 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Solving the Workflow Satisfiability Problem using General Purpose Solvers
May 07, 2021
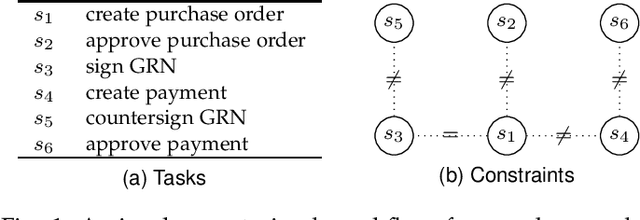
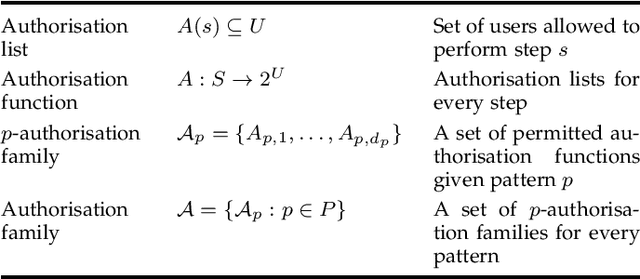
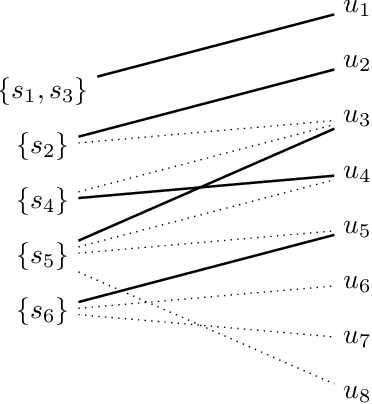
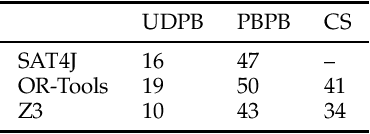
The workflow satisfiability problem (WSP) is a well-studied problem in access control seeking allocation of authorised users to every step of the workflow, subject to workflow specification constraints. It was noticed that the number $k$ of steps is typically small compared to the number of users in the real-world instances of WSP; therefore $k$ is considered as the parameter in WSP parametrised complexity research. While WSP in general was shown to be W[1]-hard, WSP restricted to a special case of user-independent (UI) constraints is fixed-parameter tractable (FPT). However, restriction to the UI constraints might be impractical. To efficiently handle non-UI constraints, we introduce the notion of branching factor of a constraint. As long as the branching factors of the constraints are relatively small and the number of non-UI constraints is reasonable, WSP can be solved in FPT time. Extending the results from Karapetyan et al. (2019), we demonstrate that general-purpose solvers are capable of achieving FPT-like performance on WSP with arbitrary constraints when used with appropriate formulations. This enables one to tackle most of practical WSP instances. While important on its own, we hope that this result will also motivate researchers to look for FPT-aware formulations of other FPT problems.
Modeling the dynamics of language change: logistic regression, Piotrowski's law, and a handful of examples in Polish
Apr 13, 2021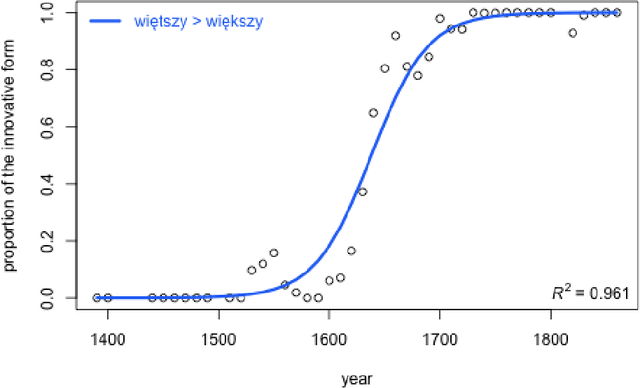
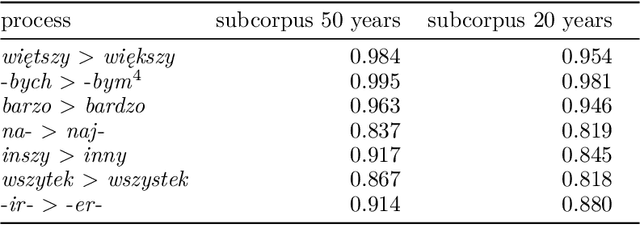
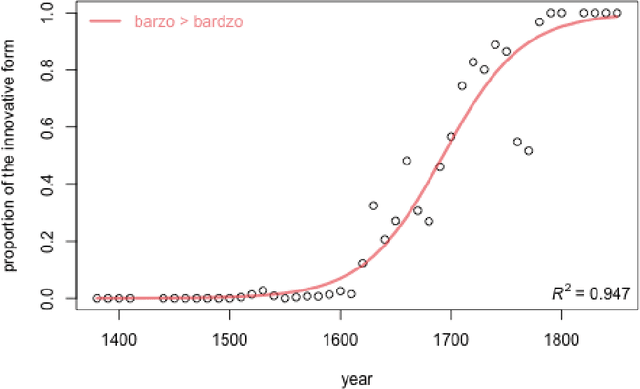
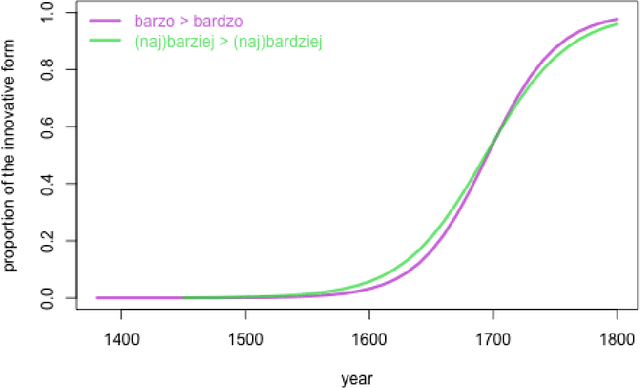
The study discusses modeling diachronic processes by logistic regression. Such an approach was suggested by Raimund Piotrowski (hence labelled as Piotrowski's law), even if actual linguistic evidence usually speaks against using the notion of a "law" in this context. In our study, we apply logistic regression models to 9 changes which occurred between 15th and 18th century in the Polish language. The attested course of the majority of these changes closely follow the expected values, which proves that the language change might indeed resemble a nonlinear phase change scenario. We also extend the original Piotrowski's approach by proposing polynomial logistic regression for these cases which can hardly be described by its standard version. Also, we propose to consider individual language change cases jointly, in order to inspect their possible collinearity or, more likely, their different dynamics in the function of time. Last but not least, we evaluate our results by testing the influence of the subcorpus size on the model's goodness-of-fit.
Deep Learning with Long Short-Term Memory for Time Series Prediction
Oct 24, 2018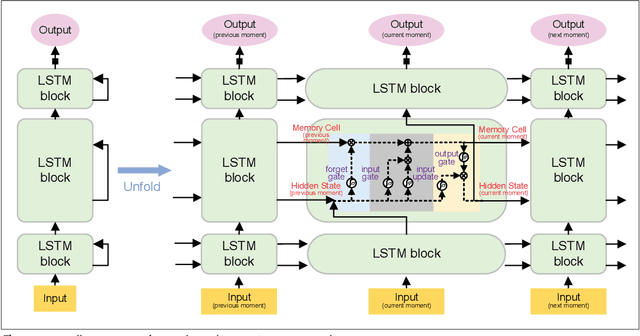
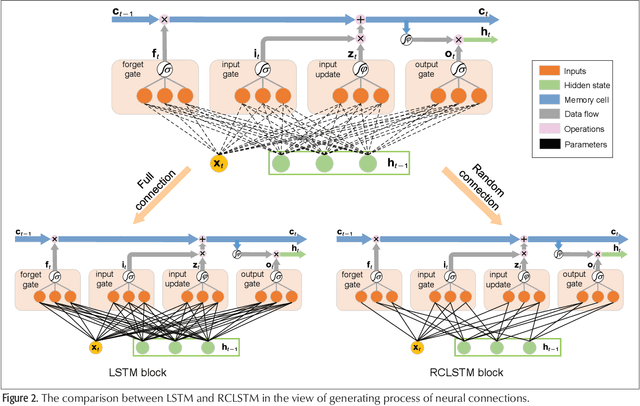
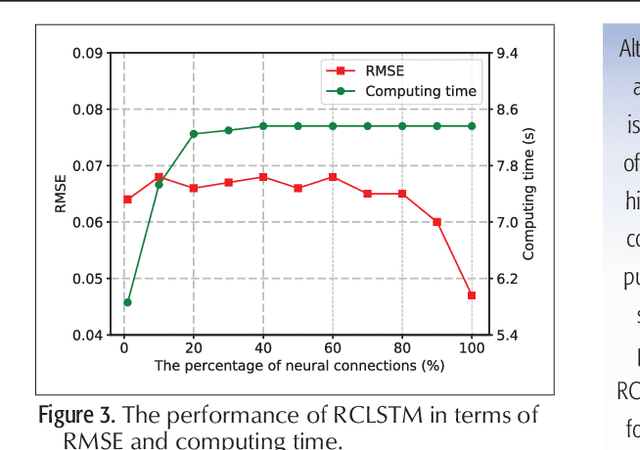
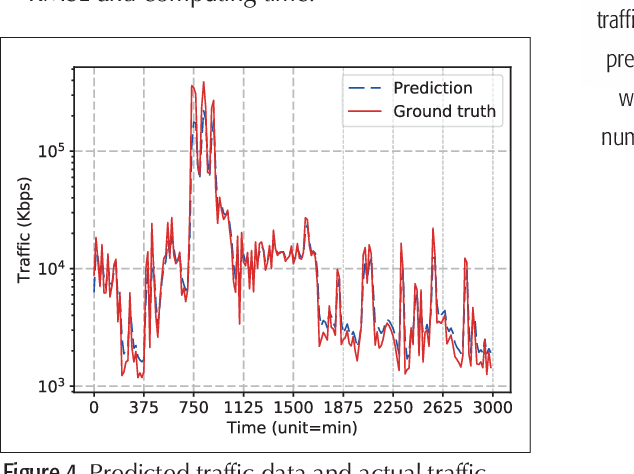
Time series prediction can be generalized as a process that extracts useful information from historical records and then determines future values. Learning long-range dependencies that are embedded in time series is often an obstacle for most algorithms, whereas Long Short-Term Memory (LSTM) solutions, as a specific kind of scheme in deep learning, promise to effectively overcome the problem. In this article, we first give a brief introduction to the structure and forward propagation mechanism of the LSTM model. Then, aiming at reducing the considerable computing cost of LSTM, we put forward the Random Connectivity LSTM (RCLSTM) model and test it by predicting traffic and user mobility in telecommunication networks. Compared to LSTM, RCLSTM is formed via stochastic connectivity between neurons, which achieves a significant breakthrough in the architecture formation of neural networks. In this way, the RCLSTM model exhibits a certain level of sparsity, which leads to an appealing decrease in the computational complexity and makes the RCLSTM model become more applicable in latency-stringent application scenarios. In the field of telecommunication networks, the prediction of traffic series and mobility traces could directly benefit from this improvement as we further demonstrate that the prediction accuracy of RCLSTM is comparable to that of the conventional LSTM no matter how we change the number of training samples or the length of input sequences.
A Unified Framework for Long Range and Cold Start Forecasting of Seasonal Profiles in Time Series
Aug 26, 2018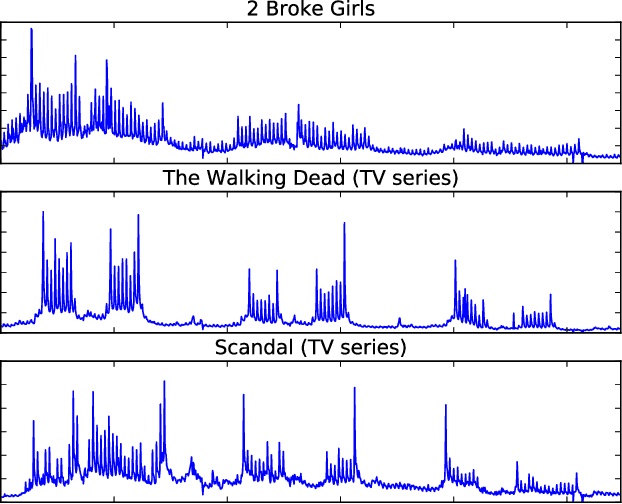
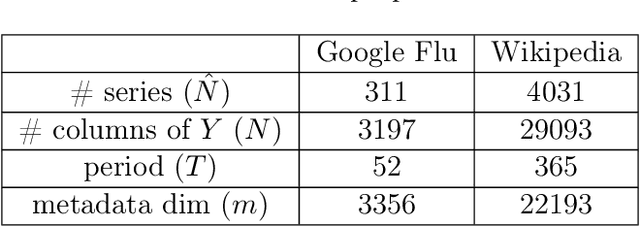
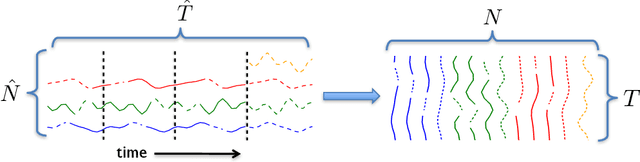
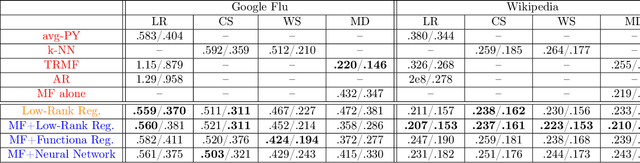
Providing long-range forecasts is a fundamental challenge in time series modeling, which is only compounded by the challenge of having to form such forecasts when a time series has never previously been observed. The latter challenge is the time series version of the cold-start problem seen in recommender systems which, to our knowledge, has not been addressed in previous work. A similar problem occurs when a long range forecast is required after only observing a small number of time points --- a warm start forecast. With these aims in mind, we focus on forecasting seasonal profiles---or baseline demand---for periods on the order of a year in three cases: the long range case with multiple previously observed seasonal profiles, the cold start case with no previous observed seasonal profiles, and the warm start case with only a single partially observed profile. Classical time series approaches that perform iterated step-ahead forecasts based on previous observations struggle to provide accurate long range predictions; in settings with little to no observed data, such approaches are simply not applicable. Instead, we present a straightforward framework which combines ideas from high-dimensional regression and matrix factorization on a carefully constructed data matrix. Key to our formulation and resulting performance is leveraging (1) repeated patterns over fixed periods of time and across series, and (2) metadata associated with the individual series; without this additional data, the cold-start/warm-start problems are nearly impossible to solve. We demonstrate that our framework can accurately forecast an array of seasonal profiles on multiple large scale datasets.
Robust 360-8PA: Redesigning The Normalized 8-point Algorithm for 360-FoV Images
Apr 22, 2021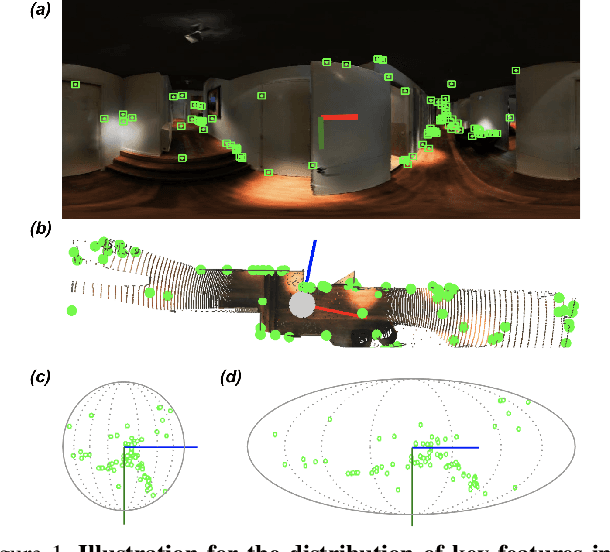
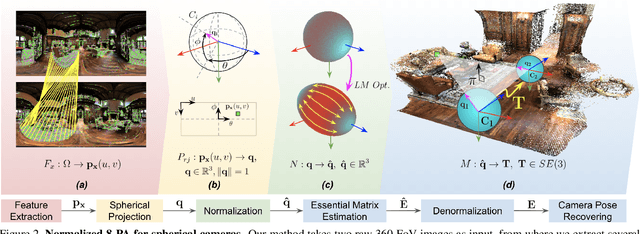
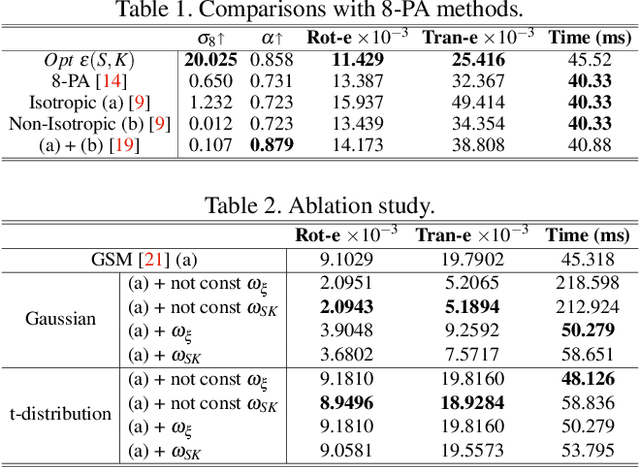
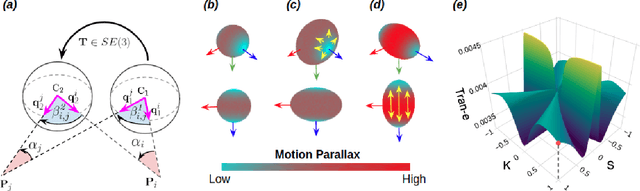
This paper presents a novel preconditioning strategy for the classic 8-point algorithm (8-PA) for estimating an essential matrix from 360-FoV images (i.e., equirectangular images) in spherical projection. To alleviate the effect of uneven key-feature distributions and outlier correspondences, which can potentially decrease the accuracy of an essential matrix, our method optimizes a non-rigid transformation to deform a spherical camera into a new spatial domain, defining a new constraint and a more robust and accurate solution for an essential matrix. Through several experiments using random synthetic points, 360-FoV, and fish-eye images, we demonstrate that our normalization can increase the camera pose accuracy by about 20% without significantly overhead the computation time. In addition, we present further benefits of our method through both a constant weighted least-square optimization that improves further the well known Gold Standard Method (GSM) (i.e., the non-linear optimization by using epipolar errors); and a relaxation of the number of RANSAC iterations, both showing that our normalization outcomes a more reliable, robust, and accurate solution.
End-Effector Stabilization of a 10-DOF Mobile Manipulator using Nonlinear Model Predictive Control
Mar 24, 2021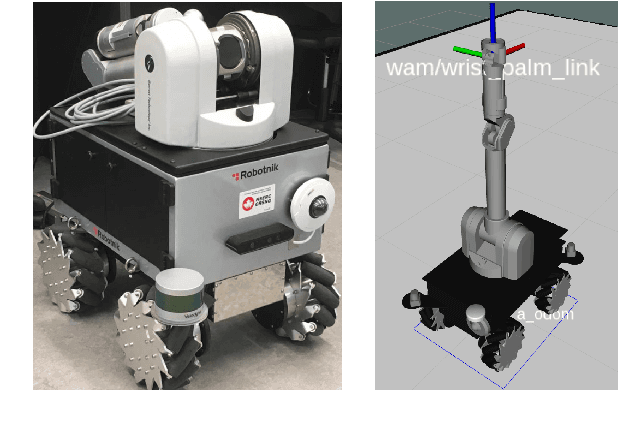
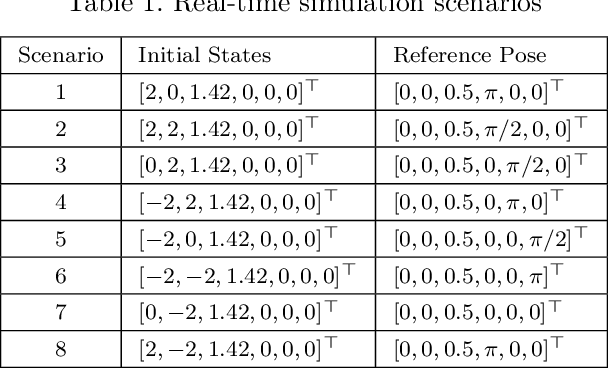
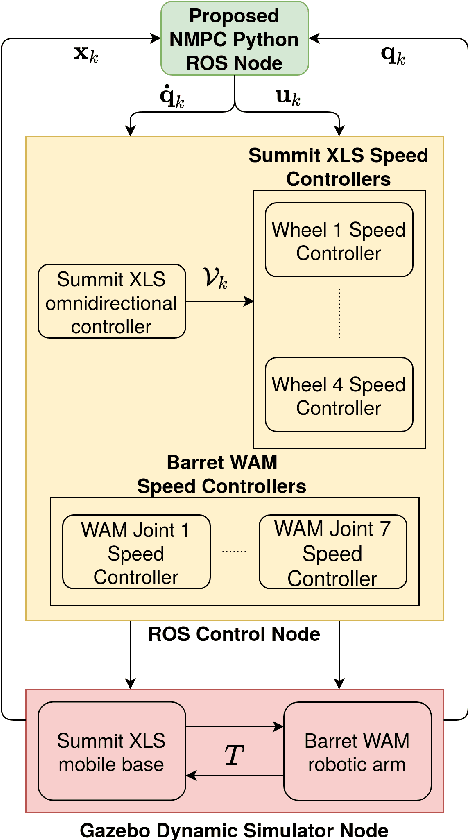
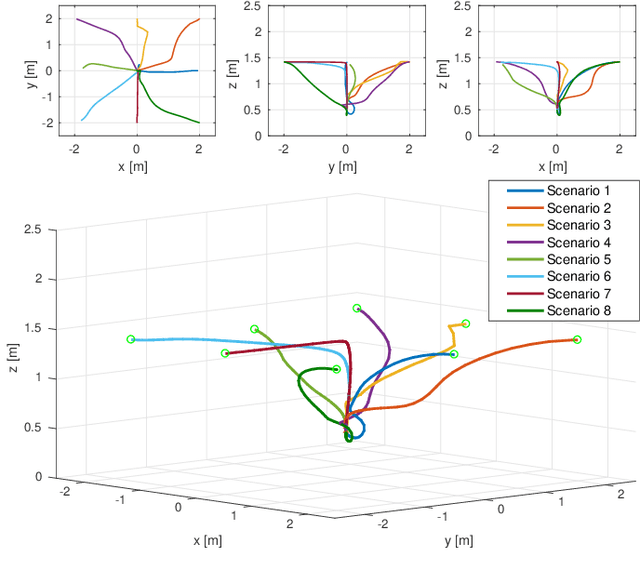
Motion control of mobile manipulators (a robotic arm mounted on a mobile base) can be challenging for complex tasks such as material and package handling. In this paper, a task-space stabilization controller based on Nonlinear Model Predictive Control (NMPC) is designed and implemented to a 10 Degrees of Freedom (DOF) mobile manipulator which consists of a 7-DOF robotic arm and a 3-DOF mobile base. The system model is based on kinematic models where the end-effector orientation is parameterized directly by a rotation matrix. The state and control constraints as well as singularity constraints are explicitly included in the NMPC formulation. The controller is tested using real-time simulations, which demonstrate high positioning accuracy with tractable computational cost.
Efficient LiDAR Odometry for Autonomous Driving
Apr 22, 2021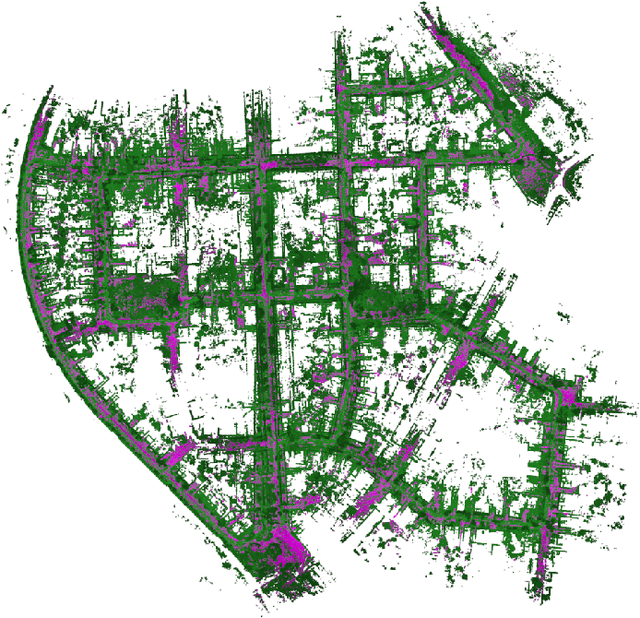
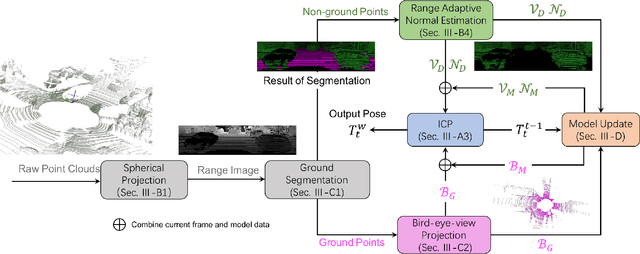
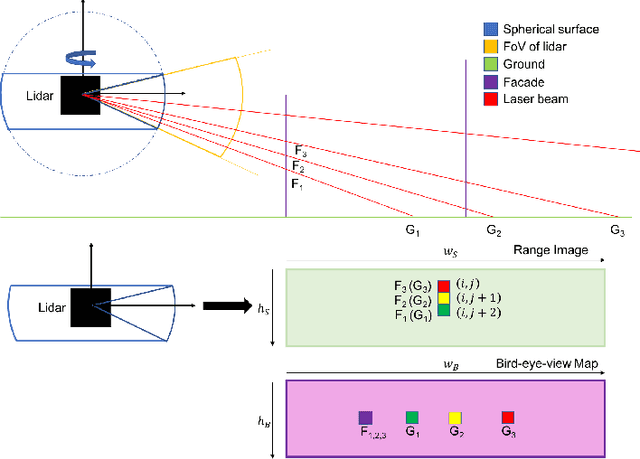
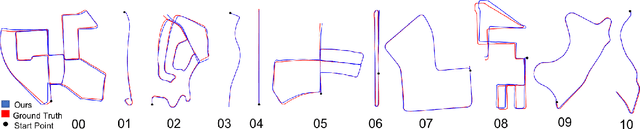
LiDAR odometry plays an important role in self-localization and mapping for autonomous navigation, which is usually treated as a scan registration problem. Although having achieved promising performance on KITTI odometry benchmark, the conventional searching tree-based approach still has the difficulty in dealing with the large scale point cloud efficiently. The recent spherical range image-based method enjoys the merits of fast nearest neighbor search by spherical mapping. However, it is not very effective to deal with the ground points nearly parallel to LiDAR beams. To address these issues, we propose a novel efficient LiDAR odometry approach by taking advantage of both non-ground spherical range image and bird's-eye-view map for ground points. Moreover, a range adaptive method is introduced to robustly estimate the local surface normal. Additionally, a very fast and memory-efficient model update scheme is proposed to fuse the points and their corresponding normals at different time-stamps. We have conducted extensive experiments on KITTI odometry benchmark, whose promising results demonstrate that our proposed approach is effective.
PHI-MVS: Plane Hypothesis Inference Multi-view Stereo for Large-Scale Scene Reconstruction
Apr 13, 2021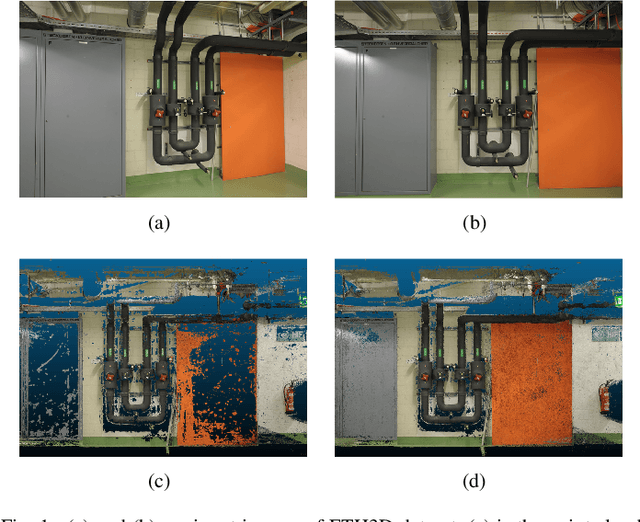
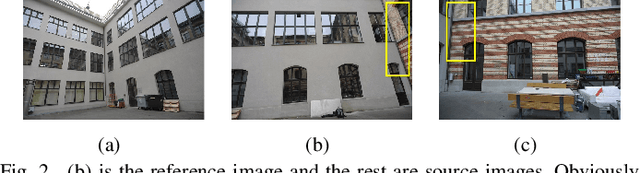
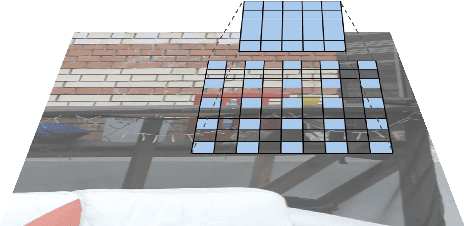
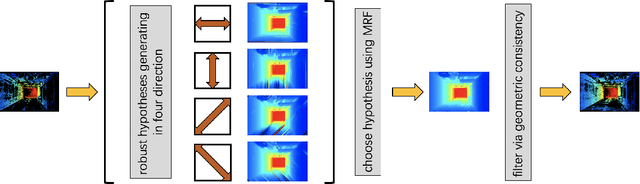
PatchMatch based Multi-view Stereo (MVS) algorithms have achieved great success in large-scale scene reconstruction tasks. However, reconstruction of texture-less planes often fails as similarity measurement methods may become ineffective on these regions. Thus, a new plane hypothesis inference strategy is proposed to handle the above issue. The procedure consists of two steps: First, multiple plane hypotheses are generated using filtered initial depth maps on regions that are not successfully recovered; Second, depth hypotheses are selected using Markov Random Field (MRF). The strategy can significantly improve the completeness of reconstruction results with only acceptable computing time increasing. Besides, a new acceleration scheme similar to dilated convolution can speed up the depth map estimating process with only a slight influence on the reconstruction. We integrated the above ideas into a new MVS pipeline, Plane Hypothesis Inference Multi-view Stereo (PHI-MVS). The result of PHI-MVS is validated on ETH3D public benchmarks, and it demonstrates competing performance against the state-of-the-art.
An Extension of BIM Using AI: a Multi Working-Machines Pathfinding Solution
May 14, 2021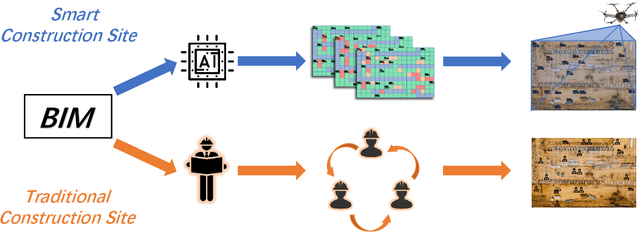
Multi working-machines pathfinding solution enables more mobile machines simultaneously to work inside of a working site so that the productivity can be expected to increase evolutionary. To date, the potential cooperation conflicts among construction machinery limit the amount of construction machinery investment in a concrete working site. To solve the cooperation problem, civil engineers optimize the working site from a logistic perspective while computer scientists improve pathfinding algorithms' performance on the given benchmark maps. In the practical implementation of a construction site, it is sensible to solve the problem with a hybrid solution; therefore, in our study, we proposed an algorithm based on a cutting-edge multi-pathfinding algorithm to enable the massive number of machines cooperation and offer the advice to modify the unreasonable part of the working site in the meantime. Using the logistic information from BIM, such as unloading and loading point, we added a pathfinding solution for multi machines to improve the whole construction fleet's productivity. In the previous study, the experiments were limited to no more than ten participants, and the computational time to gather the solution was not given; thus, we publish our pseudo-code, our tested map, and benchmark our results. Our algorithm's most extensive feature is that it can quickly replan the path to overcome the emergency on a construction site.
Machine learning for nocturnal diagnosis of chronic obstructive pulmonary disease using digital oximetry biomarkers
Dec 10, 2020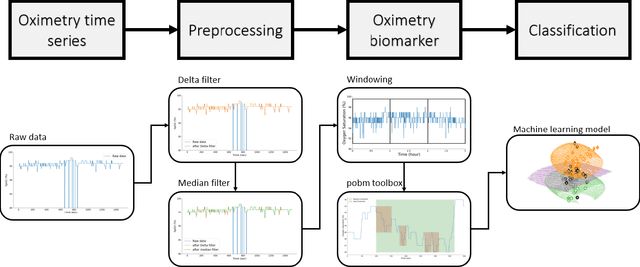
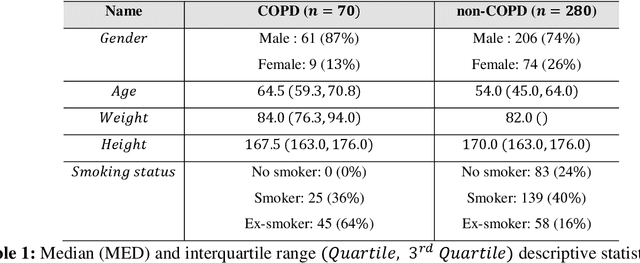
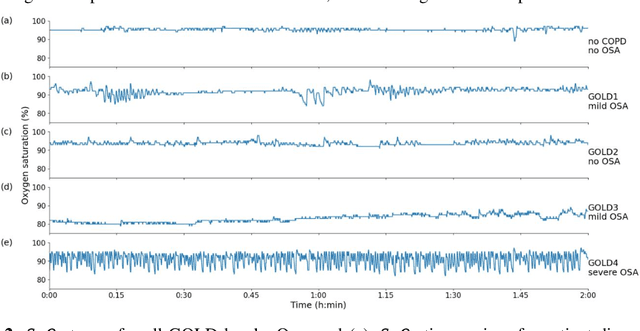
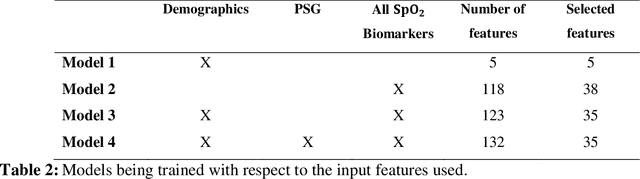
Objective: Chronic obstructive pulmonary disease (COPD) is a highly prevalent chronic condition. COPD is a major source of morbidity, mortality and healthcare costs. Spirometry is the gold standard test for a definitive diagnosis and severity grading of COPD. However, a large proportion of individuals with COPD are undiagnosed and untreated. Given the high prevalence of COPD and its clinical importance, it is critical to develop new algorithms to identify undiagnosed COPD, especially in specific groups at risk, such as those with sleep disorder breathing. To our knowledge, no research has looked at the feasibility of COPD diagnosis from the nocturnal oximetry time series. Approach: We hypothesize that patients with COPD will exert certain patterns and/or dynamics of their overnight oximetry time series that are unique to this condition. We introduce a novel approach to nocturnal COPD diagnosis using 44 oximetry digital biomarkers and 5 demographic features and assess its performance in a population sample at risk of sleep-disordered breathing. A total of n=350 unique patients polysomnography (PSG) recordings. A random forest (RF) classifier is trained using these features and evaluated using the nested cross-validation procedure. Significance: Our research makes a number of novel scientific contributions. First, we demonstrated for the first time, the feasibility of COPD diagnosis from nocturnal oximetry time series in a population sample at risk of sleep disordered breathing. We highlighted what digital oximetry biomarkers best reflect how COPD manifests overnight. The results motivate that overnight single channel oximetry is a valuable pathway for COPD diagnosis.