 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Safety-Critical Framework for UGVs in Complex Environments: A Data-Driven Discrepancy-Aware Approach
Mar 05, 2024



This work presents a novel data-driven multi-layered planning and control framework for the safe navigation of a class of unmanned ground vehicles (UGVs) in the presence of unknown stationary obstacles and additive modeling uncertainties. The foundation of this framework is a novel robust model predictive planner, designed to generate optimal collision-free trajectories given an occupancy grid map, and a paired ancillary controller, augmented to provide robustness against model uncertainties extracted from learning data. To tackle modeling discrepancies, we identify both matched (input discrepancies) and unmatched model residuals between the true and the nominal reduced-order models using closed-loop tracking errors as training data. Utilizing conformal prediction, we extract probabilistic upper bounds for the unknown model residuals, which serve to construct a robustifying ancillary controller. Further, we also determine maximum tracking discrepancies, also known as the robust control invariance tube, under the augmented policy, formulating them as collision buffers. Employing a LiDAR-based occupancy map to characterize the environment, we construct a discrepancy-aware cost map that incorporates these collision buffers. This map is then integrated into a sampling-based model predictive path planner that generates optimal and safe trajectories that can be robustly tracked by the augmented ancillary controller in the presence of model mismatches. The effectiveness of the framework is experimentally validated for autonomous high-speed trajectory tracking in a cluttered environment with four different vehicle-terrain configurations. We also showcase the framework's versatility by reformulating it as a driver-assist program, providing collision avoidance corrections based on user joystick commands.
A Learning-Based Framework for Safe Human-Robot Collaboration with Multiple Backup Control Barrier Functions
Oct 09, 2023



Ensuring robot safety in complex environments is a difficult task due to actuation limits, such as torque bounds. This paper presents a safety-critical control framework that leverages learning-based switching between multiple backup controllers to formally guarantee safety under bounded control inputs while satisfying driver intention. By leveraging backup controllers designed to uphold safety and input constraints, backup control barrier functions (BCBFs) construct implicitly defined control invariance sets via a feasible quadratic program (QP). However, BCBF performance largely depends on the design and conservativeness of the chosen backup controller, especially in our setting of human-driven vehicles in complex, e.g, off-road, conditions. While conservativeness can be reduced by using multiple backup controllers, determining when to switch is an open problem. Consequently, we develop a broadcast scheme that estimates driver intention and integrates BCBFs with multiple backup strategies for human-robot interaction. An LSTM classifier uses data inputs from the robot, human, and safety algorithms to continually choose a backup controller in real-time. We demonstrate our method's efficacy on a dual-track robot in obstacle avoidance scenarios. Our framework guarantees robot safety while adhering to driver intention.
Learning Disturbances Online for Risk-Aware Control: Risk-Aware Flight with Less Than One Minute of Data
Dec 12, 2022Recent advances in safety-critical risk-aware control are predicated on apriori knowledge of the disturbances a system might face. This paper proposes a method to efficiently learn these disturbances online, in a risk-aware context. First, we introduce the concept of a Surface-at-Risk, a risk measure for stochastic processes that extends Value-at-Risk -- a commonly utilized risk measure in the risk-aware controls community. Second, we model the norm of the state discrepancy between the model and the true system evolution as a scalar-valued stochastic process and determine an upper bound to its Surface-at-Risk via Gaussian Process Regression. Third, we provide theoretical results on the accuracy of our fitted surface subject to mild assumptions that are verifiable with respect to the data sets collected during system operation. Finally, we experimentally verify our procedure by augmenting a drone's controller and highlight performance increases achieved via our risk-aware approach after collecting less than a minute of operating data.
Moving Obstacle Avoidance: a Data-Driven Risk-Aware Approach
Mar 25, 2022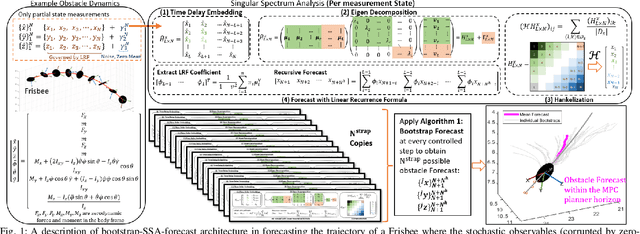
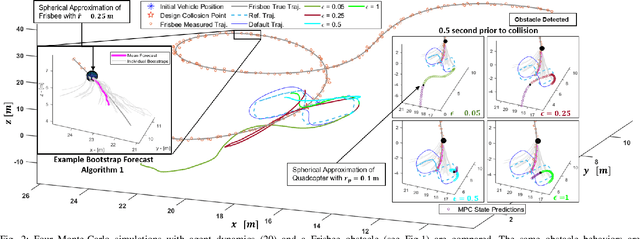
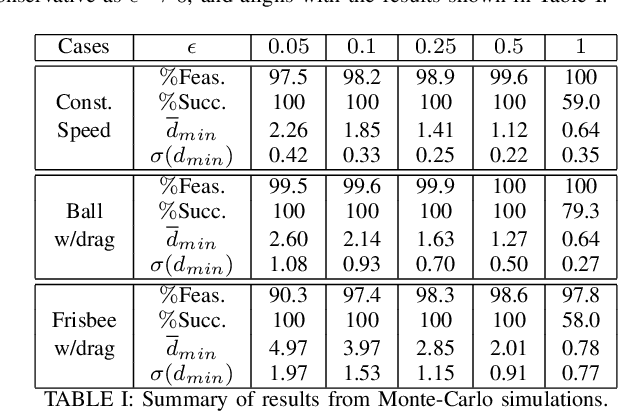
This paper proposes a new structured method for a moving agent to predict the paths of dynamically moving obstacles and avoid them using a risk-aware model predictive control (MPC) scheme. Given noisy measurements of the a priori unknown obstacle trajectory, a bootstrapping technique predicts a set of obstacle trajectories. The bootstrapped predictions are incorporated in the MPC optimization using a risk-aware methodology so as to provide probabilistic guarantees on obstacle avoidance. We validate our methods using simulations of a 3-dimensional multi-rotor drone that avoids various moving obstacles, such as a thrown ball and a frisbee with air drag.
Differential Flatness and Flatness Inspired Control of Aerial Manipulators based on Lagrangian Reduction
Nov 02, 2021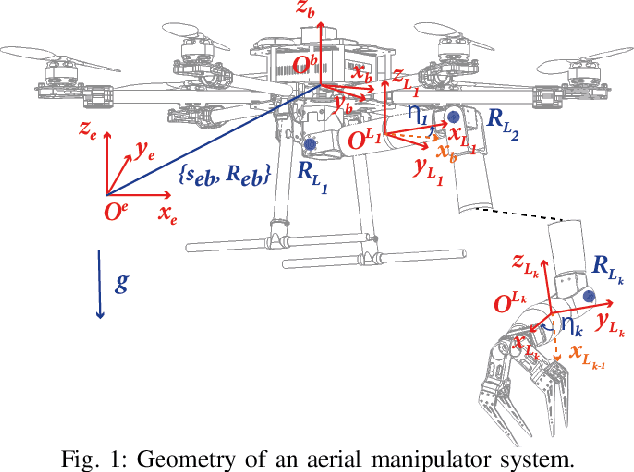
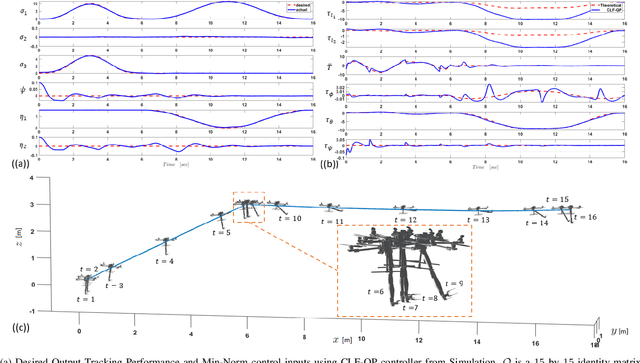
This paper shows that the dynamics of a general class of aerial manipulators, consist of an underactuated multi-rotor base with an arbitrary k-linked articulated manipulator, are differentially flat. Methods of Lagrangian Reduction under broken symmetries produce reduced equations of motion whose key variables: center-of-mass linear momentum, vehicle yaw angle, and manipulator relative joint angles become the flat outputs. Utilizing flatness theory and a second-order dynamic extension of the thrust input, we transform the mechanics of aerial manipulators to their equivalent trivial form with a valid relative degree. Using this flatness transformation, a quadratic programming-based controller is proposed within a Control Lyapunov Function (CLF-QP) framework, and its performance is verified in simulation.
Quadrotor Trajectory Tracking with Learned Dynamics: Joint Koopman-based Learning of System Models and Function Dictionaries
Oct 20, 2021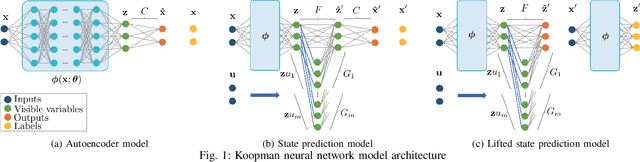
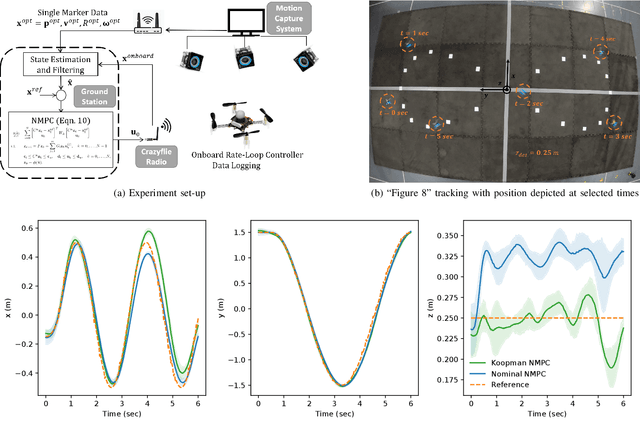
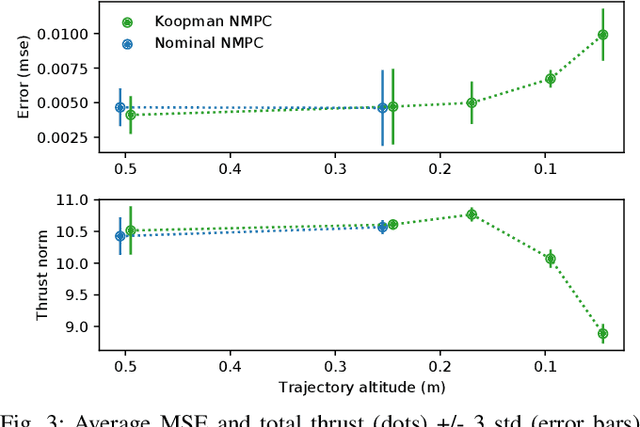
Nonlinear dynamical effects are crucial to the operation of many agile robotic systems. Koopman-based model learning methods can capture these nonlinear dynamical system effects in higher dimensional lifted bilinear models that are amenable to optimal control. However, standard methods that lift the system state using a fixed function dictionary before model learning result in high dimensional models that are intractable for real time control. This paper presents a novel method that jointly learns a function dictionary and lifted bilinear model purely from data by incorporating the Koopman model in a neural network architecture. Nonlinear MPC design utilizing the learned model can be performed readily. We experimentally realized this method on a multirotor drone for agile trajectory tracking at low altitudes where the aerodynamic ground effect influences the system's behavior. Experimental results demonstrate that the learning-based controller achieves similar performance as a nonlinear MPC based on a nominal dynamics model in medium altitude. However, our learning-based system can reliably track trajectories in near-ground flight regimes while the nominal controller crashes due to unmodeled dynamical effects that are captured by our method.