 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHypothesis Generation and Inductive Inference in Children and Language Models
May 23, 2026Real world decision-making requires constructing mental models under uncertainty over evidence, over the underlying causal rules, and over the state of the world itself. Which computational principles underpin human inference under such conditions, and do LLM-based agents exhibit similar behavior given matching constraints? We address these questions using an inductive inference Box Task in which participants, human children and LLM-based agents, infer a latent cause through sequential interaction with an uncertain environment. We formalize this task as program induction with Bayesian particle-based inference, admitting two complementary interpretations: (1) as a constraint satisfaction process over hypotheses, and (2) as a program synthesis problem in which hypotheses are executable programs evaluated against evidence. Using the constraint-based formulation, we show that children's behavior is best explained by a combination of subjective evidence reliability and online hypothesis generation, accounting for both their evidence-seeking patterns and their dissociation between task completion and rule generalization. Using the program synthesis formulation, we treat LLM-based agents as model organisms: controllable systems that allow systematic manipulation of task conditions. Across backends, LLM-based agents replicate children's responses to changes in evidence reliability and observability, including discounting unreliable evidence, seeking to resolve partial information, and dissociating between task completion and causal generalization. At the same time, LLM-based agents tend to over-observe and over-comply with instructions relative to children. These results suggest that while children and LLM-based agents adapt similarly to environmental structure, their information-seeking behavior exhibits distinct underlying costs and inductive biases.
Prospective Compression in Human Abstraction Learning
May 11, 2026A core challenge in program synthesis is online library learning: the incremental acquisition of reusable abstractions under uncertainty about future task demands. Existing algorithms treat library learning as retrospective compression over a static task distribution, where the learned library is determined by the corpus of past tasks. However, real-world learning domains are often non-stationary, with tasks arising from a generative process that evolves over time. We propose and test the hypothesis that in non-stationary domains human library learning selects abstractions prospectively: targeting compression of future tasks. We study this question using the Pattern Builder Task, a visual program synthesis paradigm in which participants construct increasingly complex geometric patterns from a small set of primitives, transformations, and custom helpers that carry forward across trials. Using this task, we conduct two experiments with complementary latent curricula, designed to dissociate between behaviors consistent with prospective compression, and alternative library learning accounts. Using six computational models spanning online library learning strategies, we show that human abstraction behavior reflects sensitivity to latent, non-stationary structure in the task-generating process. This behavior is consistent with prospective compression, and cannot be captured by existing retrospective compression-based algorithms, or inductive biases modeled by LLM-based program synthesis.
Online library learning in human visual puzzle solving
Mar 24, 2026When learning a novel complex task, people often form efficient reusable abstractions that simplify future work, despite uncertainty about the future. We study this process in a visual puzzle task where participants define and reuse helpers -- intermediate constructions that capture repeating structure. In an online experiment, participants solved puzzles of increasing difficulty. Early on, they created many helpers, favouring completeness over efficiency. With experience, helper use became more selective and efficient, reflecting sensitivity to reuse and cost. Access to helpers enabled participants to solve puzzles that were otherwise difficult or impossible. Computational modelling shows that human decision times and number of operations used to complete a puzzle increase with search space estimated by a program induction model with library learning. In contrast, raw program length predicts failure but not effort. Together, these results point to online library learning as a core mechanism in human problem solving, allowing people to flexibly build, refine, and reuse abstractions as task demands grow.
PoE-World: Compositional World Modeling with Products of Programmatic Experts
May 16, 2025Learning how the world works is central to building AI agents that can adapt to complex environments. Traditional world models based on deep learning demand vast amounts of training data, and do not flexibly update their knowledge from sparse observations. Recent advances in program synthesis using Large Language Models (LLMs) give an alternate approach which learns world models represented as source code, supporting strong generalization from little data. To date, application of program-structured world models remains limited to natural language and grid-world domains. We introduce a novel program synthesis method for effectively modeling complex, non-gridworld domains by representing a world model as an exponentially-weighted product of programmatic experts (PoE-World) synthesized by LLMs. We show that this approach can learn complex, stochastic world models from just a few observations. We evaluate the learned world models by embedding them in a model-based planning agent, demonstrating efficient performance and generalization to unseen levels on Atari's Pong and Montezuma's Revenge. We release our code and display the learned world models and videos of the agent's gameplay at https://topwasu.github.io/poe-world.
Cognitive maps are generative programs
Apr 29, 2025Making sense of the world and acting in it relies on building simplified mental representations that abstract away aspects of reality. This principle of cognitive mapping is universal to agents with limited resources. Living organisms, people, and algorithms all face the problem of forming functional representations of their world under various computing constraints. In this work, we explore the hypothesis that human resource-efficient planning may arise from representing the world as predictably structured. Building on the metaphor of concepts as programs, we propose that cognitive maps can take the form of generative programs that exploit predictability and redundancy, in contrast to directly encoding spatial layouts. We use a behavioral experiment to show that people who navigate in structured spaces rely on modular planning strategies that align with programmatic map representations. We describe a computational model that predicts human behavior in a variety of structured scenarios. This model infers a small distribution over possible programmatic cognitive maps conditioned on human prior knowledge of the world, and uses this distribution to generate resource-efficient plans. Our models leverages a Large Language Model as an embedding of human priors, implicitly learned through training on a vast corpus of human data. Our model demonstrates improved computational efficiency, requires drastically less memory, and outperforms unstructured planning algorithms with cognitive constraints at predicting human behavior, suggesting that human planning strategies rely on programmatic cognitive maps.
Modeling human intention inference in continuous 3D domains by inverse planning and body kinematics
Dec 02, 2021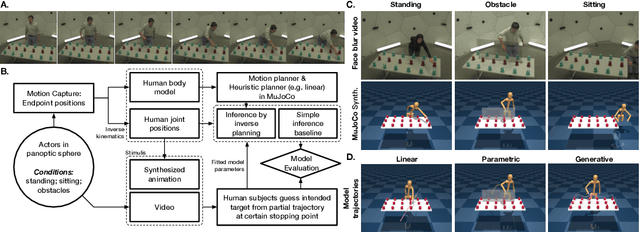
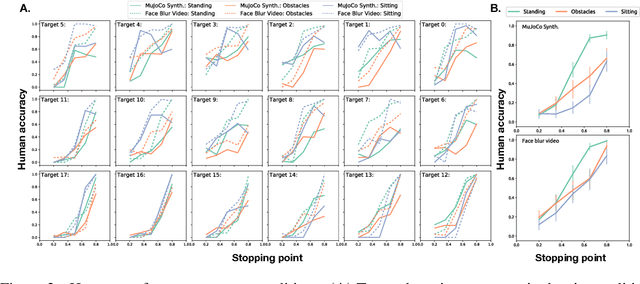
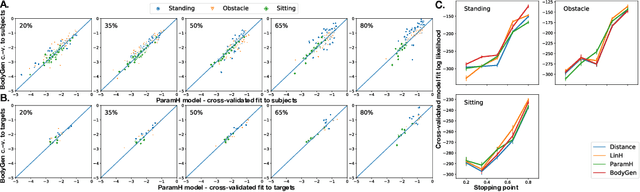
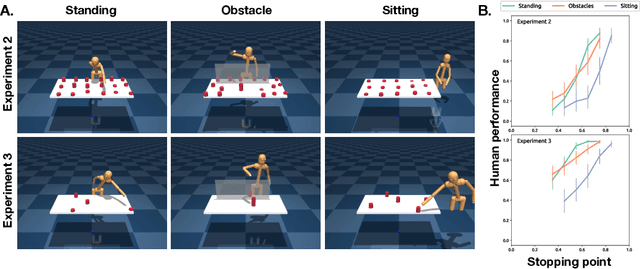
How to build AI that understands human intentions, and uses this knowledge to collaborate with people? We describe a computational framework for evaluating models of goal inference in the domain of 3D motor actions, which receives as input the 3D coordinates of an agent's body, and of possible targets, to produce a continuously updated inference of the intended target. We evaluate our framework in three behavioural experiments using a novel Target Reaching Task, in which human observers infer intentions of actors reaching for targets among distracts. We describe Generative Body Kinematics model, which predicts human intention inference in this domain using Bayesian inverse planning and inverse body kinematics. We compare our model to three heuristics, which formalize the principle of least effort using simple assumptions about the actor's constraints, without the use of inverse planning. Despite being more computationally costly, the Generative Body Kinematics model outperforms the heuristics in certain scenarios, such as environments with obstacles, and at the beginning of reaching actions while the actor is relatively far from the intended target. The heuristics make increasingly accurate predictions during later stages of reaching actions, such as, when the intended target is close, and can be inferred by extrapolating the wrist trajectory. Our results identify contexts in which inverse body kinematics is useful for intention inference. We show that human observers indeed rely on inverse body kinematics in such scenarios, suggesting that modeling body kinematic can improve performance of inference algorithms.
Map Induction: Compositional spatial submap learning for efficient exploration in novel environments
Oct 23, 2021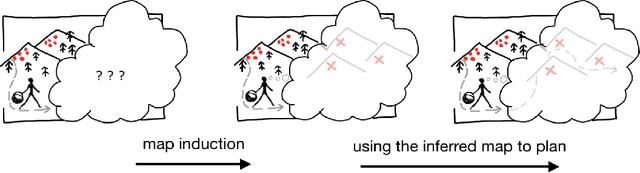
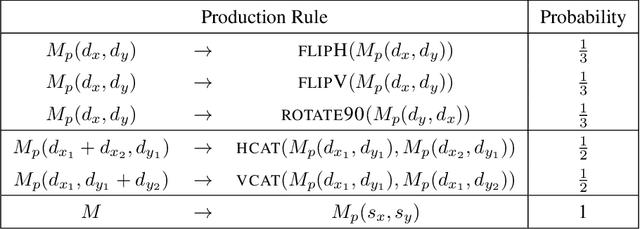
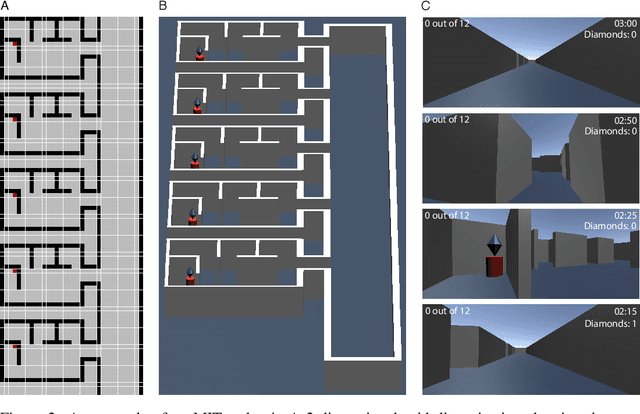
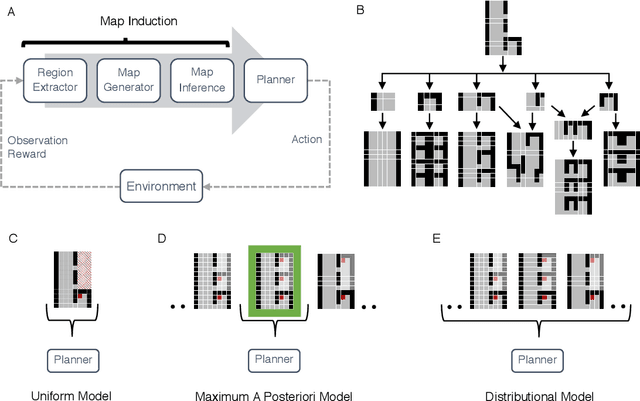
Humans are expert explorers. Understanding the computational cognitive mechanisms that support this efficiency can advance the study of the human mind and enable more efficient exploration algorithms. We hypothesize that humans explore new environments efficiently by inferring the structure of unobserved spaces using spatial information collected from previously explored spaces. This cognitive process can be modeled computationally using program induction in a Hierarchical Bayesian framework that explicitly reasons about uncertainty with strong spatial priors. Using a new behavioral Map Induction Task, we demonstrate that this computational framework explains human exploration behavior better than non-inductive models and outperforms state-of-the-art planning algorithms when applied to a realistic spatial navigation domain.
Communicating Natural Programs to Humans and Machines
Jun 15, 2021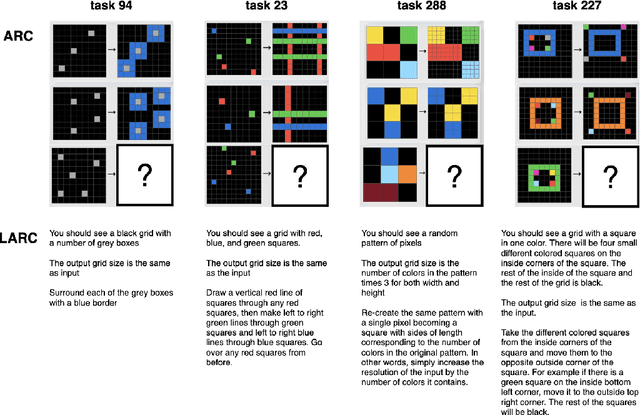
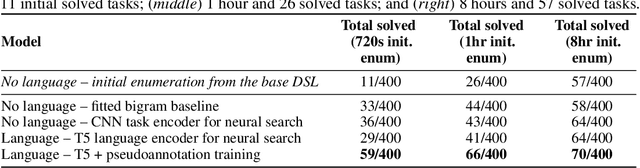
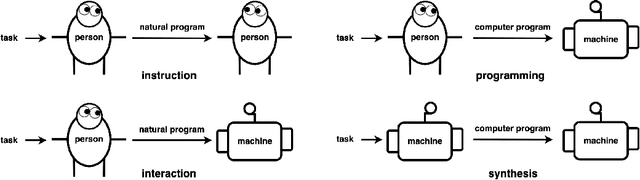
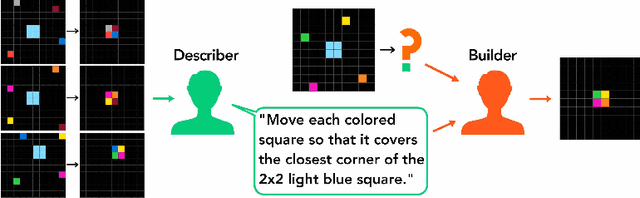
The Abstraction and Reasoning Corpus (ARC) is a set of tasks that tests an agent's ability to flexibly solve novel problems. While most ARC tasks are easy for humans, they are challenging for state-of-the-art AI. How do we build intelligent systems that can generalize to novel situations and understand human instructions in domains such as ARC? We posit that the answer may be found by studying how humans communicate to each other in solving these tasks. We present LARC, the Language-annotated ARC: a collection of natural language descriptions by a group of human participants, unfamiliar both with ARC and with each other, who instruct each other on how to solve ARC tasks. LARC contains successful instructions for 88\% of the ARC tasks. We analyze the collected instructions as `natural programs', finding that most natural program concepts have analogies in typical computer programs. However, unlike how one precisely programs a computer, we find that humans both anticipate and exploit ambiguities to communicate effectively. We demonstrate that a state-of-the-art program synthesis technique, which leverages the additional language annotations, outperforms its language-free counterpart.
Learning abstract structure for drawing by efficient motor program induction
Aug 08, 2020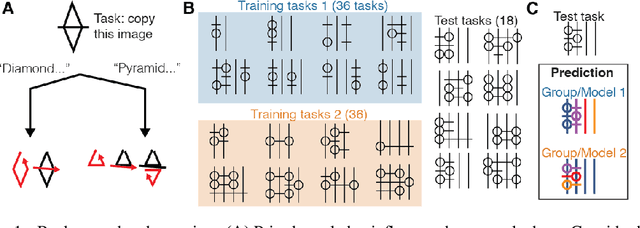
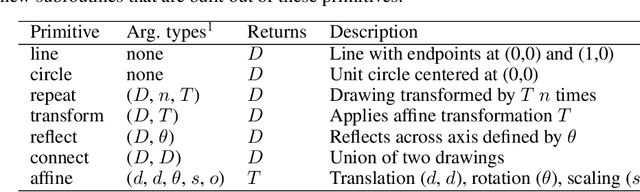
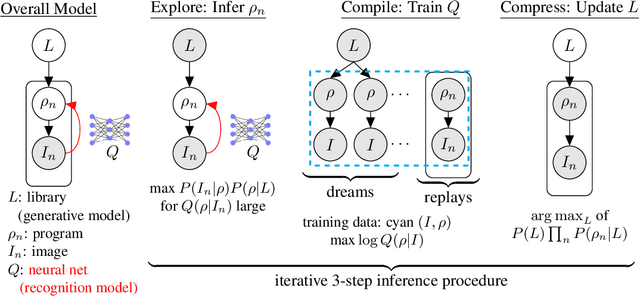
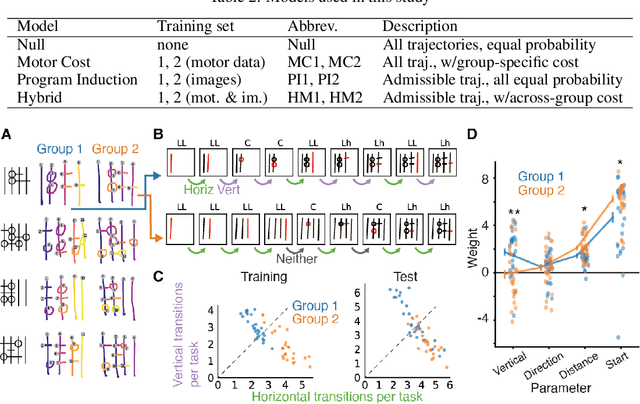
Humans flexibly solve new problems that differ qualitatively from those they were trained on. This ability to generalize is supported by learned concepts that capture structure common across different problems. Here we develop a naturalistic drawing task to study how humans rapidly acquire structured prior knowledge. The task requires drawing visual objects that share underlying structure, based on a set of composable geometric rules. We show that people spontaneously learn abstract drawing procedures that support generalization, and propose a model of how learners can discover these reusable drawing programs. Trained in the same setting as humans, and constrained to produce efficient motor actions, this model discovers new drawing routines that transfer to test objects and resemble learned features of human sequences. These results suggest that two principles guiding motor program induction in the model - abstraction (general programs that ignore object-specific details) and compositionality (recombining previously learned programs) - are key for explaining how humans learn structured internal representations that guide flexible reasoning and learning.
Program Synthesis with Pragmatic Communication
Jul 09, 2020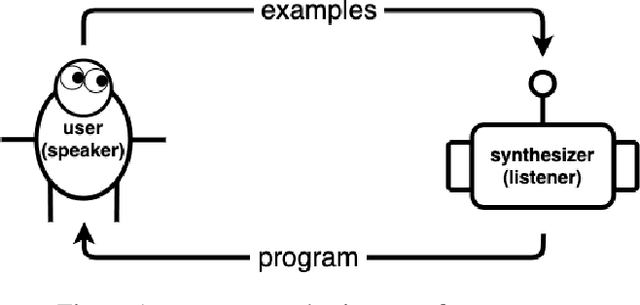
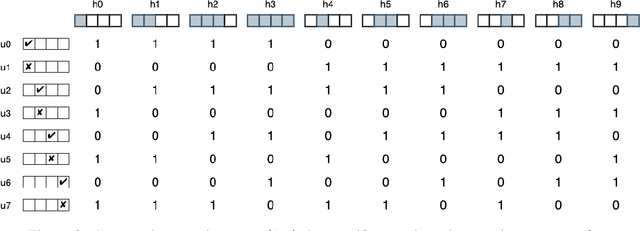
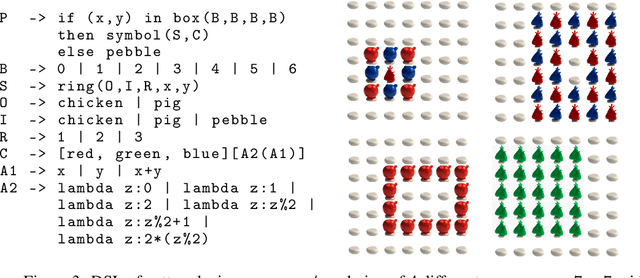
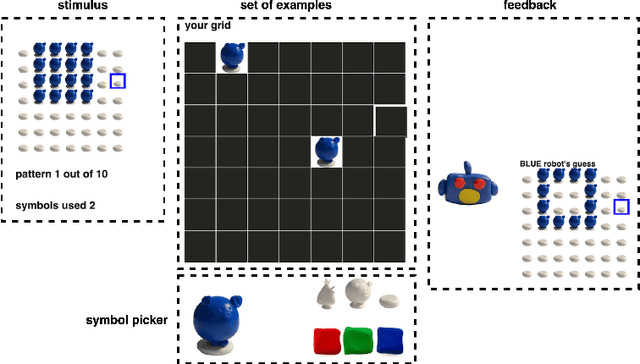
Program synthesis techniques construct or infer programs from user-provided specifications, such as input-output examples. Yet most specifications, especially those given by end-users, leave the synthesis problem radically ill-posed, because many programs may simultaneously satisfy the specification. Prior work resolves this ambiguity by using various inductive biases, such as a preference for simpler programs. This work introduces a new inductive bias derived by modeling the program synthesis task as rational communication, drawing insights from recursive reasoning models of pragmatics. Given a specification, we score a candidate program both on its consistency with the specification, and also whether a rational speaker would chose this particular specification to communicate that program. We develop efficient algorithms for such an approach when learning from input-output examples, and build a pragmatic program synthesizer over a simple grid-like layout domain. A user study finds that end-user participants communicate more effectively with the pragmatic program synthesizer over a non-pragmatic one.