 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrePARE: Predictive Proprioception for Agile Failure Event Detection in Robotic Exploration of Extreme Terrains
Jul 30, 2022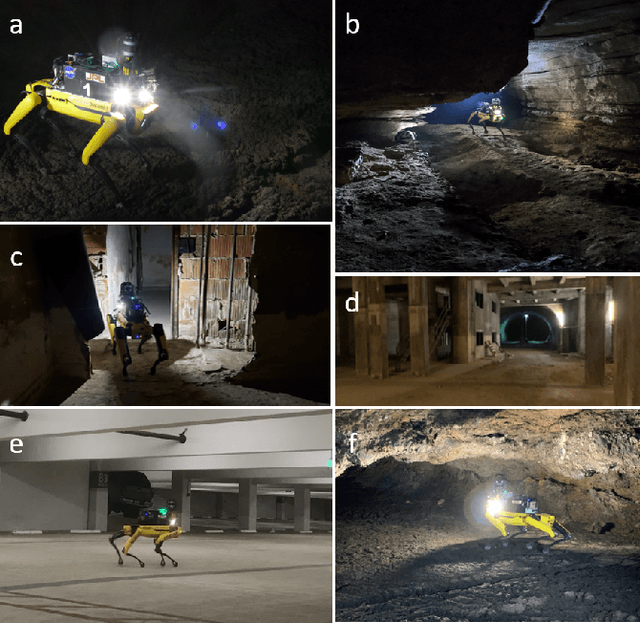
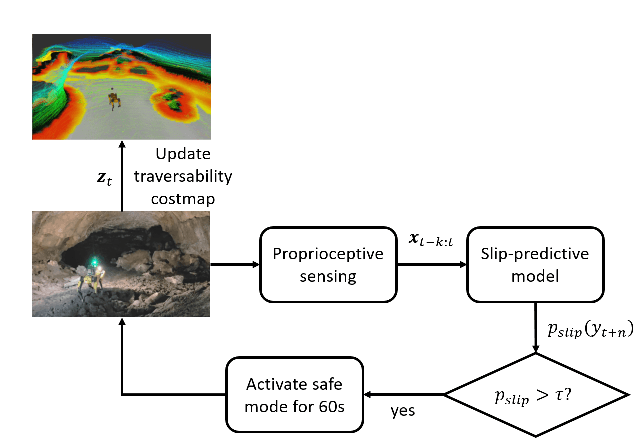
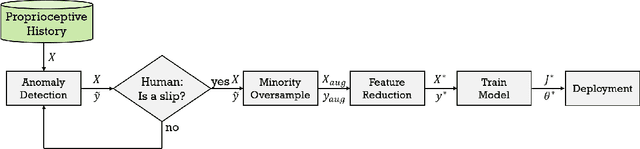
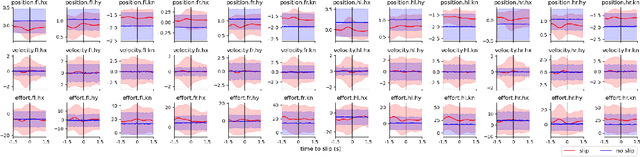
Legged robots can traverse a wide variety of terrains, some of which may be challenging for wheeled robots, such as stairs or highly uneven surfaces. However, quadruped robots face stability challenges on slippery surfaces. This can be resolved by adjusting the robot's locomotion by switching to more conservative and stable locomotion modes, such as crawl mode (where three feet are in contact with the ground always) or amble mode (where one foot touches down at a time) to prevent potential falls. To tackle these challenges, we propose an approach to learn a model from past robot experience for predictive detection of potential failures. Accordingly, we trigger gait switching merely based on proprioceptive sensory information. To learn this predictive model, we propose a semi-supervised process for detecting and annotating ground truth slip events in two stages: We first detect abnormal occurrences in the time series sequences of the gait data using an unsupervised anomaly detector, and then, the anomalies are verified with expert human knowledge in a replay simulation to assert the event of a slip. These annotated slip events are then used as ground truth examples to train an ensemble decision learner for predicting slip probabilities across terrains for traversability. We analyze our model on data recorded by a legged robot on multiple sites with slippery terrain. We demonstrate that a potential slip event can be predicted up to 720 ms ahead of a potential fall with an average precision greater than 0.95 and an average F-score of 0.82. Finally, we validate our approach in real-time by deploying it on a legged robot and switching its gait mode based on slip event detection.
Sample-Based Bounds for Coherent Risk Measures: Applications to Policy Synthesis and Verification
Apr 21, 2022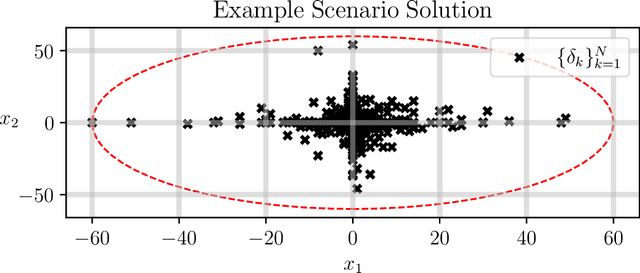
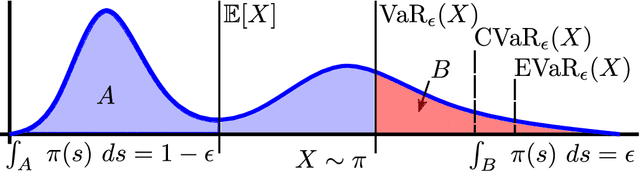
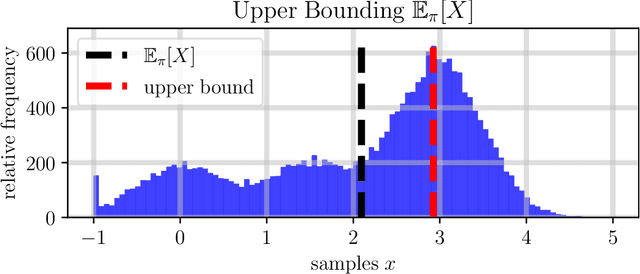
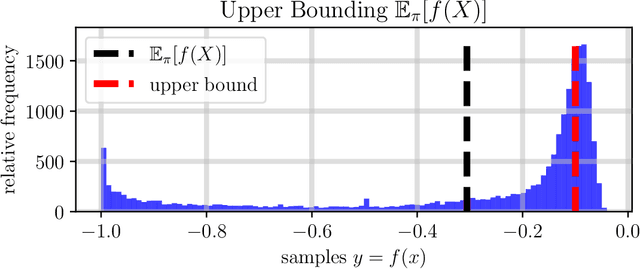
The dramatic increase of autonomous systems subject to variable environments has given rise to the pressing need to consider risk in both the synthesis and verification of policies for these systems. This paper aims to address a few problems regarding risk-aware verification and policy synthesis, by first developing a sample-based method to bound the risk measure evaluation of a random variable whose distribution is unknown. These bounds permit us to generate high-confidence verification statements for a large class of robotic systems. Second, we develop a sample-based method to determine solutions to non-convex optimization problems that outperform a large fraction of the decision space of possible solutions. Both sample-based approaches then permit us to rapidly synthesize risk-aware policies that are guaranteed to achieve a minimum level of system performance. To showcase our approach in simulation, we verify a cooperative multi-agent system and develop a risk-aware controller that outperforms the system's baseline controller. We also mention how our approach can be extended to account for any $g$-entropic risk measure - the subset of coherent risk measures on which we focus.
Risk-Averse Receding Horizon Motion Planning
Apr 20, 2022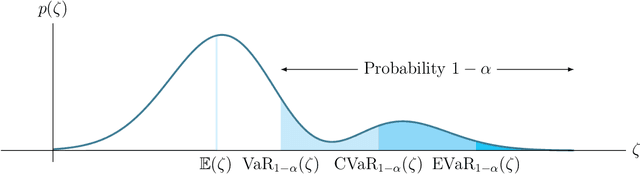
This paper studies the problem of risk-averse receding horizon motion planning for agents with uncertain dynamics, in the presence of stochastic, dynamic obstacles. We propose a model predictive control (MPC) scheme that formulates the obstacle avoidance constraint using coherent risk measures. To handle disturbances, or process noise, in the state dynamics, the state constraints are tightened in a risk-aware manner to provide a disturbance feedback policy. We also propose a waypoint following algorithm that uses the proposed MPC scheme for discrete distributions and prove its risk-sensitive recursive feasibility while guaranteeing finite-time task completion. We further investigate some commonly used coherent risk metrics, namely, conditional value-at-risk (CVaR), entropic value-at-risk (EVaR), and g-entropic risk measures, and propose a tractable incorporation within MPC. We illustrate our framework via simulation studies.
Distributionally Robust Model Predictive Control with Total Variation Distance
Apr 10, 2022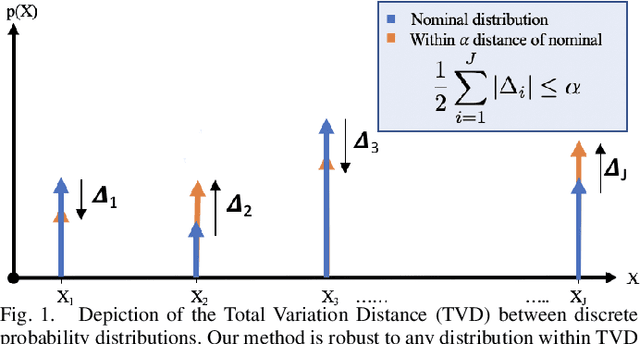
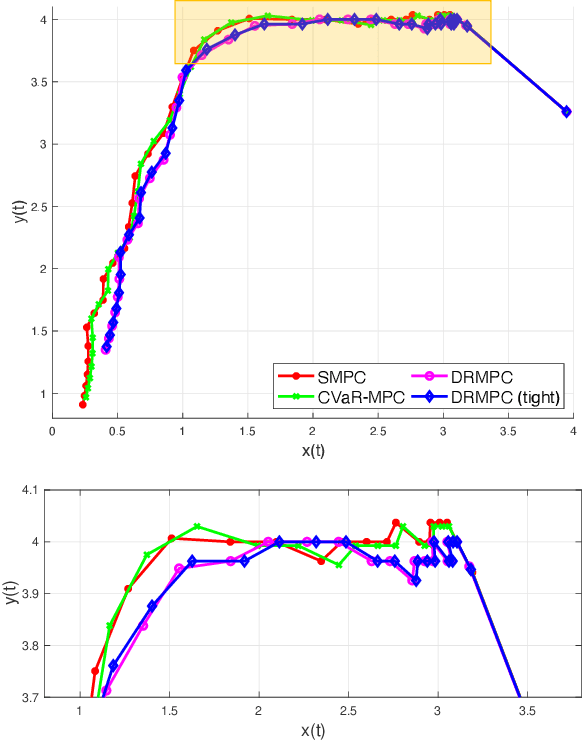
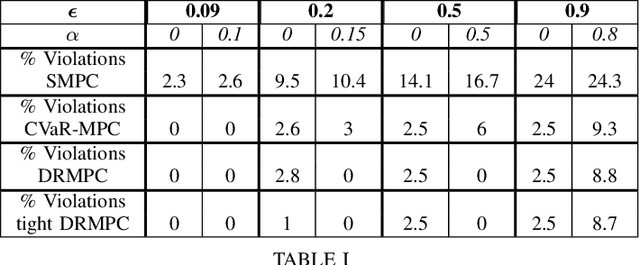
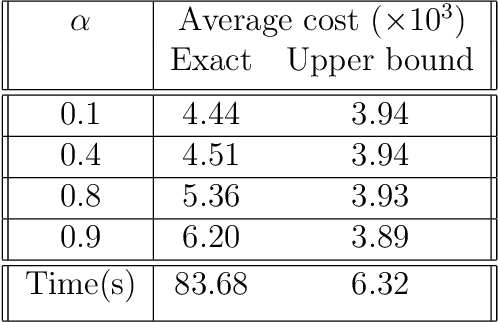
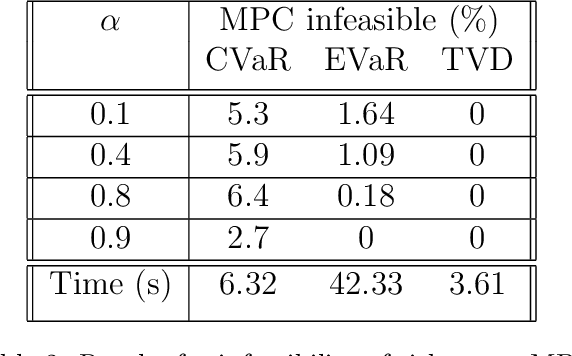
This paper studies the problem of distributionally robust model predictive control (MPC) using total variation distance ambiguity sets. For a discrete-time linear system with additive disturbances, we provide a conditional value-at-risk reformulation of the MPC optimization problem that is distributionally robust in the expected cost and chance constraints. The distributionally robust chance constraint is over-approximated as a tightened chance constraint, wherein the tightening for each time step in the MPC can be computed offline, hence reducing the computational burden. We conclude with numerical experiments to support our results on the probabilistic guarantees and computational efficiency.
Moving Obstacle Avoidance: a Data-Driven Risk-Aware Approach
Mar 25, 2022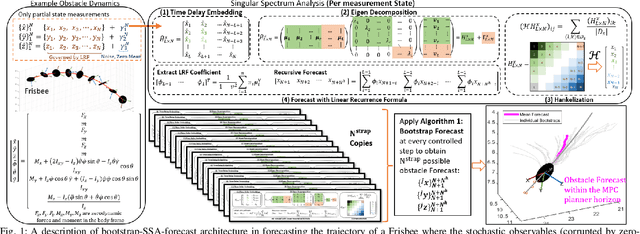
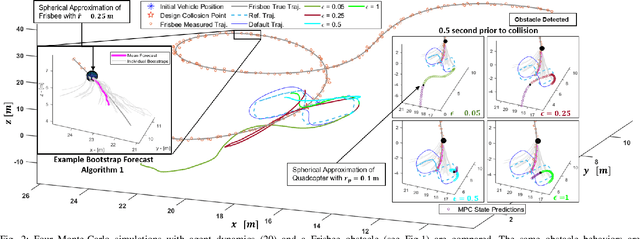
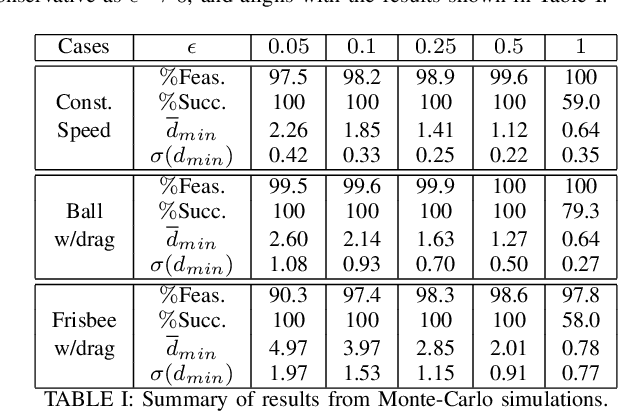
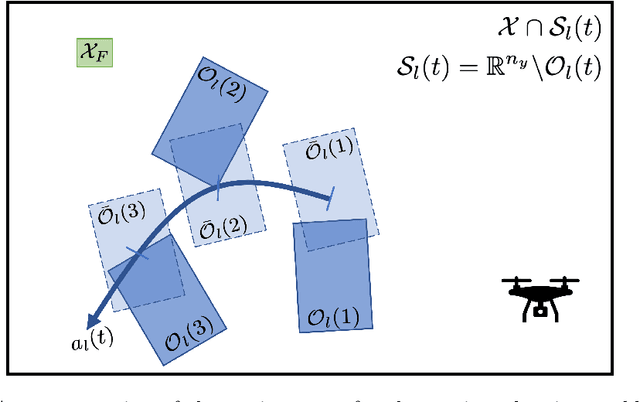
This paper proposes a new structured method for a moving agent to predict the paths of dynamically moving obstacles and avoid them using a risk-aware model predictive control (MPC) scheme. Given noisy measurements of the a priori unknown obstacle trajectory, a bootstrapping technique predicts a set of obstacle trajectories. The bootstrapped predictions are incorporated in the MPC optimization using a risk-aware methodology so as to provide probabilistic guarantees on obstacle avoidance. We validate our methods using simulations of a 3-dimensional multi-rotor drone that avoids various moving obstacles, such as a thrown ball and a frisbee with air drag.
NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge
Mar 28, 2021



This paper presents and discusses algorithms, hardware, and software architecture developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), competing in the DARPA Subterranean Challenge. Specifically, it presents the techniques utilized within the Tunnel (2019) and Urban (2020) competitions, where CoSTAR achieved 2nd and 1st place, respectively. We also discuss CoSTAR's demonstrations in Martian-analog surface and subsurface (lava tubes) exploration. The paper introduces our autonomy solution, referred to as NeBula (Networked Belief-aware Perceptual Autonomy). NeBula is an uncertainty-aware framework that aims at enabling resilient and modular autonomy solutions by performing reasoning and decision making in the belief space (space of probability distributions over the robot and world states). We discuss various components of the NeBula framework, including: (i) geometric and semantic environment mapping; (ii) a multi-modal positioning system; (iii) traversability analysis and local planning; (iv) global motion planning and exploration behavior; (i) risk-aware mission planning; (vi) networking and decentralized reasoning; and (vii) learning-enabled adaptation. We discuss the performance of NeBula on several robot types (e.g. wheeled, legged, flying), in various environments. We discuss the specific results and lessons learned from fielding this solution in the challenging courses of the DARPA Subterranean Challenge competition.
Risk-Averse Stochastic Shortest Path Planning
Mar 26, 2021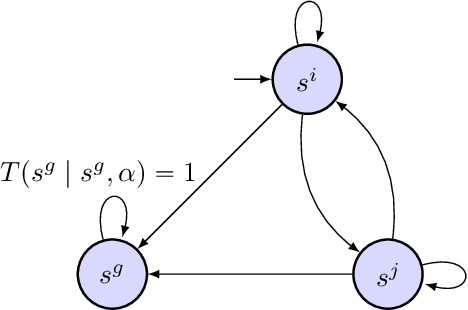
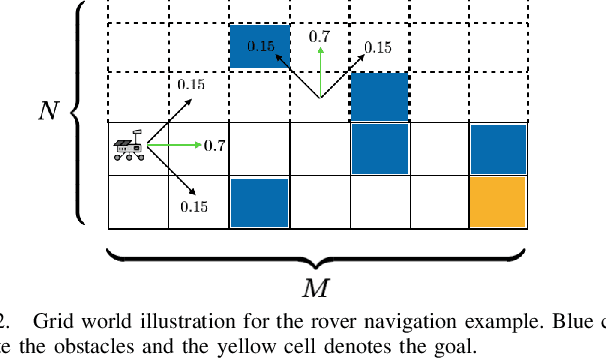
We consider the stochastic shortest path planning problem in MDPs, i.e., the problem of designing policies that ensure reaching a goal state from a given initial state with minimum accrued cost. In order to account for rare but important realizations of the system, we consider a nested dynamic coherent risk total cost functional rather than the conventional risk-neutral total expected cost. Under some assumptions, we show that optimal, stationary, Markovian policies exist and can be found via a special Bellman's equation. We propose a computational technique based on difference convex programs (DCPs) to find the associated value functions and therefore the risk-averse policies. A rover navigation MDP is used to illustrate the proposed methodology with conditional-value-at-risk (CVaR) and entropic-value-at-risk (EVaR) coherent risk measures.
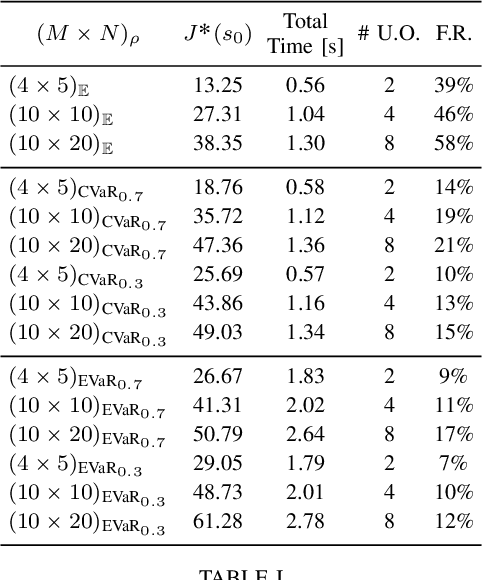
STEP: Stochastic Traversability Evaluation and Planning for Safe Off-road Navigation
Mar 04, 2021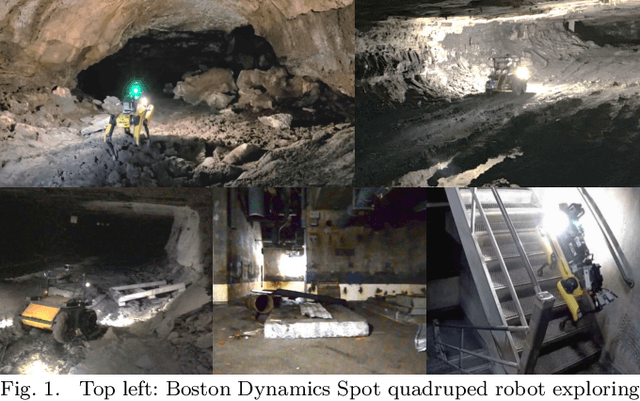
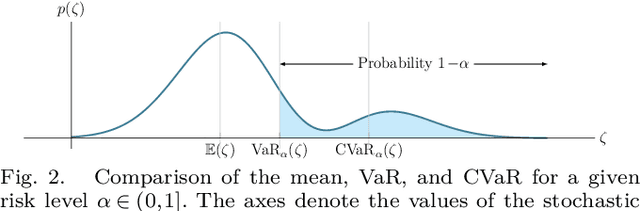
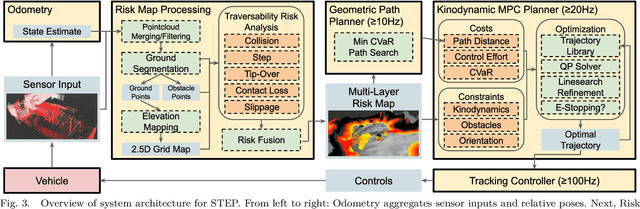
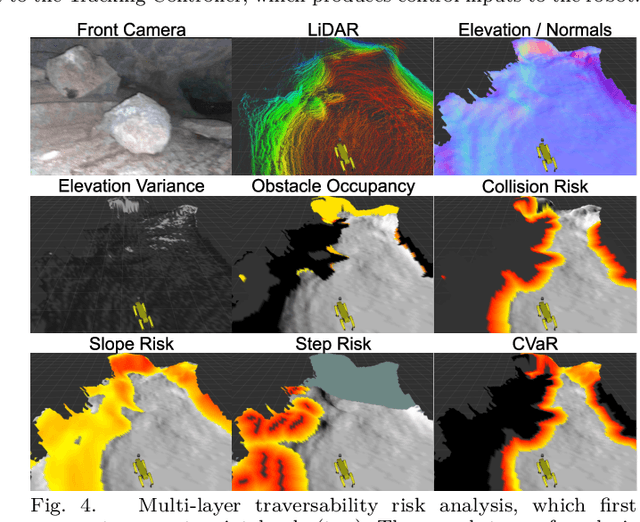
Although ground robotic autonomy has gained widespread usage in structured and controlled environments, autonomy in unknown and off-road terrain remains a difficult problem. Extreme, off-road, and unstructured environments such as undeveloped wilderness, caves, and rubble pose unique and challenging problems for autonomous navigation. To tackle these problems we propose an approach for assessing traversability and planning a safe, feasible, and fast trajectory in real-time. Our approach, which we name STEP (Stochastic Traversability Evaluation and Planning), relies on: 1) rapid uncertainty-aware mapping and traversability evaluation, 2) tail risk assessment using the Conditional Value-at-Risk (CVaR), and 3) efficient risk and constraint-aware kinodynamic motion planning using sequential quadratic programming-based (SQP) model predictive control (MPC). We analyze our method in simulation and validate its efficacy on wheeled and legged robotic platforms exploring extreme terrains including an underground lava tube.
Risk-Sensitive Motion Planning using Entropic Value-at-Risk
Nov 23, 2020
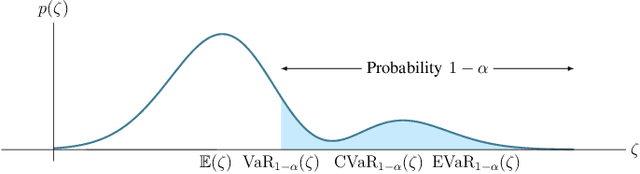
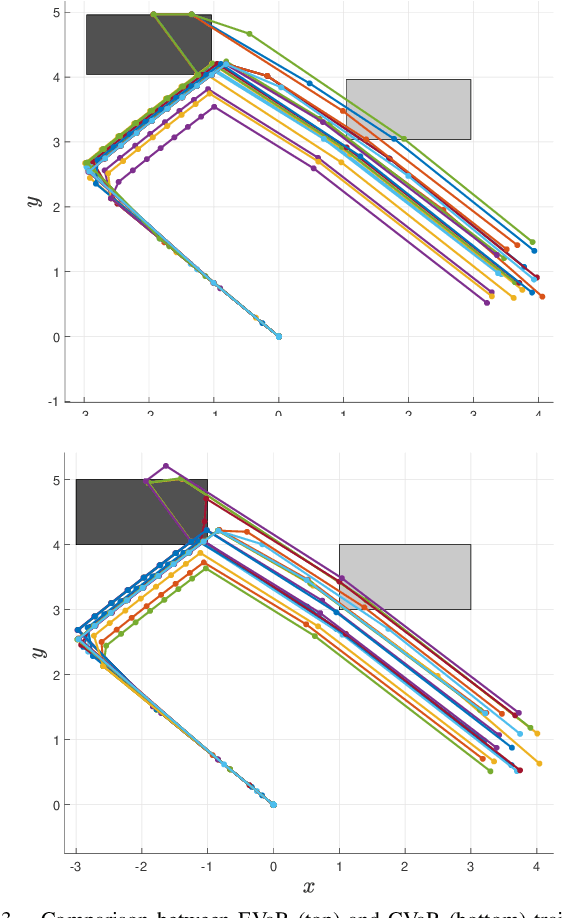
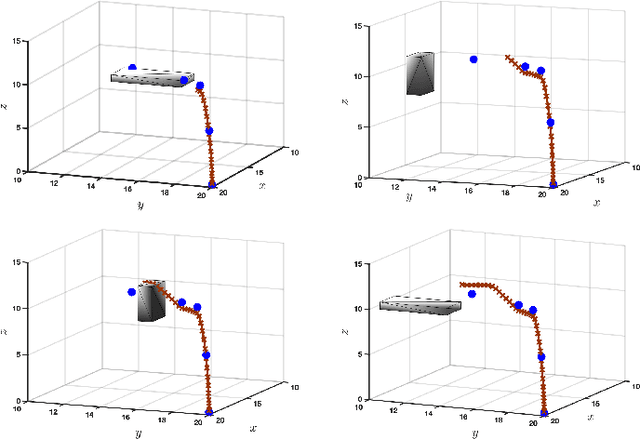
We consider the problem of risk-sensitive motion planning in the presence of randomly moving obstacles. To this end, we adopt a model predictive control (MPC) scheme and pose the obstacle avoidance constraint in the MPC problem as a distributionally robust constraint with a KL divergence ambiguity set. This constraint is the dual representation of the Entropic Value-at-Risk (EVaR). Building upon this viewpoint, we propose an algorithm to follow waypoints and discuss its feasibility and completion in finite time. We compare the policies obtained using EVaR with those obtained using another common coherent risk measure, Conditional Value-at-Risk (CVaR), via numerical experiments for a 2D system. We also implement the waypoint following algorithm on a 3D quadcopter simulation.
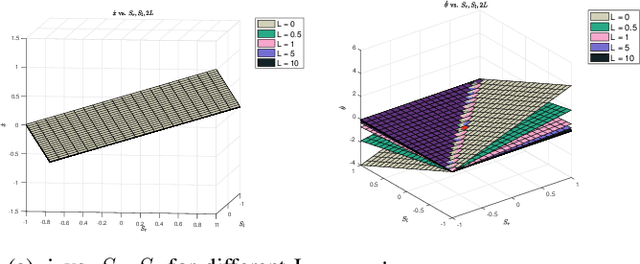
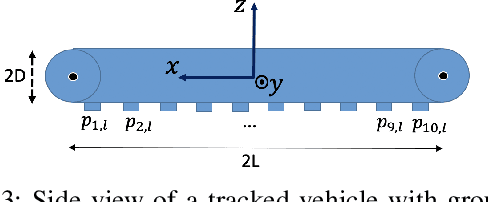
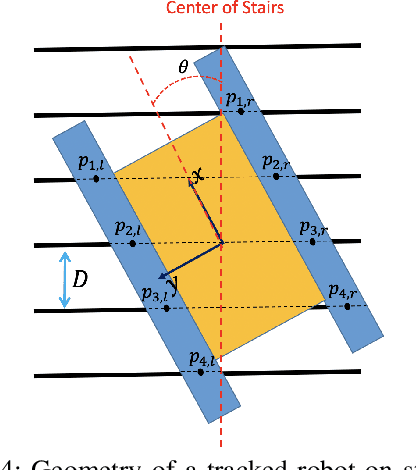
The Kinematics of Tracked Vehicles via the Power Dissipation Method
Apr 10, 2020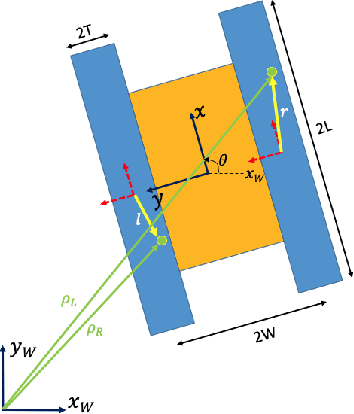
This paper develops a new quasi-static modeling framework for tracked robots based on the power dissipation method. Given a set of track speeds, this method predicts the vehicle's instantaneous rigid body motion. We introduce three specific models: a model for tracked operation on flat ground, a model for vehicle motion when the track's grouser tips touch the ground, and a model for operation on stairs. Experiments show that these models predict tracked vehicle motion more accurately than existing kinematic models, and predict phenomena which are not captured by other models. These novel models provide a basis for new feedback control approaches.