 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Managing Temporal Resolution in Continuous Value Estimation: A Fundamental Trade-off
Dec 17, 2022
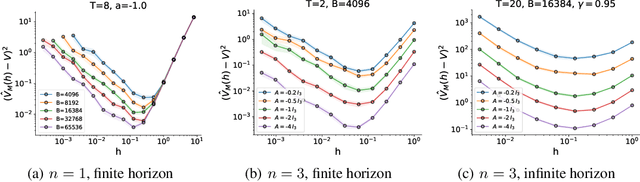

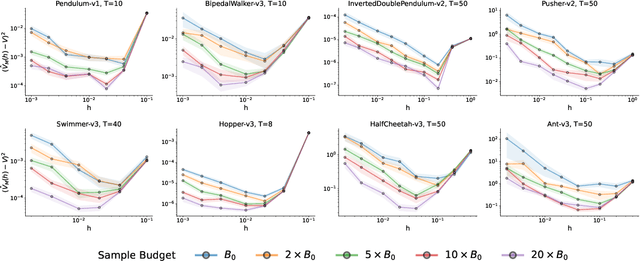
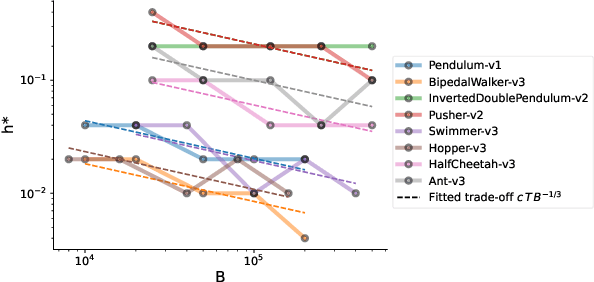
A default assumption in reinforcement learning and optimal control is that experience arrives at discrete time points on a fixed clock cycle. Many applications, however, involve continuous systems where the time discretization is not fixed but instead can be managed by a learning algorithm. By analyzing Monte-Carlo value estimation for LQR systems in both finite-horizon and infinite-horizon settings, we uncover a fundamental trade-off between approximation and statistical error in value estimation. Importantly, these two errors behave differently with respect to time discretization, which implies that there is an optimal choice for the temporal resolution that depends on the data budget. These findings show how adapting the temporal resolution can provably improve value estimation quality in LQR systems from finite data. Empirically, we demonstrate the trade-off in numerical simulations of LQR instances and several non-linear environments.
Smart tutor to provide feedback in programming courses
Jan 24, 2023
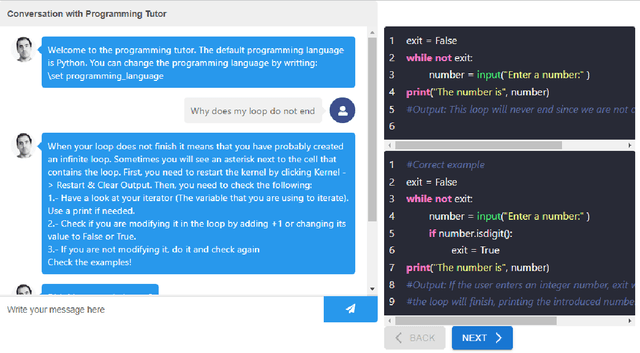
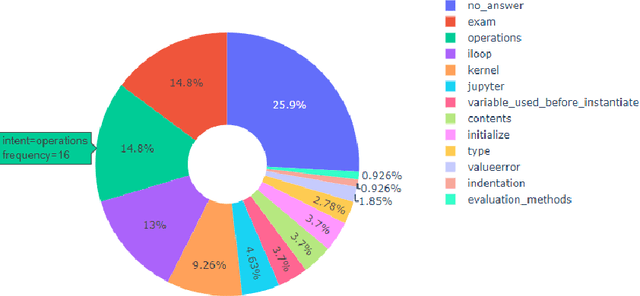
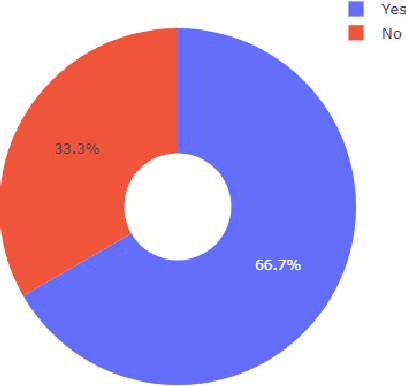
Artificial Intelligence (AI) is becoming more and more popular as time passes, allowing to perform tasks that were difficult to do in the past. From predictions to customization, AI is being used in many areas, not being educational environments outside this situation. AI is being used in educational settings to customize contents or to provide personalized feedback to the students, among others. In this scenario, AI in programming teaching is something that still has to be explored, since in this area we usually find assessment tools that allow grading the students work, but we can not find many tools aimed towards providing feedback to the students in the process of creating their program. In this work we present an AI based intelligent tutor that answers students programming questions. The tool has been tested by university students at the URJC along a whole course. Even if the tool is still in its preliminary phase, it helped the students with their questions, providing accurate answers and examples. The students were able to use the intelligent tutor easily and they thought that it could be a useful tool to use in other courses.
Off-Policy Evaluation for Action-Dependent Non-Stationary Environments
Jan 24, 2023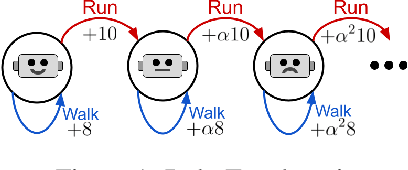
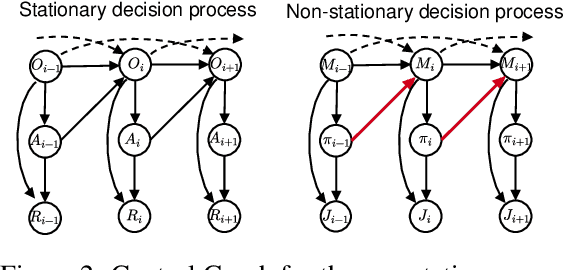
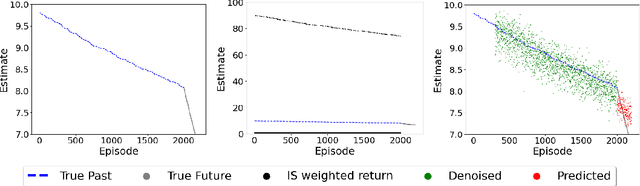
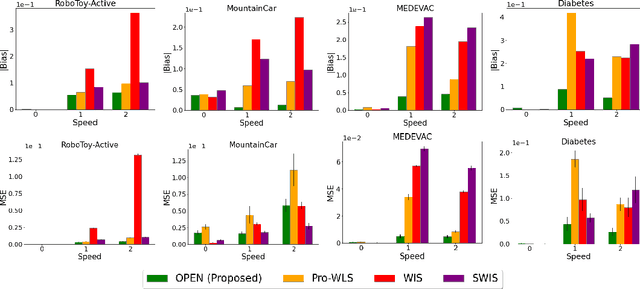
Methods for sequential decision-making are often built upon a foundational assumption that the underlying decision process is stationary. This limits the application of such methods because real-world problems are often subject to changes due to external factors (passive non-stationarity), changes induced by interactions with the system itself (active non-stationarity), or both (hybrid non-stationarity). In this work, we take the first steps towards the fundamental challenge of on-policy and off-policy evaluation amidst structured changes due to active, passive, or hybrid non-stationarity. Towards this goal, we make a higher-order stationarity assumption such that non-stationarity results in changes over time, but the way changes happen is fixed. We propose, OPEN, an algorithm that uses a double application of counterfactual reasoning and a novel importance-weighted instrument-variable regression to obtain both a lower bias and a lower variance estimate of the structure in the changes of a policy's past performances. Finally, we show promising results on how OPEN can be used to predict future performances for several domains inspired by real-world applications that exhibit non-stationarity.
AccDecoder: Accelerated Decoding for Neural-enhanced Video Analytics
Jan 24, 2023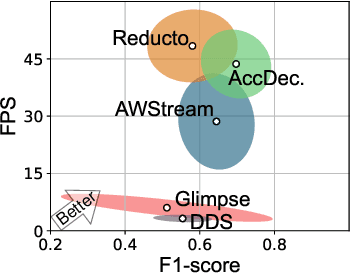
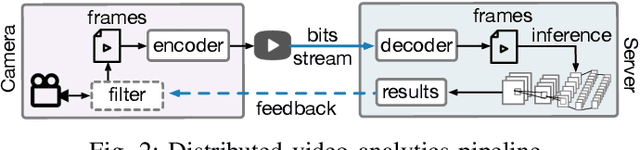
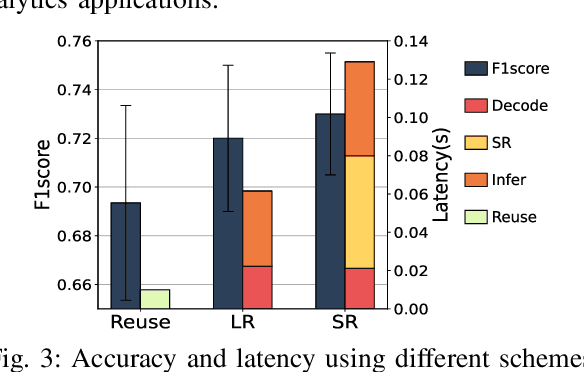
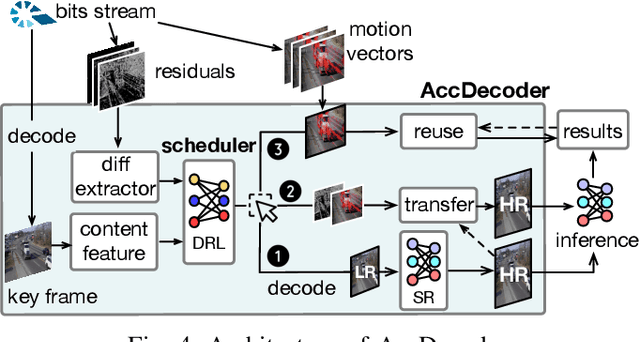
The quality of the video stream is key to neural network-based video analytics. However, low-quality video is inevitably collected by existing surveillance systems because of poor quality cameras or over-compressed/pruned video streaming protocols, e.g., as a result of upstream bandwidth limit. To address this issue, existing studies use quality enhancers (e.g., neural super-resolution) to improve the quality of videos (e.g., resolution) and eventually ensure inference accuracy. Nevertheless, directly applying quality enhancers does not work in practice because it will introduce unacceptable latency. In this paper, we present AccDecoder, a novel accelerated decoder for real-time and neural-enhanced video analytics. AccDecoder can select a few frames adaptively via Deep Reinforcement Learning (DRL) to enhance the quality by neural super-resolution and then up-scale the unselected frames that reference them, which leads to 6-21% accuracy improvement. AccDecoder provides efficient inference capability via filtering important frames using DRL for DNN-based inference and reusing the results for the other frames via extracting the reference relationship among frames and blocks, which results in a latency reduction of 20-80% than baselines.
Low-Resource Compositional Semantic Parsing with Concept Pretraining
Jan 24, 2023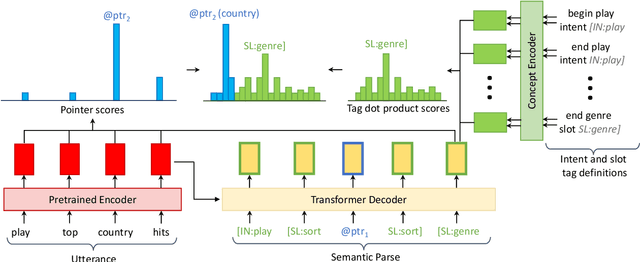

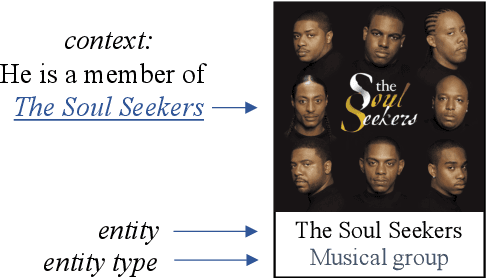
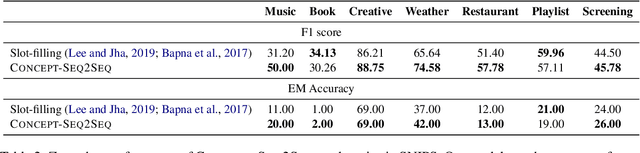
Semantic parsing plays a key role in digital voice assistants such as Alexa, Siri, and Google Assistant by mapping natural language to structured meaning representations. When we want to improve the capabilities of a voice assistant by adding a new domain, the underlying semantic parsing model needs to be retrained using thousands of annotated examples from the new domain, which is time-consuming and expensive. In this work, we present an architecture to perform such domain adaptation automatically, with only a small amount of metadata about the new domain and without any new training data (zero-shot) or with very few examples (few-shot). We use a base seq2seq (sequence-to-sequence) architecture and augment it with a concept encoder that encodes intent and slot tags from the new domain. We also introduce a novel decoder-focused approach to pretrain seq2seq models to be concept aware using Wikidata and use it to help our model learn important concepts and perform well in low-resource settings. We report few-shot and zero-shot results for compositional semantic parsing on the TOPv2 dataset and show that our model outperforms prior approaches in few-shot settings for the TOPv2 and SNIPS datasets.
A Comparison between RSMA, SDMA, and OMA in Multibeam LEO Satellite Systems
Jan 24, 2023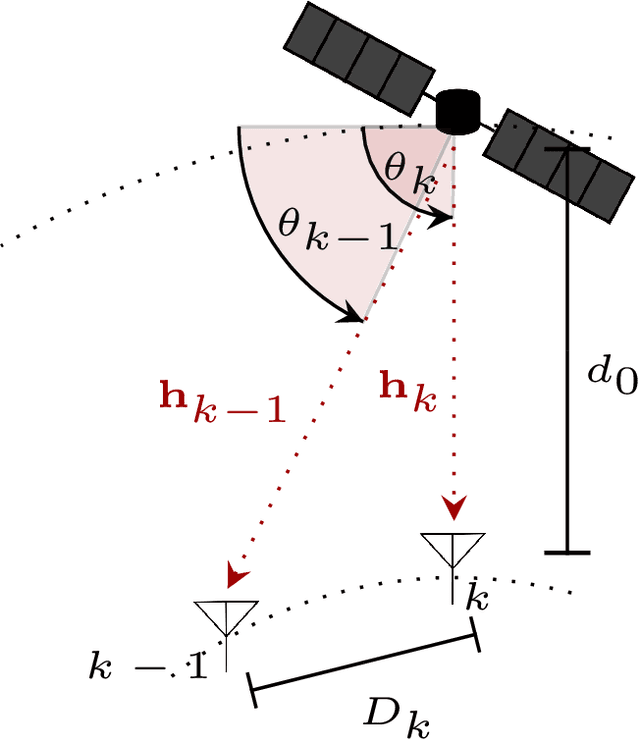
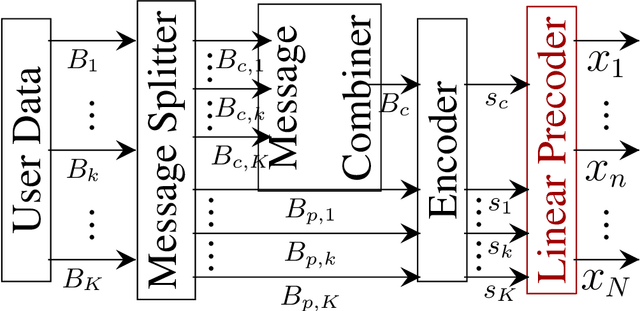
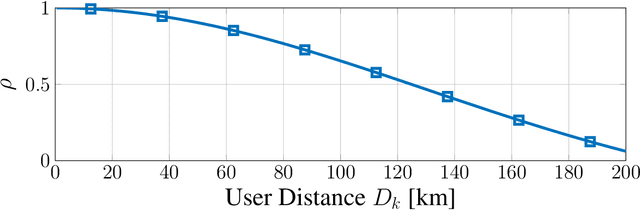
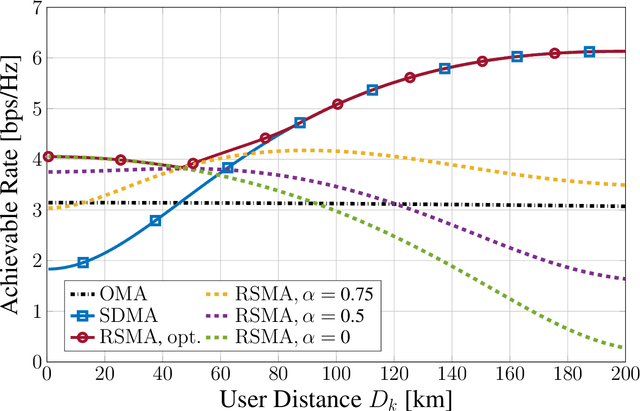
Low Earth orbit (LEO) satellite systems enable close to global coverage and are therefore expected to become important pillars of future communication standards. However, a particular challenge faced by LEO satellites is the high orbital velocities due to which a precise channel estimation is difficult. We model this influence as an erroneous angle of departure (AoD), which corresponds to imperfect channel state information (CSI) at the transmitter (CSIT). Poor CSIT and non-orthogonal user channels degrade the performance of space-division multiple access (SDMA) precoding by increasing inter-user interference (IUI). In contrast to SDMA, there is no IUI in orthogonal multiple access (OMA), but it requires orthogonal time or frequency resources for each user. Rate-splitting multiple access (RSMA), unifying SDMA, OMA, and non-orthogonal multiple access (NOMA), has recently been proven to be a flexible approach for robust interference management considering imperfect CSIT. In this paper, we investigate RSMA as a promising strategy to manage IUI in LEO satellite downlink systems caused by non-orthogonal user channels as well as imperfect CSIT. We evaluate the optimal configuration of RSMA depending on the geometrical constellation between the satellite and users.
Parallel Approaches to Accelerate Bayesian Decision Trees
Jan 22, 2023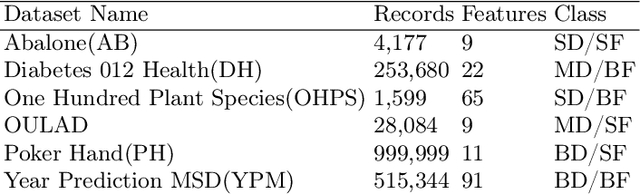
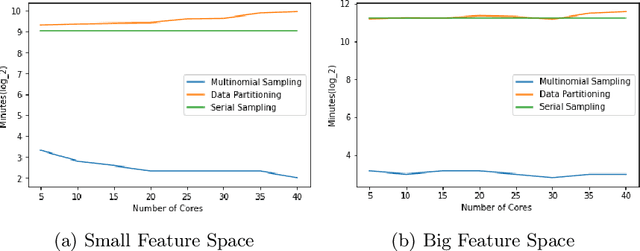
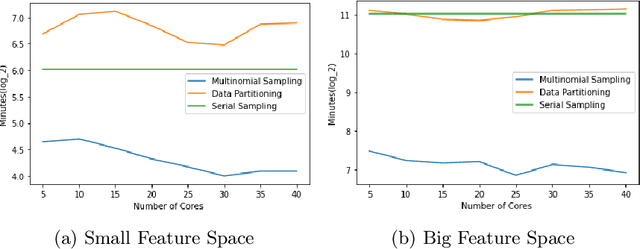
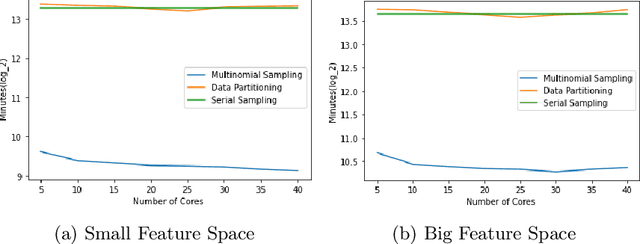
Markov Chain Monte Carlo (MCMC) is a well-established family of algorithms primarily used in Bayesian statistics to sample from a target distribution when direct sampling is challenging. Existing work on Bayesian decision trees uses MCMC. Unfortunately, this can be slow, especially when considering large volumes of data. It is hard to parallelise the accept-reject component of the MCMC. None-the-less, we propose two methods for exploiting parallelism in the MCMC: in the first, we replace the MCMC with another numerical Bayesian approach, the Sequential Monte Carlo (SMC) sampler, which has the appealing property that it is an inherently parallel algorithm; in the second, we consider data partitioning. Both methods use multi-core processing with a HighPerformance Computing (HPC) resource. We test the two methods in various study settings to determine which method is the most beneficial for each test case. Experiments show that data partitioning has limited utility in the settings we consider and that the use of the SMC sampler can improve run-time (compared to the sequential implementation) by up to a factor of 343.
Improving Autonomous Vehicle Mapping and Navigation in Work Zones Using Crowdsourcing Vehicle Trajectories
Jan 22, 2023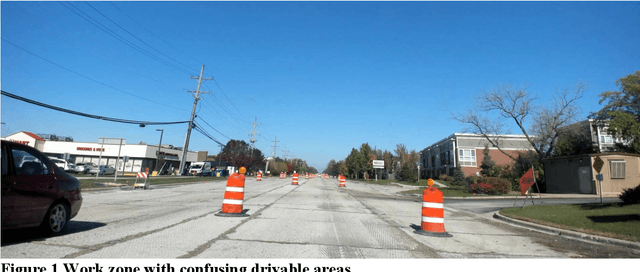
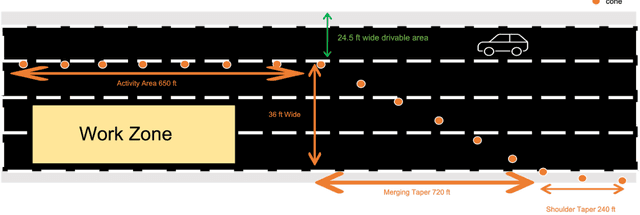
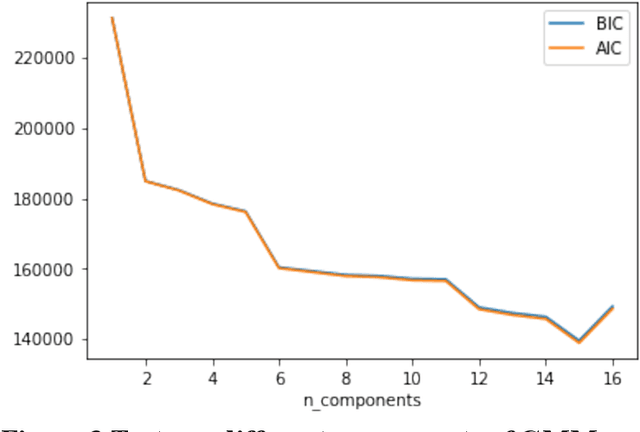

Prevalent solutions for Connected and Autonomous vehicle (CAV) mapping include high definition map (HD map) or real-time Simultaneous Localization and Mapping (SLAM). Both methods only rely on vehicle itself (onboard sensors or embedded maps) and can not adapt well to temporarily changed drivable areas such as work zones. Navigating CAVs in such areas heavily relies on how the vehicle defines drivable areas based on perception information. Difficulties in improving perception accuracy and ensuring the correct interpretation of perception results are challenging to the vehicle in these situations. This paper presents a prototype that introduces crowdsourcing trajectories information into the mapping process to enhance CAV's understanding on the drivable area and traffic rules. A Gaussian Mixture Model (GMM) is applied to construct the temporarily changed drivable area and occupancy grid map (OGM) based on crowdsourcing trajectories. The proposed method is compared with SLAM without any human driving information. Our method has adapted well with the downstream path planning and vehicle control module, and the CAV did not violate driving rule, which a pure SLAM method did not achieve.
Bug Fix Time Optimization Using Matrix Factorization and Iterative Gale-Shaply Algorithms
Jul 14, 2022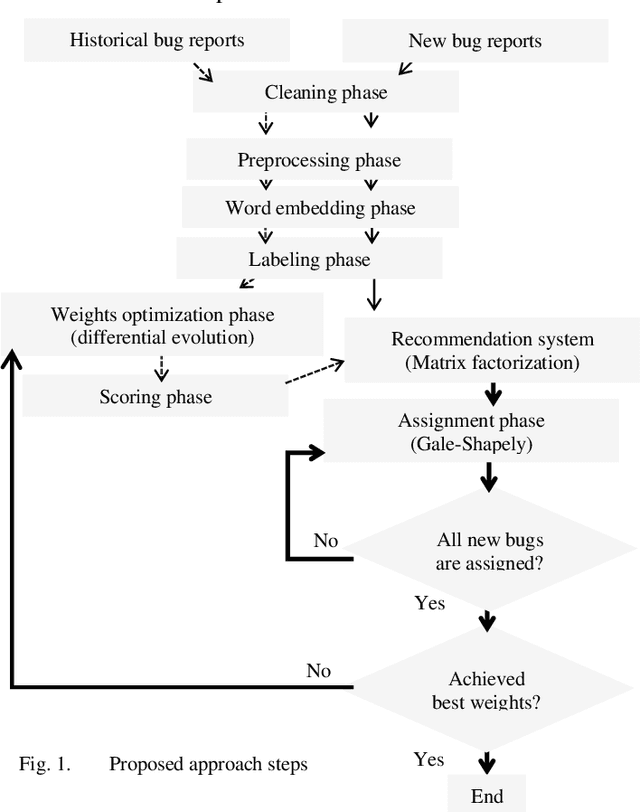
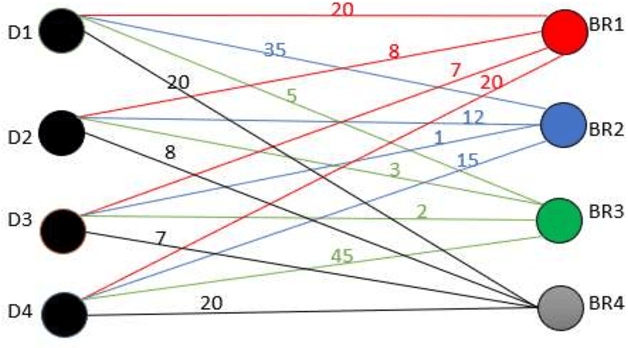
Bug triage is an essential task in software maintenance phase. It assigns developers (fixers) to bug reports to fix them. This process is performed manually by a triager, who analyzes developers profiles and submitted bug reports to make suitable assignments. Bug triaging process is time consuming thus automating this process is essential to improve the quality of software. Previous work addressed triaging problem either as an information retrieval or classification problem. This paper tackles this problem as a resource allocation problem, that aims at the best assignments of developers to bug reports, that reduces the total fixing time of the newly submitted bug reports, in addition to the even distribution of bug reports over developers. In this paper, a combination of matrix factorization and Gale Shapely algorithm, supported by the differential evolution is firstly introduced to optimize the total fix time and normalize developers work load. Matrix factorization is used to establish a recommendation system for Gale-Shapley to make assignment decisions. Differential evolution provides the best set of weights to build developers score profiles. The proposed approach is assessed over three repositories, Linux, Apache and Eclipse. Experimental results show that the proposed approach reduces the bug fixing time, in comparison to the manual triage, by 80.67%, 23.61% and 60.22% over Linux, Eclipse and Apache respectively. Moreover, the workload for the developers is uniform.
MB-DECTNet: A Model-Based Unrolled Network for Accurate 3D DECT Reconstruction
Feb 01, 2023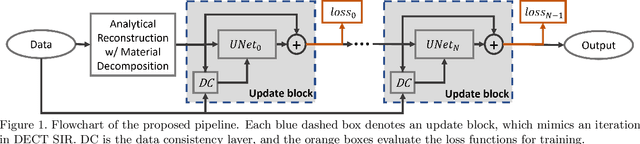
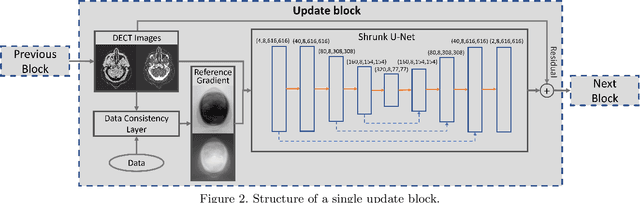
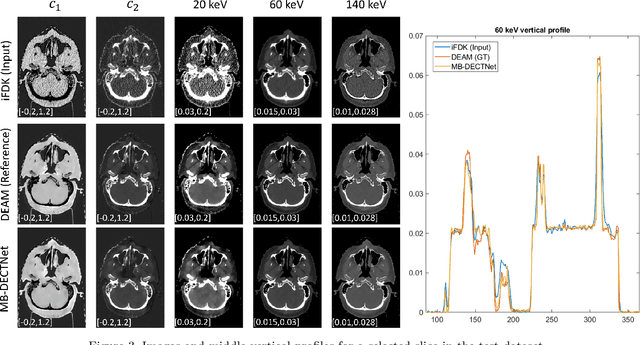
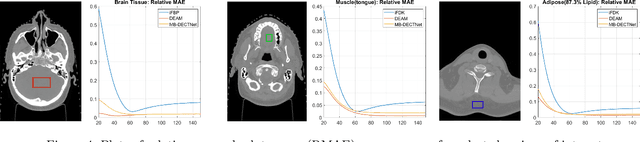
Numerous dual-energy CT (DECT) techniques have been developed in the past few decades. Dual-energy CT (DECT) statistical iterative reconstruction (SIR) has demonstrated its potential for reducing noise and increasing accuracy. Our lab proposed a joint statistical DECT algorithm for stopping power estimation and showed that it outperforms competing image-based material-decomposition methods. However, due to its slow convergence and the high computational cost of projections, the elapsed time of 3D DECT SIR is often not clinically acceptable. Therefore, to improve its convergence, we have embedded DECT SIR into a deep learning model-based unrolled network for 3D DECT reconstruction (MB-DECTNet) that can be trained in an end-to-end fashion. This deep learning-based method is trained to learn the shortcuts between the initial conditions and the stationary points of iterative algorithms while preserving the unbiased estimation property of model-based algorithms. MB-DECTNet is formed by stacking multiple update blocks, each of which consists of a data consistency layer (DC) and a spatial mixer layer, where the spatial mixer layer is the shrunken U-Net, and the DC layer is a one-step update of an arbitrary traditional iterative method. Although the proposed network can be combined with numerous iterative DECT algorithms, we demonstrate its performance with the dual-energy alternating minimization (DEAM). The qualitative result shows that MB-DECTNet with DEAM significantly reduces noise while increasing the resolution of the test image. The quantitative result shows that MB-DECTNet has the potential to estimate attenuation coefficients accurately as traditional statistical algorithms but with a much lower computational cost.