in this work is that, with a suitable representation learning and domain generalization approach, it can be significantly easier for the reward function to generalize to a new but structurally similar task (e.g., inserting a new type of connector) than for the policy. This means that a learned reward function can be used to facilitate the finetuning of the robot's policy in situations where the policy fails to generalize in zero shot, but the reward function generalizes successfully. We show that such an approach can be instantiated in the real world, pretrained on 50 different connectors, and successfully finetuned to new connectors via the learned reward function. Videos can be viewed at https://sites.google.com/view/learningonthejob
Generalization with Lossy Affordances: Leveraging Broad Offline Data for Learning Visuomotor Tasks
Oct 12, 2022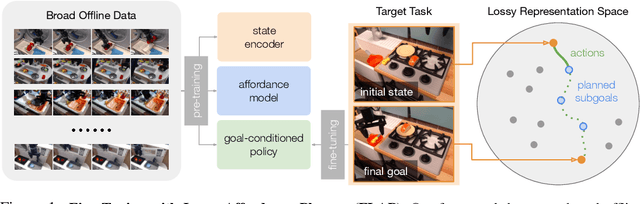
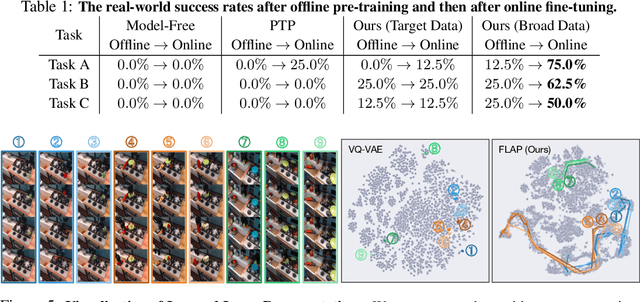
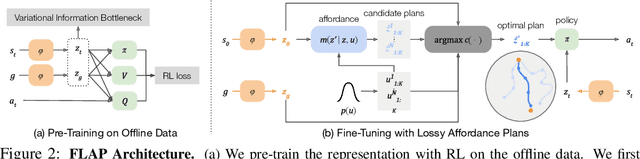
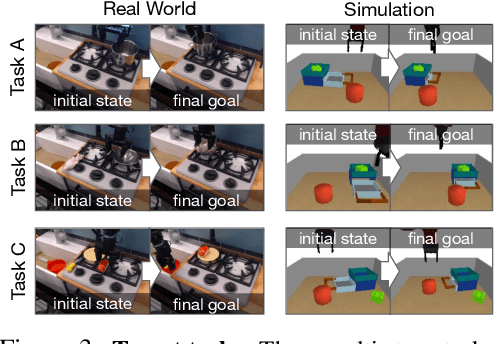
The utilization of broad datasets has proven to be crucial for generalization for a wide range of fields. However, how to effectively make use of diverse multi-task data for novel downstream tasks still remains a grand challenge in robotics. To tackle this challenge, we introduce a framework that acquires goal-conditioned policies for unseen temporally extended tasks via offline reinforcement learning on broad data, in combination with online fine-tuning guided by subgoals in learned lossy representation space. When faced with a novel task goal, the framework uses an affordance model to plan a sequence of lossy representations as subgoals that decomposes the original task into easier problems. Learned from the broad data, the lossy representation emphasizes task-relevant information about states and goals while abstracting away redundant contexts that hinder generalization. It thus enables subgoal planning for unseen tasks, provides a compact input to the policy, and facilitates reward shaping during fine-tuning. We show that our framework can be pre-trained on large-scale datasets of robot experiences from prior work and efficiently fine-tuned for novel tasks, entirely from visual inputs without any manual reward engineering.
Planning to Practice: Efficient Online Fine-Tuning by Composing Goals in Latent Space
May 17, 2022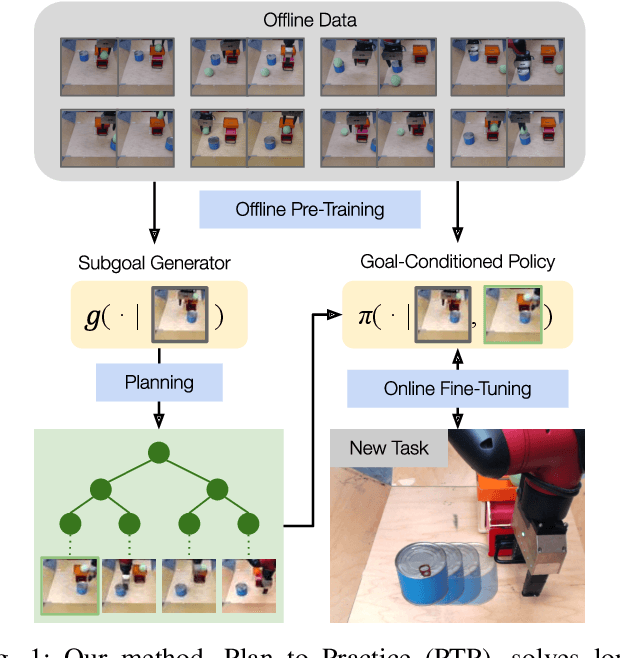
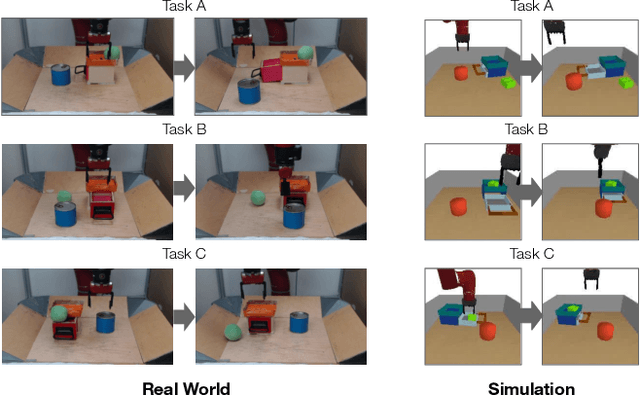
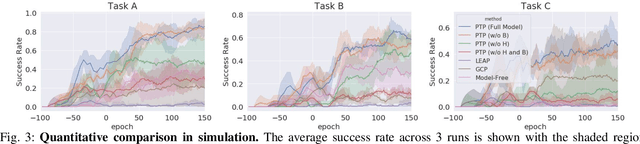
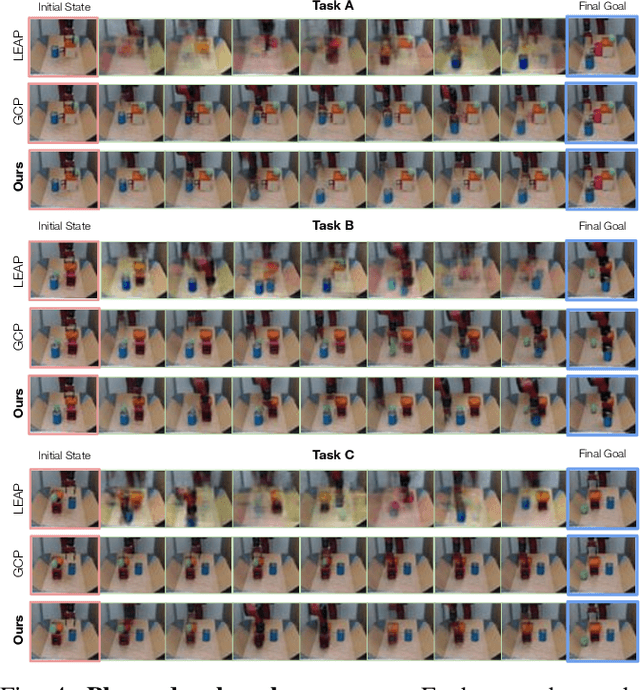
General-purpose robots require diverse repertoires of behaviors to complete challenging tasks in real-world unstructured environments. To address this issue, goal-conditioned reinforcement learning aims to acquire policies that can reach configurable goals for a wide range of tasks on command. However, such goal-conditioned policies are notoriously difficult and time-consuming to train from scratch. In this paper, we propose Planning to Practice (PTP), a method that makes it practical to train goal-conditioned policies for long-horizon tasks that require multiple distinct types of interactions to solve. Our approach is based on two key ideas. First, we decompose the goal-reaching problem hierarchically, with a high-level planner that sets intermediate subgoals using conditional subgoal generators in the latent space for a low-level model-free policy. Second, we propose a hybrid approach which first pre-trains both the conditional subgoal generator and the policy on previously collected data through offline reinforcement learning, and then fine-tunes the policy via online exploration. This fine-tuning process is itself facilitated by the planned subgoals, which breaks down the original target task into short-horizon goal-reaching tasks that are significantly easier to learn. We conduct experiments in both the simulation and real world, in which the policy is pre-trained on demonstrations of short primitive behaviors and fine-tuned for temporally extended tasks that are unseen in the offline data. Our experimental results show that PTP can generate feasible sequences of subgoals that enable the policy to efficiently solve the target tasks.
Bisimulation Makes Analogies in Goal-Conditioned Reinforcement Learning
Apr 28, 2022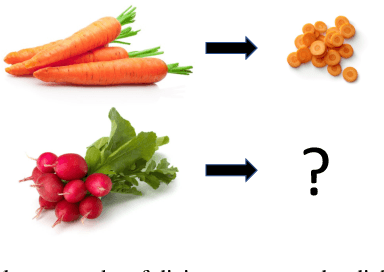
Building generalizable goal-conditioned agents from rich observations is a key to reinforcement learning (RL) solving real world problems. Traditionally in goal-conditioned RL, an agent is provided with the exact goal they intend to reach. However, it is often not realistic to know the configuration of the goal before performing a task. A more scalable framework would allow us to provide the agent with an example of an analogous task, and have the agent then infer what the goal should be for its current state. We propose a new form of state abstraction called goal-conditioned bisimulation that captures functional equivariance, allowing for the reuse of skills to achieve new goals. We learn this representation using a metric form of this abstraction, and show its ability to generalize to new goals in simulation manipulation tasks. Further, we prove that this learned representation is sufficient not only for goal conditioned tasks, but is amenable to any downstream task described by a state-only reward function. Videos can be found at https://sites.google.com/view/gc-bisimulation.
Offline Reinforcement Learning with Implicit Q-Learning
Oct 12, 2021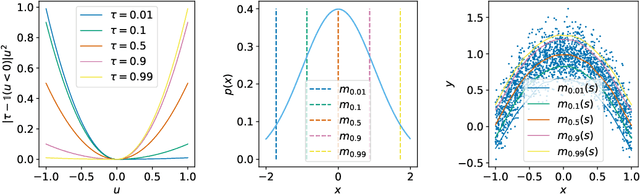
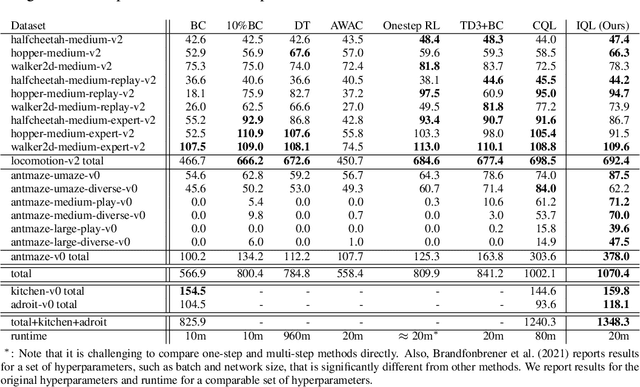
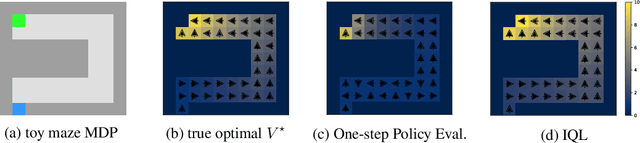
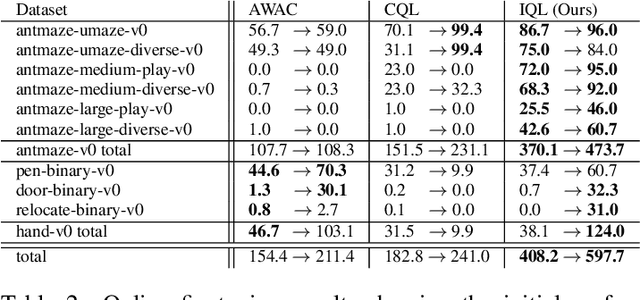
Offline reinforcement learning requires reconciling two conflicting aims: learning a policy that improves over the behavior policy that collected the dataset, while at the same time minimizing the deviation from the behavior policy so as to avoid errors due to distributional shift. This trade-off is critical, because most current offline reinforcement learning methods need to query the value of unseen actions during training to improve the policy, and therefore need to either constrain these actions to be in-distribution, or else regularize their values. We propose an offline RL method that never needs to evaluate actions outside of the dataset, but still enables the learned policy to improve substantially over the best behavior in the data through generalization. The main insight in our work is that, instead of evaluating unseen actions from the latest policy, we can approximate the policy improvement step implicitly by treating the state value function as a random variable, with randomness determined by the action (while still integrating over the dynamics to avoid excessive optimism), and then taking a state conditional upper expectile of this random variable to estimate the value of the best actions in that state. This leverages the generalization capacity of the function approximator to estimate the value of the best available action at a given state without ever directly querying a Q-function with this unseen action. Our algorithm alternates between fitting this upper expectile value function and backing it up into a Q-function. Then, we extract the policy via advantage-weighted behavioral cloning. We dub our method implicit Q-learning (IQL). IQL demonstrates the state-of-the-art performance on D4RL, a standard benchmark for offline reinforcement learning. We also demonstrate that IQL achieves strong performance fine-tuning using online interaction after offline initialization.
Offline Meta-Reinforcement Learning with Online Self-Supervision
Jul 19, 2021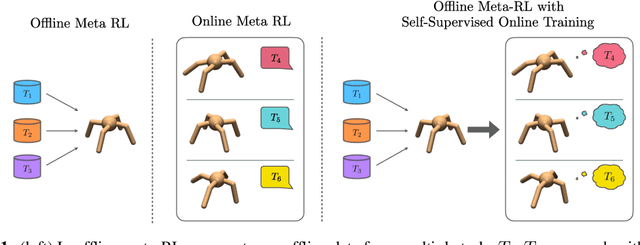
Meta-reinforcement learning (RL) can meta-train policies that adapt to new tasks with orders of magnitude less data than standard RL, but meta-training itself is costly and time-consuming. If we can meta-train on offline data, then we can reuse the same static dataset, labeled once with rewards for different tasks, to meta-train policies that adapt to a variety of new tasks at meta-test time. Although this capability would make meta-RL a practical tool for real-world use, offline meta-RL presents additional challenges beyond online meta-RL or standard offline RL settings. Meta-RL learns an exploration strategy that collects data for adapting, and also meta-trains a policy that quickly adapts to data from a new task. Since this policy was meta-trained on a fixed, offline dataset, it might behave unpredictably when adapting to data collected by the learned exploration strategy, which differs systematically from the offline data and thus induces distributional shift. We do not want to remove this distributional shift by simply adopting a conservative exploration strategy, because learning an exploration strategy enables an agent to collect better data for faster adaptation. Instead, we propose a hybrid offline meta-RL algorithm, which uses offline data with rewards to meta-train an adaptive policy, and then collects additional unsupervised online data, without any reward labels to bridge this distribution shift. By not requiring reward labels for online collection, this data can be much cheaper to collect. We compare our method to prior work on offline meta-RL on simulated robot locomotion and manipulation tasks and find that using additional unsupervised online data collection leads to a dramatic improvement in the adaptive capabilities of the meta-trained policies, matching the performance of fully online meta-RL on a range of challenging domains that require generalization to new tasks.
What Can I Do Here? Learning New Skills by Imagining Visual Affordances
Jun 13, 2021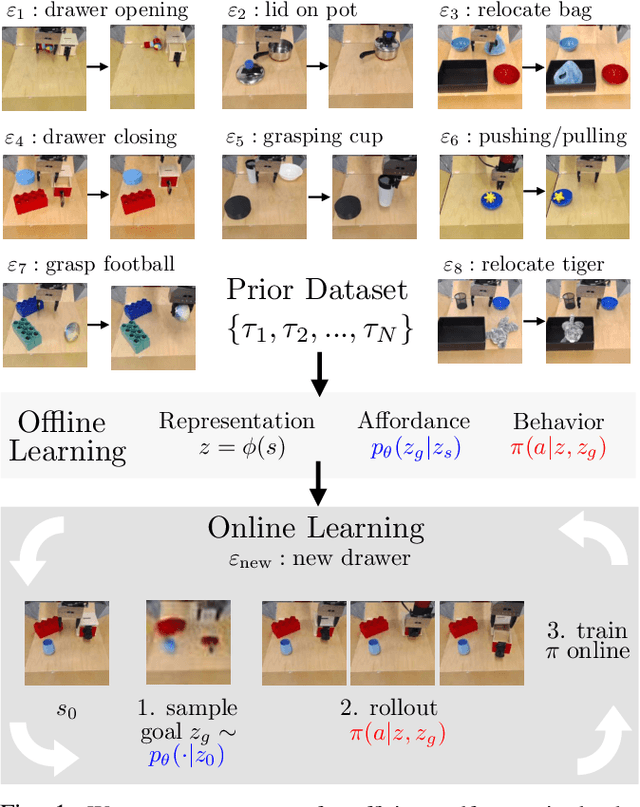
A generalist robot equipped with learned skills must be able to perform many tasks in many different environments. However, zero-shot generalization to new settings is not always possible. When the robot encounters a new environment or object, it may need to finetune some of its previously learned skills to accommodate this change. But crucially, previously learned behaviors and models should still be suitable to accelerate this relearning. In this paper, we aim to study how generative models of possible outcomes can allow a robot to learn visual representations of affordances, so that the robot can sample potentially possible outcomes in new situations, and then further train its policy to achieve those outcomes. In effect, prior data is used to learn what kinds of outcomes may be possible, such that when the robot encounters an unfamiliar setting, it can sample potential outcomes from its model, attempt to reach them, and thereby update both its skills and its outcome model. This approach, visuomotor affordance learning (VAL), can be used to train goal-conditioned policies that operate on raw image inputs, and can rapidly learn to manipulate new objects via our proposed affordance-directed exploration scheme. We show that VAL can utilize prior data to solve real-world tasks such drawer opening, grasping, and placing objects in new scenes with only five minutes of online experience in the new scene.
DisCo RL: Distribution-Conditioned Reinforcement Learning for General-Purpose Policies
Apr 23, 2021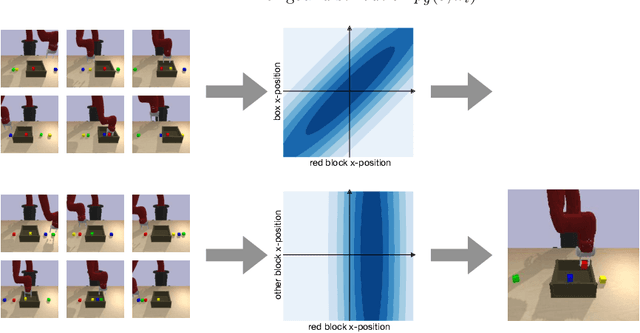
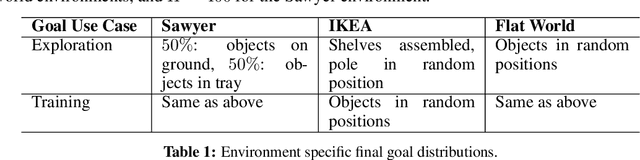
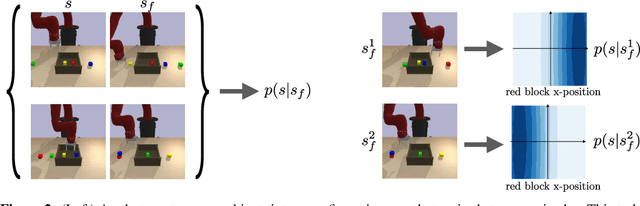
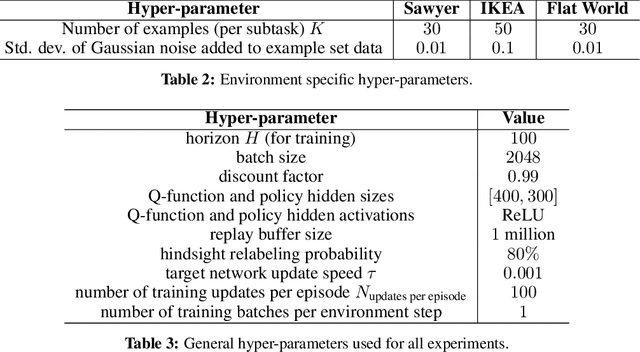
Can we use reinforcement learning to learn general-purpose policies that can perform a wide range of different tasks, resulting in flexible and reusable skills? Contextual policies provide this capability in principle, but the representation of the context determines the degree of generalization and expressivity. Categorical contexts preclude generalization to entirely new tasks. Goal-conditioned policies may enable some generalization, but cannot capture all tasks that might be desired. In this paper, we propose goal distributions as a general and broadly applicable task representation suitable for contextual policies. Goal distributions are general in the sense that they can represent any state-based reward function when equipped with an appropriate distribution class, while the particular choice of distribution class allows us to trade off expressivity and learnability. We develop an off-policy algorithm called distribution-conditioned reinforcement learning (DisCo RL) to efficiently learn these policies. We evaluate DisCo RL on a variety of robot manipulation tasks and find that it significantly outperforms prior methods on tasks that require generalization to new goal distributions.