 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeurosymbolic Programming for Science
Oct 10, 2022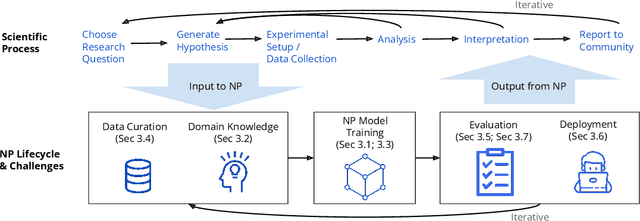
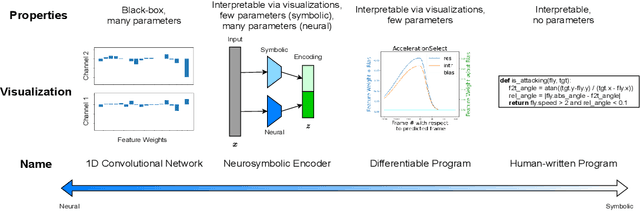
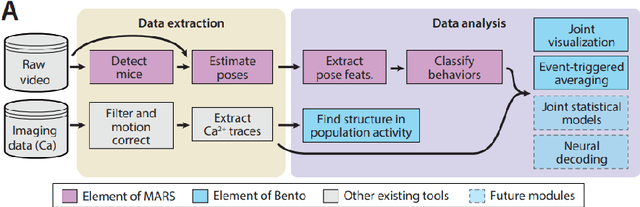
Neurosymbolic Programming (NP) techniques have the potential to accelerate scientific discovery across fields. These models combine neural and symbolic components to learn complex patterns and representations from data, using high-level concepts or known constraints. As a result, NP techniques can interface with symbolic domain knowledge from scientists, such as prior knowledge and experimental context, to produce interpretable outputs. Here, we identify opportunities and challenges between current NP models and scientific workflows, with real-world examples from behavior analysis in science. We define concrete next steps to move the NP for science field forward, to enable its use broadly for workflows across the natural and social sciences.
JoinABLe: Learning Bottom-up Assembly of Parametric CAD Joints
Nov 24, 2021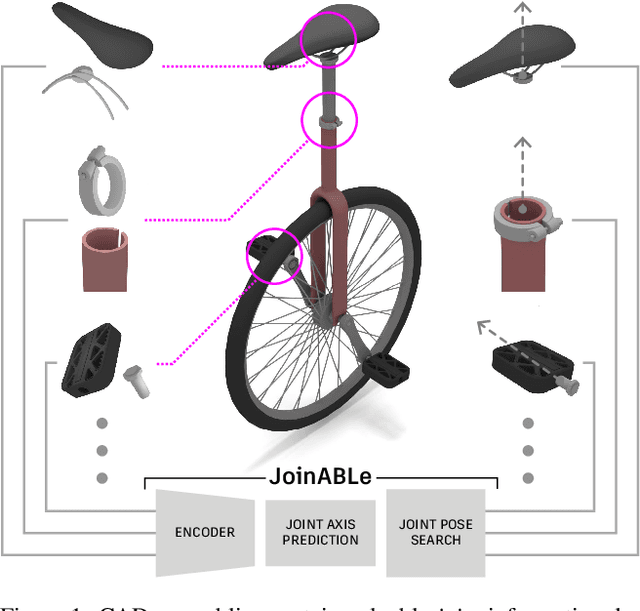
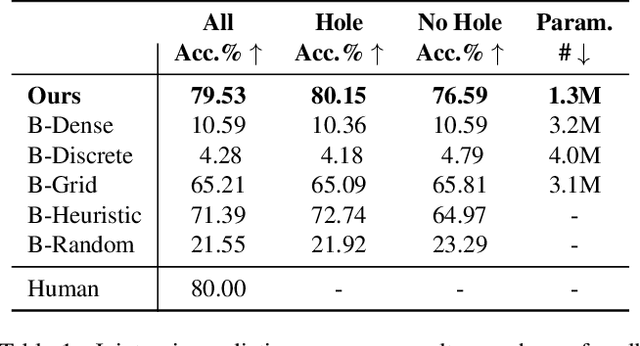
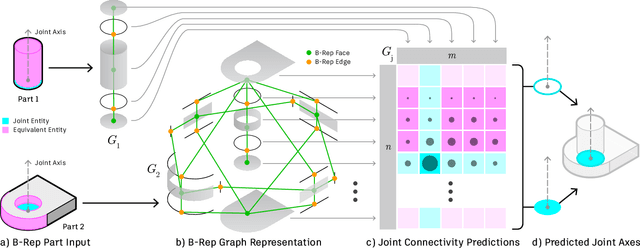
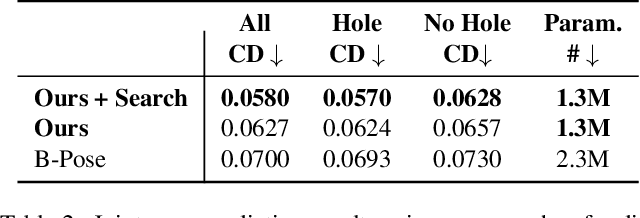
Physical products are often complex assemblies combining a multitude of 3D parts modeled in computer-aided design (CAD) software. CAD designers build up these assemblies by aligning individual parts to one another using constraints called joints. In this paper we introduce JoinABLe, a learning-based method that assembles parts together to form joints. JoinABLe uses the weak supervision available in standard parametric CAD files without the help of object class labels or human guidance. Our results show that by making network predictions over a graph representation of solid models we can outperform multiple baseline methods with an accuracy (79.53%) that approaches human performance (80%). Finally, to support future research we release the Fusion 360 Gallery assembly dataset, containing assemblies with rich information on joints, contact surfaces, holes, and the underlying assembly graph structure.
Safe Human-Interactive Control via Shielding
Oct 11, 2021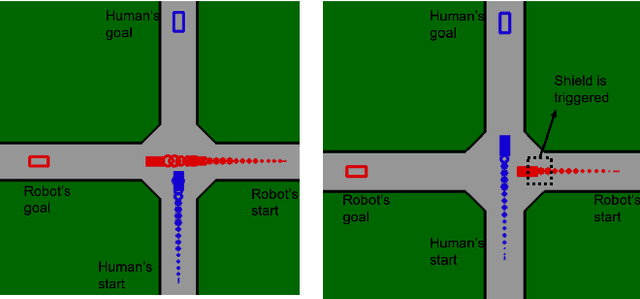
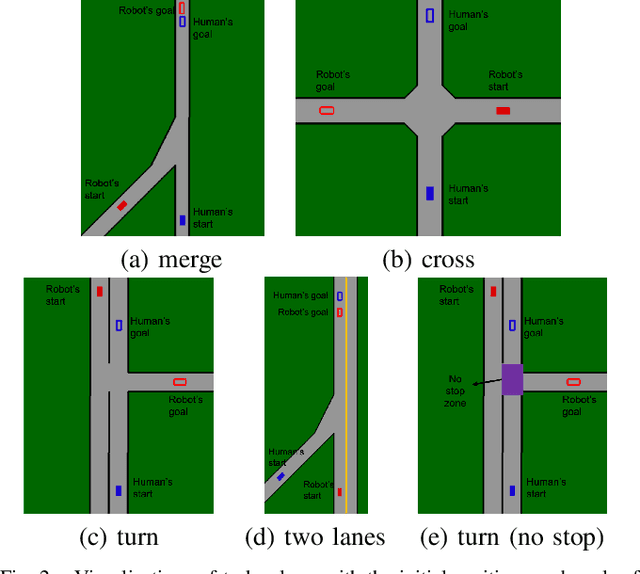
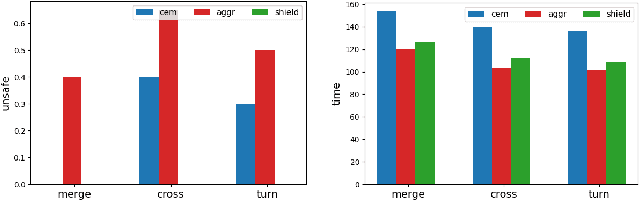
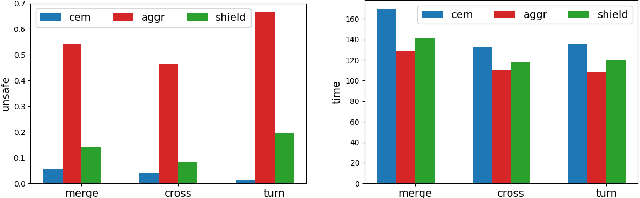
Ensuring safety for human-interactive robotics is important due to the potential for human injury. The key challenge is defining safety in a way that accounts for the complex range of human behaviors without modeling the human as an unconstrained adversary. We propose a novel approach to ensuring safety in these settings. Our approach focuses on defining backup actions that we believe human always considers taking to avoid an accident -- e.g., brake to avoid rear-ending the other agent. Given such a definition, we consider a safety constraint that guarantees safety as long as the human takes the appropriate backup actions when necessary to ensure safety. Then, we propose an algorithm that overrides an arbitrary given controller as needed to ensure that the robot is safe. We evaluate our approach in a simulated environment, interacting with both real and simulated humans.
Program Synthesis Guided Reinforcement Learning
Feb 22, 2021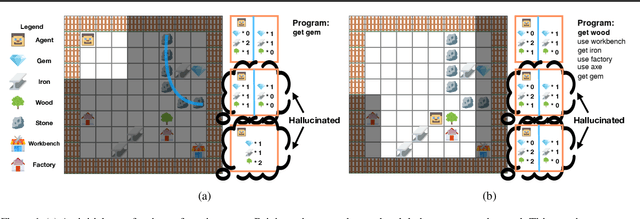


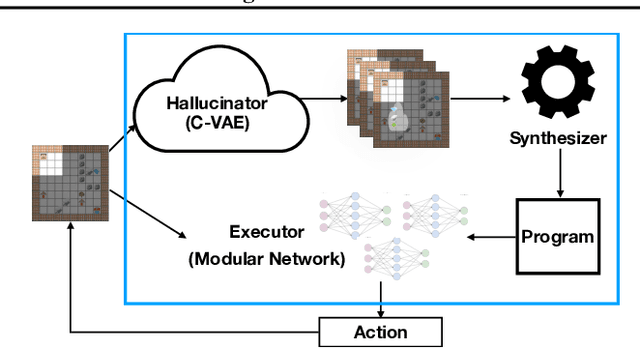
A key challenge for reinforcement learning is solving long-horizon planning and control problems. Recent work has proposed leveraging programs to help guide the learning algorithm in these settings. However, these approaches impose a high manual burden on the user since they must provide a guiding program for every new task they seek to achieve. We propose an approach that leverages program synthesis to automatically generate the guiding program. A key challenge is how to handle partially observable environments. We propose model predictive program synthesis, which trains a generative model to predict the unobserved portions of the world, and then synthesizes a program based on samples from this model in a way that is robust to its uncertainty. We evaluate our approach on a set of challenging benchmarks, including a 2D Minecraft-inspired ``craft'' environment where the agent must perform a complex sequence of subtasks to achieve its goal, a box-world environment that requires abstract reasoning, and a variant of the craft environment where the agent is a MuJoCo Ant. Our approach significantly outperforms several baselines, and performs essentially as well as an oracle that is given an effective program.
Neurosymbolic Transformers for Multi-Agent Communication
Jan 05, 2021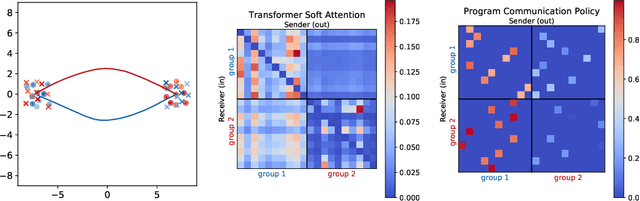
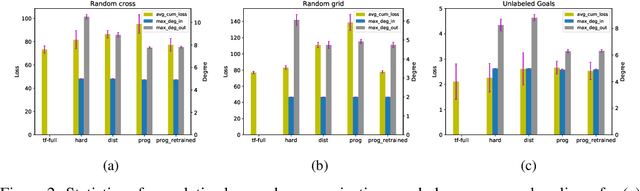
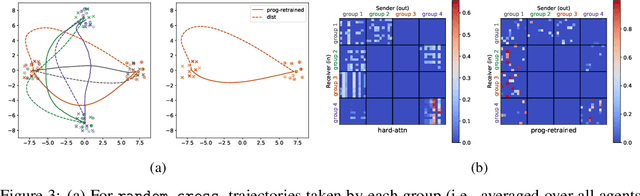
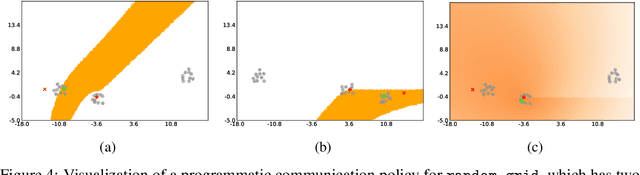
We study the problem of inferring communication structures that can solve cooperative multi-agent planning problems while minimizing the amount of communication. We quantify the amount of communication as the maximum degree of the communication graph; this metric captures settings where agents have limited bandwidth. Minimizing communication is challenging due to the combinatorial nature of both the decision space and the objective; for instance, we cannot solve this problem by training neural networks using gradient descent. We propose a novel algorithm that synthesizes a control policy that combines a programmatic communication policy used to generate the communication graph with a transformer policy network used to choose actions. Our algorithm first trains the transformer policy, which implicitly generates a "soft" communication graph; then, it synthesizes a programmatic communication policy that "hardens" this graph, forming a neurosymbolic transformer. Our experiments demonstrate how our approach can synthesize policies that generate low-degree communication graphs while maintaining near-optimal performance.
Representing Partial Programs with Blended Abstract Semantics
Dec 23, 2020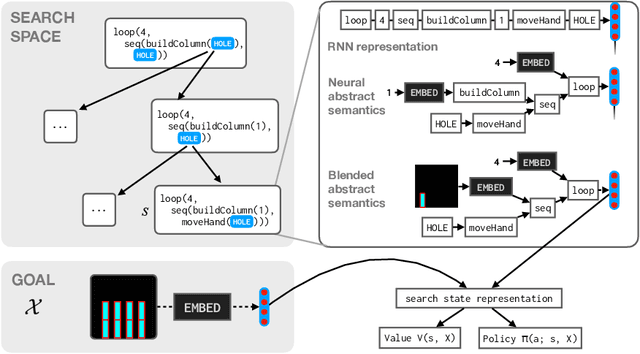
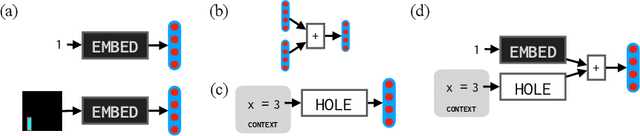
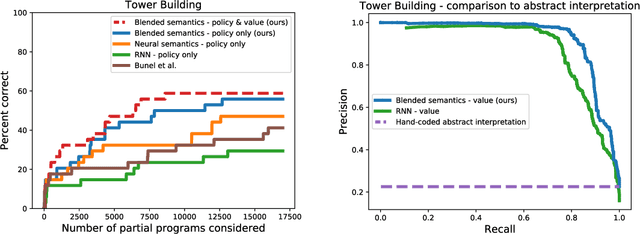

Synthesizing programs from examples requires searching over a vast, combinatorial space of possible programs. In this search process, a key challenge is representing the behavior of a partially written program before it can be executed, to judge if it is on the right track and predict where to search next. We introduce a general technique for representing partially written programs in a program synthesis engine. We take inspiration from the technique of abstract interpretation, in which an approximate execution model is used to determine if an unfinished program will eventually satisfy a goal specification. Here we learn an approximate execution model implemented as a modular neural network. By constructing compositional program representations that implicitly encode the interpretation semantics of the underlying programming language, we can represent partial programs using a flexible combination of concrete execution state and learned neural representations, using the learned approximate semantics when concrete semantics are not known (in unfinished parts of the program). We show that these hybrid neuro-symbolic representations enable execution-guided synthesizers to use more powerful language constructs, such as loops and higher-order functions, and can be used to synthesize programs more accurately for a given search budget than pure neural approaches in several domains.
Fusion 360 Gallery: A Dataset and Environment for Programmatic CAD Reconstruction
Oct 05, 2020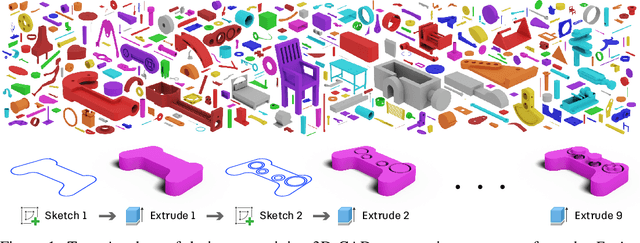
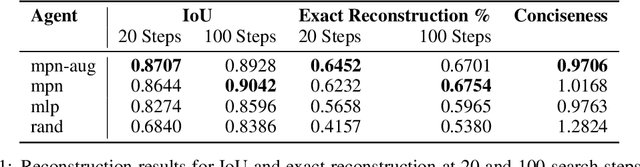
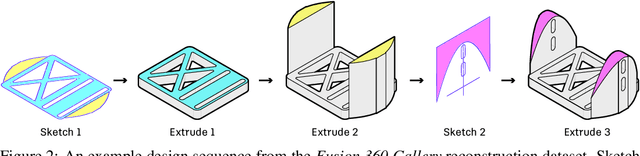
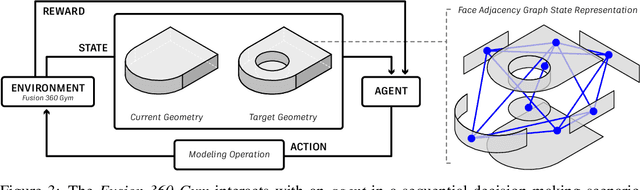
Parametric computer-aided design (CAD) is a standard paradigm used for the design of manufactured objects. CAD designers perform modeling operations, such as sketch and extrude, to form a construction sequence that makes up a final design. Despite the pervasiveness of parametric CAD and growing interest from the research community, a dataset of human designed 3D CAD construction sequences has not been available to-date. In this paper we present the Fusion 360 Gallery reconstruction dataset and environment for learning CAD reconstruction. We provide a dataset of 8,625 designs, comprising sequential sketch and extrude modeling operations, together with a complementary environment called the Fusion 360 Gym, to assist with performing CAD reconstruction. We outline a standard CAD reconstruction task, together with evaluation metrics, and present results from a novel method using neurally guided search to recover a construction sequence from raw geometry.
Program Synthesis with Pragmatic Communication
Jul 09, 2020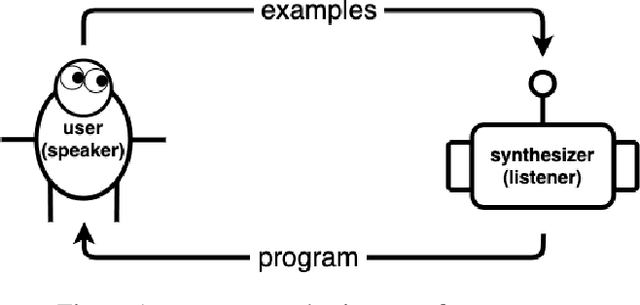
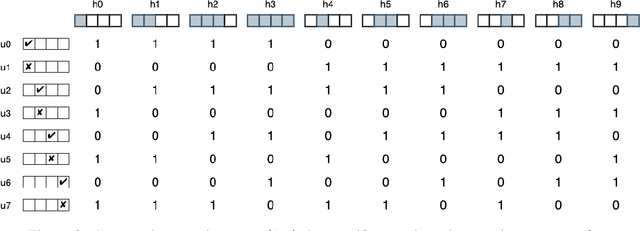
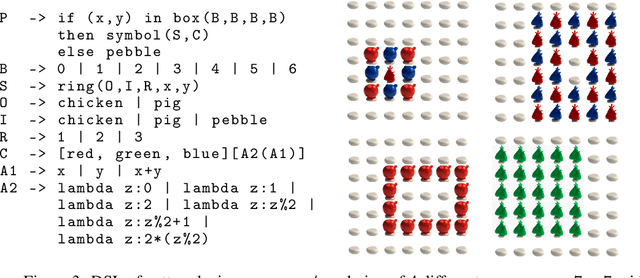
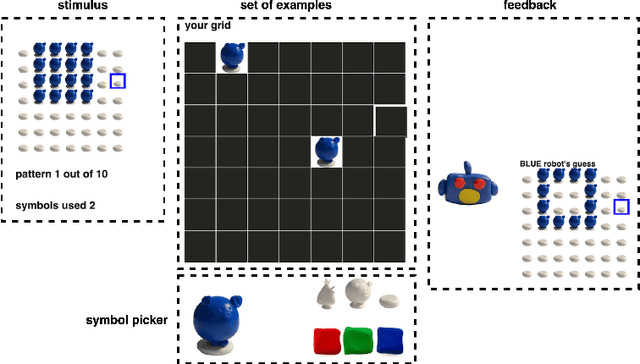
Program synthesis techniques construct or infer programs from user-provided specifications, such as input-output examples. Yet most specifications, especially those given by end-users, leave the synthesis problem radically ill-posed, because many programs may simultaneously satisfy the specification. Prior work resolves this ambiguity by using various inductive biases, such as a preference for simpler programs. This work introduces a new inductive bias derived by modeling the program synthesis task as rational communication, drawing insights from recursive reasoning models of pragmatics. Given a specification, we score a candidate program both on its consistency with the specification, and also whether a rational speaker would chose this particular specification to communicate that program. We develop efficient algorithms for such an approach when learning from input-output examples, and build a pragmatic program synthesizer over a simple grid-like layout domain. A user study finds that end-user participants communicate more effectively with the pragmatic program synthesizer over a non-pragmatic one.
Verifiably Safe Exploration for End-to-End Reinforcement Learning
Jul 02, 2020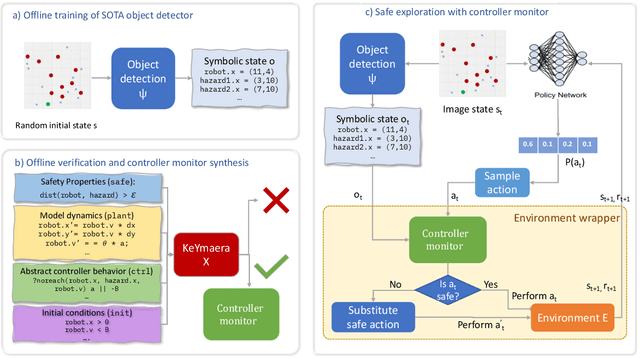
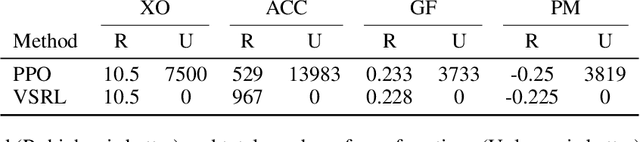
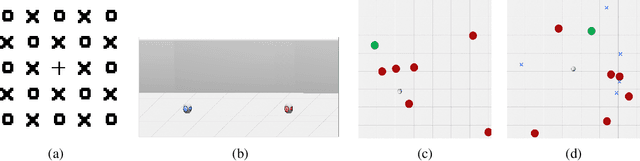
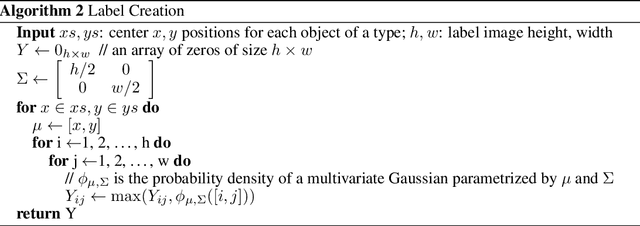
Deploying deep reinforcement learning in safety-critical settings requires developing algorithms that obey hard constraints during exploration. This paper contributes a first approach toward enforcing formal safety constraints on end-to-end policies with visual inputs. Our approach draws on recent advances in object detection and automated reasoning for hybrid dynamical systems. The approach is evaluated on a novel benchmark that emphasizes the challenge of safely exploring in the presence of hard constraints. Our benchmark draws from several proposed problem sets for safe learning and includes problems that emphasize challenges such as reward signals that are not aligned with safety constraints. On each of these benchmark problems, our algorithm completely avoids unsafe behavior while remaining competitive at optimizing for as much reward as is safe. We also prove that our method of enforcing the safety constraints preserves all safe policies from the original environment.
DreamCoder: Growing generalizable, interpretable knowledge with wake-sleep Bayesian program learning
Jun 15, 2020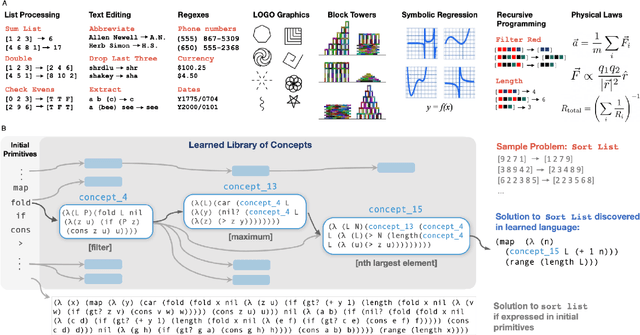
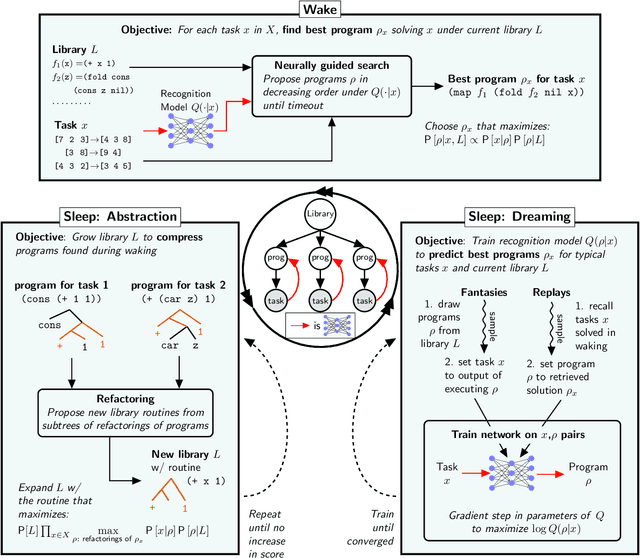
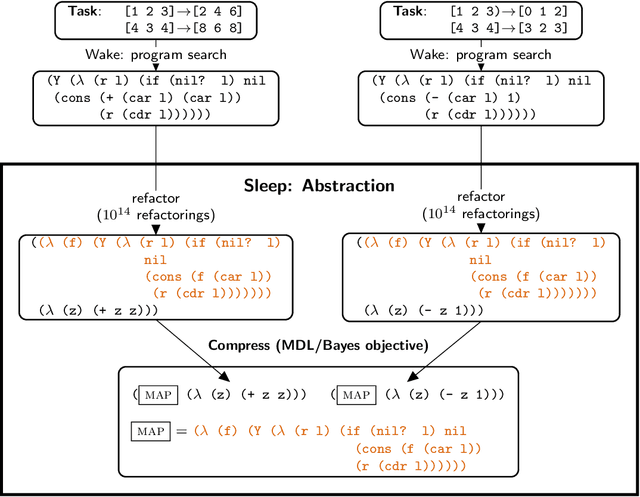
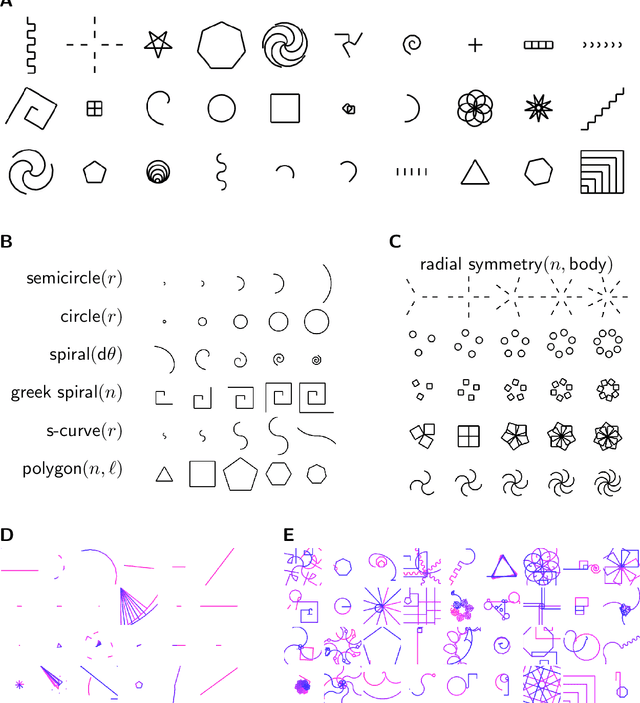
Expert problem-solving is driven by powerful languages for thinking about problems and their solutions. Acquiring expertise means learning these languages -- systems of concepts, alongside the skills to use them. We present DreamCoder, a system that learns to solve problems by writing programs. It builds expertise by creating programming languages for expressing domain concepts, together with neural networks to guide the search for programs within these languages. A ``wake-sleep'' learning algorithm alternately extends the language with new symbolic abstractions and trains the neural network on imagined and replayed problems. DreamCoder solves both classic inductive programming tasks and creative tasks such as drawing pictures and building scenes. It rediscovers the basics of modern functional programming, vector algebra and classical physics, including Newton's and Coulomb's laws. Concepts are built compositionally from those learned earlier, yielding multi-layered symbolic representations that are interpretable and transferrable to new tasks, while still growing scalably and flexibly with experience.