 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Digital Twin-assisted Reinforcement Learning for Resource-aware Microservice Offloading in Edge Computing
Mar 13, 2024
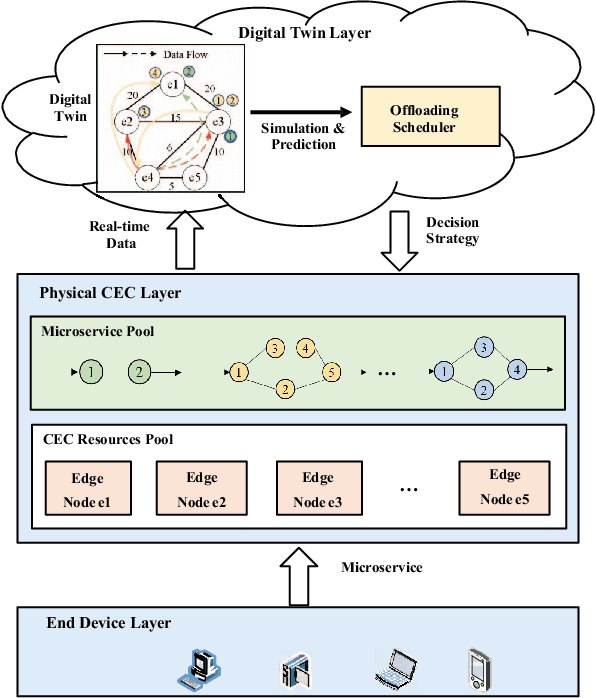
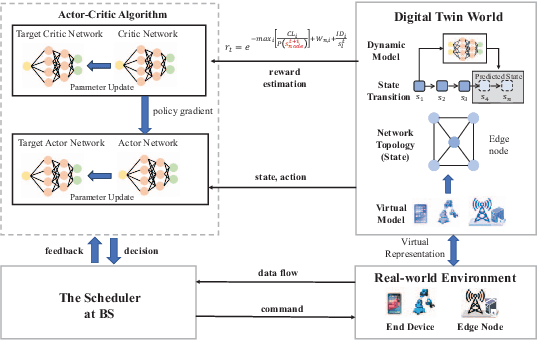
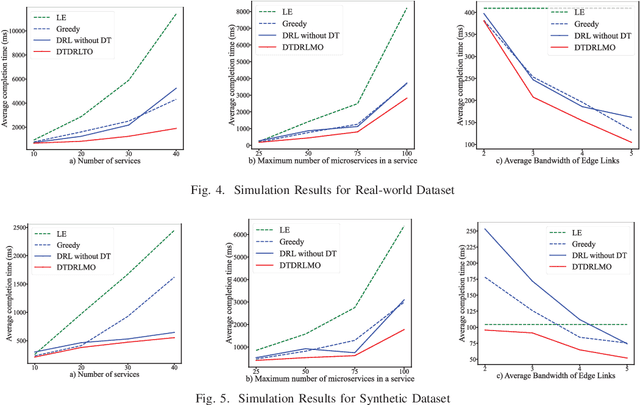
Collaborative edge computing (CEC) has emerged as a promising paradigm, enabling edge nodes to collaborate and execute microservices from end devices. Microservice offloading, a fundamentally important problem, decides when and where microservices are executed upon the arrival of services. However, the dynamic nature of the real-world CEC environment often leads to inefficient microservice offloading strategies, resulting in underutilized resources and network congestion. To address this challenge, we formulate an online joint microservice offloading and bandwidth allocation problem, JMOBA, to minimize the average completion time of services. In this paper, we introduce a novel microservice offloading algorithm, DTDRLMO, which leverages deep reinforcement learning (DRL) and digital twin technology. Specifically, we employ digital twin techniques to predict and adapt to changing edge node loads and network conditions of CEC in real-time. Furthermore, this approach enables the generation of an efficient offloading plan, selecting the most suitable edge node for each microservice. Simulation results on real-world and synthetic datasets demonstrate that DTDRLMO outperforms heuristic and learning-based methods in average service completion time.
* 9 pages, 5 figures
TRELM: Towards Robust and Efficient Pre-training for Knowledge-Enhanced Language Models
Mar 17, 2024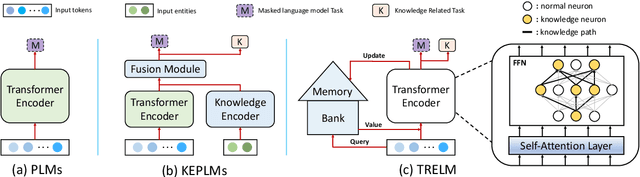

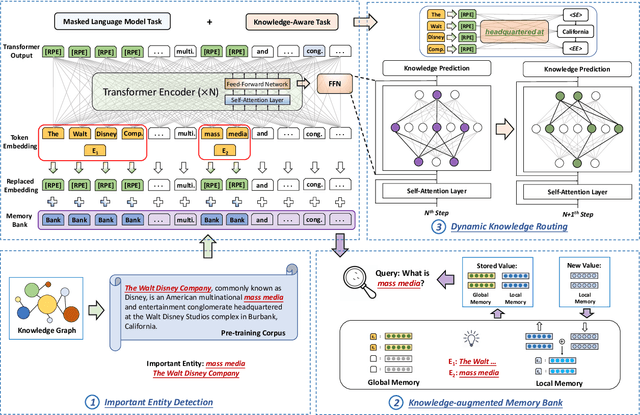
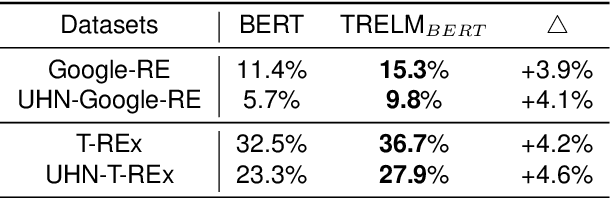
KEPLMs are pre-trained models that utilize external knowledge to enhance language understanding. Previous language models facilitated knowledge acquisition by incorporating knowledge-related pre-training tasks learned from relation triples in knowledge graphs. However, these models do not prioritize learning embeddings for entity-related tokens. Moreover, updating the entire set of parameters in KEPLMs is computationally demanding. This paper introduces TRELM, a Robust and Efficient Pre-training framework for Knowledge-Enhanced Language Models. We observe that entities in text corpora usually follow the long-tail distribution, where the representations of some entities are suboptimally optimized and hinder the pre-training process for KEPLMs. To tackle this, we employ a robust approach to inject knowledge triples and employ a knowledge-augmented memory bank to capture valuable information. Furthermore, updating a small subset of neurons in the feed-forward networks (FFNs) that store factual knowledge is both sufficient and efficient. Specifically, we utilize dynamic knowledge routing to identify knowledge paths in FFNs and selectively update parameters during pre-training. Experimental results show that TRELM reduces pre-training time by at least 50% and outperforms other KEPLMs in knowledge probing tasks and multiple knowledge-aware language understanding tasks.
Deep Coupling Network For Multivariate Time Series Forecasting
Feb 23, 2024Multivariate time series (MTS) forecasting is crucial in many real-world applications. To achieve accurate MTS forecasting, it is essential to simultaneously consider both intra- and inter-series relationships among time series data. However, previous work has typically modeled intra- and inter-series relationships separately and has disregarded multi-order interactions present within and between time series data, which can seriously degrade forecasting accuracy. In this paper, we reexamine intra- and inter-series relationships from the perspective of mutual information and accordingly construct a comprehensive relationship learning mechanism tailored to simultaneously capture the intricate multi-order intra- and inter-series couplings. Based on the mechanism, we propose a novel deep coupling network for MTS forecasting, named DeepCN, which consists of a coupling mechanism dedicated to explicitly exploring the multi-order intra- and inter-series relationships among time series data concurrently, a coupled variable representation module aimed at encoding diverse variable patterns, and an inference module facilitating predictions through one forward step. Extensive experiments conducted on seven real-world datasets demonstrate that our proposed DeepCN achieves superior performance compared with the state-of-the-art baselines.
Leveraging Foundation Model Automatic Data Augmentation Strategies and Skeletal Points for Hands Action Recognition in Industrial Assembly Lines
Mar 14, 2024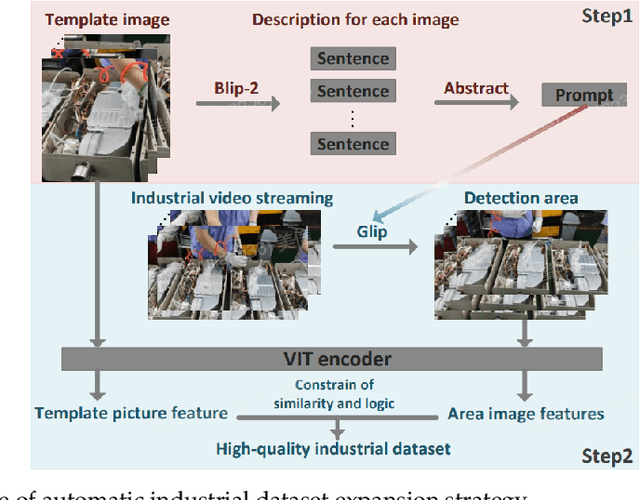
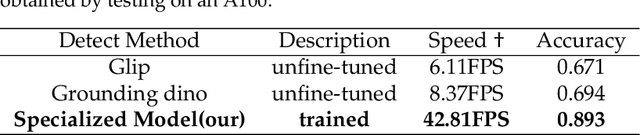
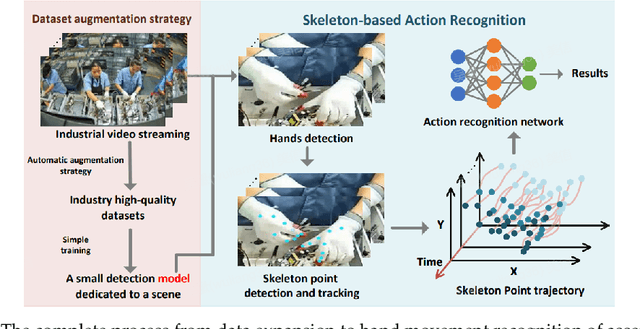

On modern industrial assembly lines, many intelligent algorithms have been developed to replace or supervise workers. However, we found that there were bottlenecks in both training datasets and real-time performance when deploying algorithms on actual assembly line. Therefore, we developed a promising strategy for expanding industrial datasets, which utilized large models with strong generalization abilities to achieve efficient, high-quality, and large-scale dataset expansion, solving the problem of insufficient and low-quality industrial datasets. We also applied this strategy to video action recognition. We proposed a method of converting hand action recognition problems into hand skeletal trajectory classification problems, which solved the real-time performance problem of industrial algorithms. In the "hand movements during wire insertion" scenarios on the actual assembly line, the accuracy of hand action recognition reached 98.8\%. We conducted detailed experimental analysis to demonstrate the effectiveness and superiority of the method, and deployed the entire process on Midea's actual assembly line.
Learning from straggler clients in federated learning
Mar 14, 2024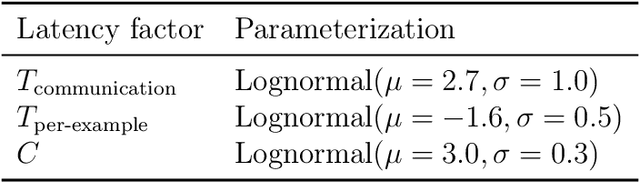
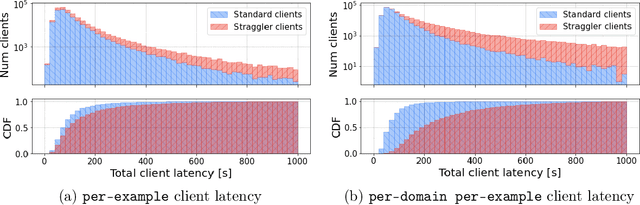
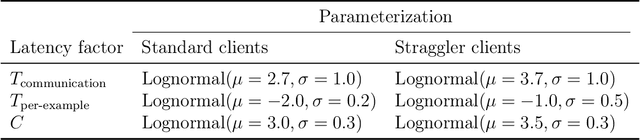
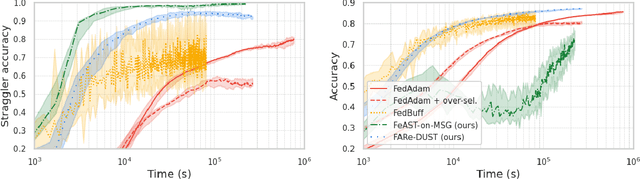
How well do existing federated learning algorithms learn from client devices that return model updates with a significant time delay? Is it even possible to learn effectively from clients that report back minutes, hours, or days after being scheduled? We answer these questions by developing Monte Carlo simulations of client latency that are guided by real-world applications. We study synchronous optimization algorithms like FedAvg and FedAdam as well as the asynchronous FedBuff algorithm, and observe that all these existing approaches struggle to learn from severely delayed clients. To improve upon this situation, we experiment with modifications, including distillation regularization and exponential moving averages of model weights. Finally, we introduce two new algorithms, FARe-DUST and FeAST-on-MSG, based on distillation and averaging, respectively. Experiments with the EMNIST, CIFAR-100, and StackOverflow benchmark federated learning tasks demonstrate that our new algorithms outperform existing ones in terms of accuracy for straggler clients, while also providing better trade-offs between training time and total accuracy.
Predicting Generalization of AI Colonoscopy Models to Unseen Data
Mar 18, 2024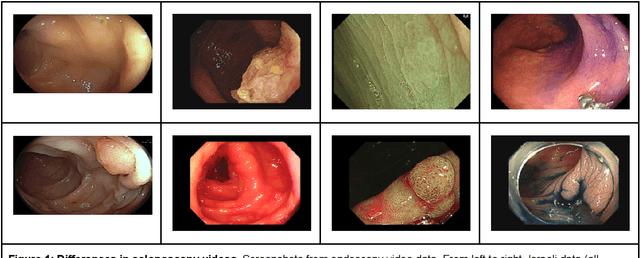
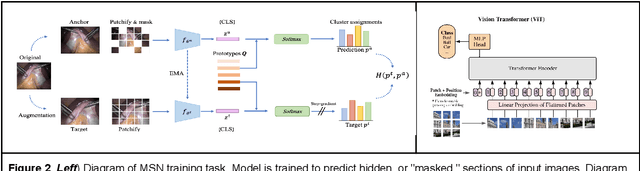
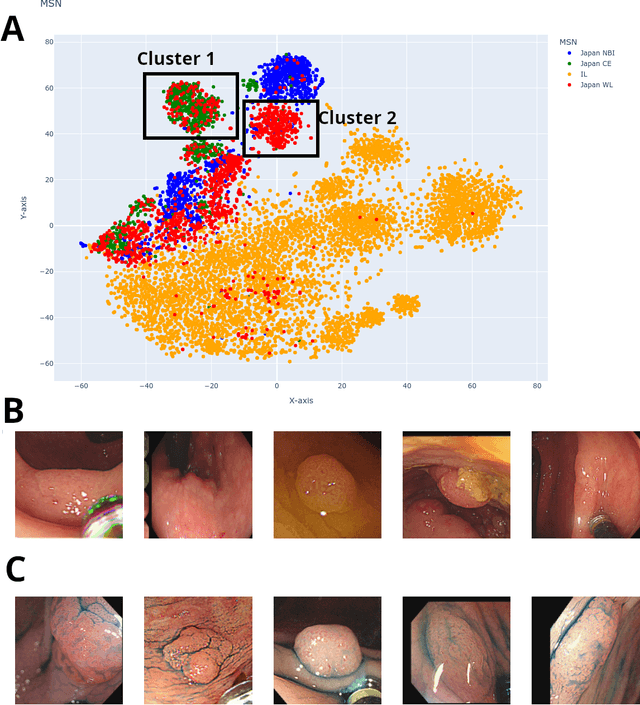
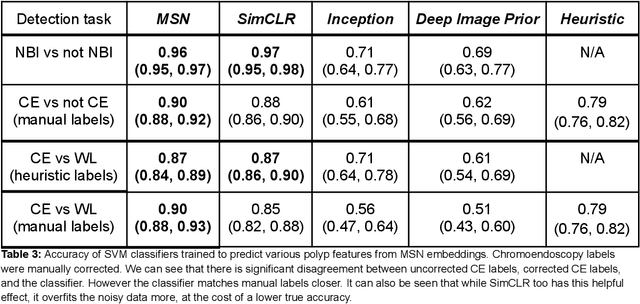
Background: Generalizability of AI colonoscopy algorithms is important for wider adoption in clinical practice. However, current techniques for evaluating performance on unseen data require expensive and time-intensive labels. Methods: We use a "Masked Siamese Network" (MSN) to identify novel phenomena in unseen data and predict polyp detector performance. MSN is trained to predict masked out regions of polyp images, without any labels. We test MSN's ability to be trained on data only from Israel and detect unseen techniques, narrow-band imaging (NBI) and chromendoscoy (CE), on colonoscopes from Japan (354 videos, 128 hours). We also test MSN's ability to predict performance of Computer Aided Detection (CADe) of polyps on colonoscopies from both countries, even though MSN is not trained on data from Japan. Results: MSN correctly identifies NBI and CE as less similar to Israel whitelight than Japan whitelight (bootstrapped z-test, |z| > 496, p < 10^-8 for both) using the label-free Frechet distance. MSN detects NBI with 99% accuracy, predicts CE better than our heuristic (90% vs 79% accuracy) despite being trained only on whitelight, and is the only method that is robust to noisy labels. MSN predicts CADe polyp detector performance on in-domain Israel and out-of-domain Japan colonoscopies (r=0.79, 0.37 respectively). With few examples of Japan detector performance to train on, MSN prediction of Japan performance improves (r=0.56). Conclusion: Our technique can identify distribution shifts in clinical data and can predict CADe detector performance on unseen data, without labels. Our self-supervised approach can aid in detecting when data in practice is different from training, such as between hospitals or data has meaningfully shifted from training. MSN has potential for application to medical image domains beyond colonoscopy.
CCC++: Optimized Color Classified Colorization with Segment Anything Model (SAM) Empowered Object Selective Color Harmonization
Mar 18, 2024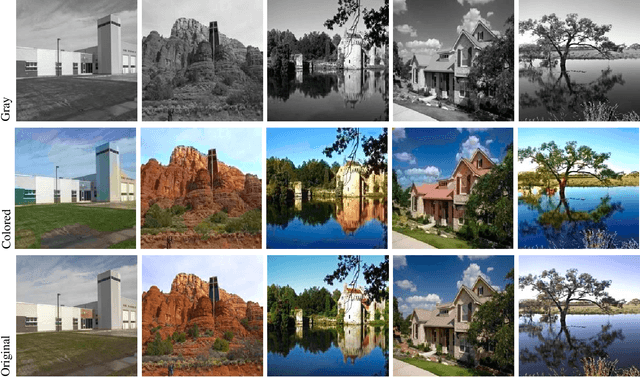
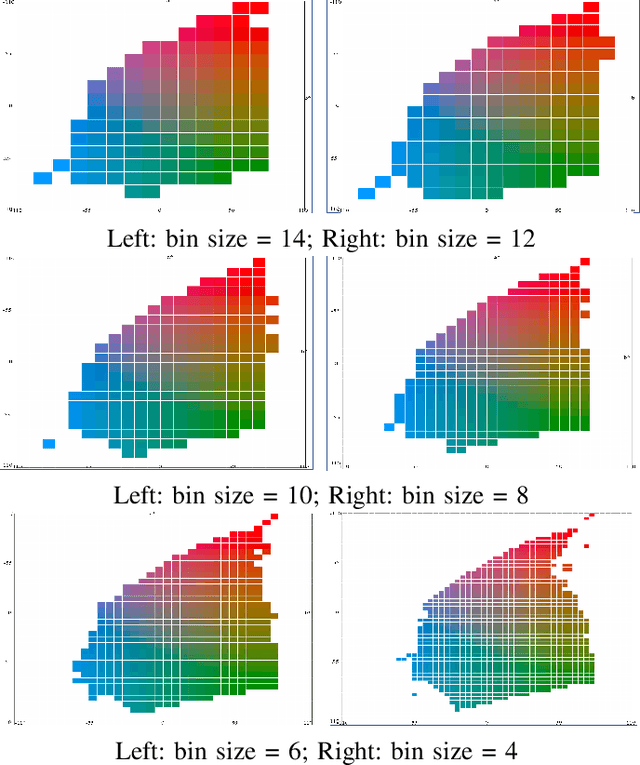
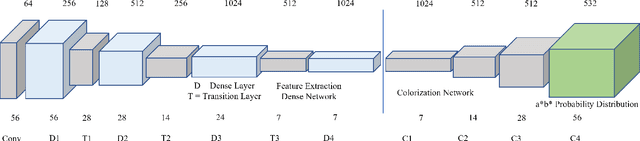
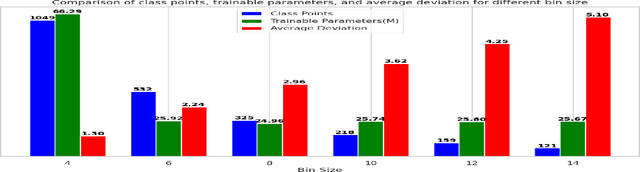
In this paper, we formulate the colorization problem into a multinomial classification problem and then apply a weighted function to classes. We propose a set of formulas to transform color values into color classes and vice versa. To optimize the classes, we experiment with different bin sizes for color class transformation. Observing class appearance, standard deviation, and model parameters on various extremely large-scale real-time images in practice we propose 532 color classes for our classification task. During training, we propose a class-weighted function based on true class appearance in each batch to ensure proper saturation of individual objects. We adjust the weights of the major classes, which are more frequently observed, by lowering them, while escalating the weights of the minor classes, which are less commonly observed. In our class re-weight formula, we propose a hyper-parameter for finding the optimal trade-off between the major and minor appeared classes. As we apply regularization to enhance the stability of the minor class, occasional minor noise may appear at the object's edges. We propose a novel object-selective color harmonization method empowered by the Segment Anything Model (SAM) to refine and enhance these edges. We propose two new color image evaluation metrics, the Color Class Activation Ratio (CCAR), and the True Activation Ratio (TAR), to quantify the richness of color components. We compare our proposed model with state-of-the-art models using six different dataset: Place, ADE, Celeba, COCO, Oxford 102 Flower, and ImageNet, in qualitative and quantitative approaches. The experimental results show that our proposed model outstrips other models in visualization, CNR and in our proposed CCAR and TAR measurement criteria while maintaining satisfactory performance in regression (MSE, PSNR), similarity (SSIM, LPIPS, UIUI), and generative criteria (FID).
Investigating Markers and Drivers of Gender Bias in Machine Translations
Mar 18, 2024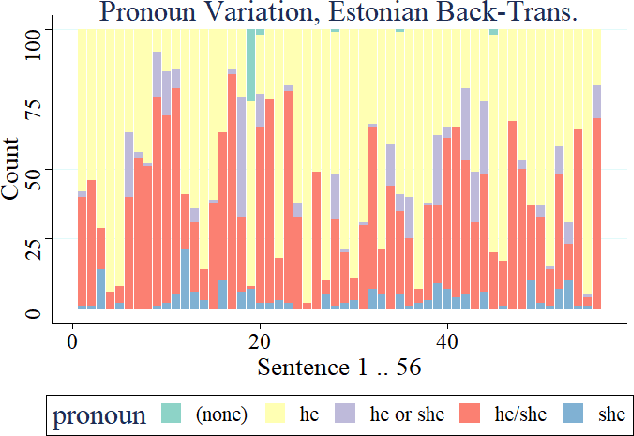
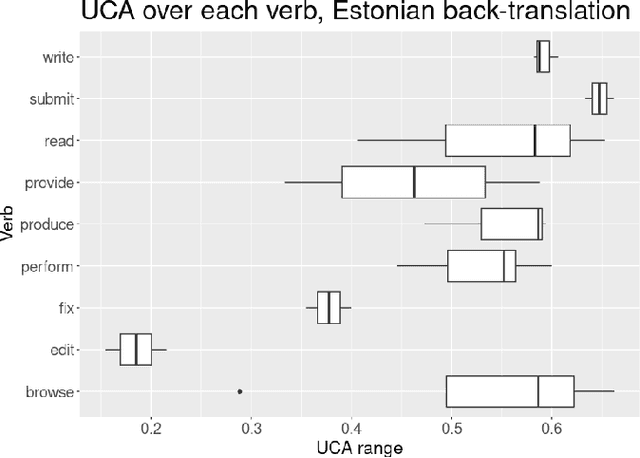
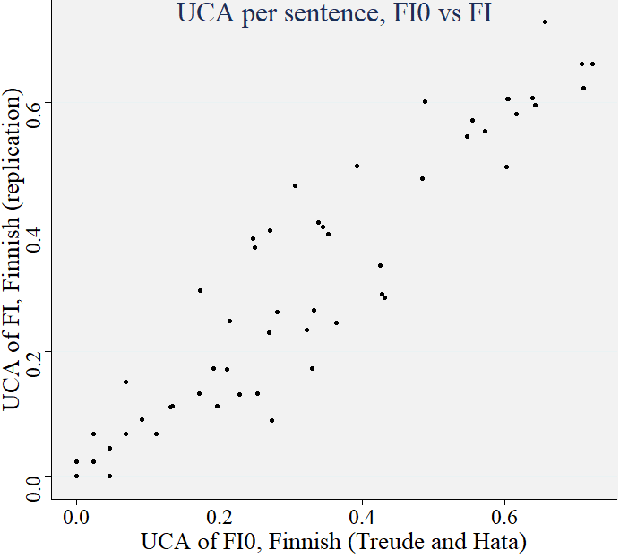
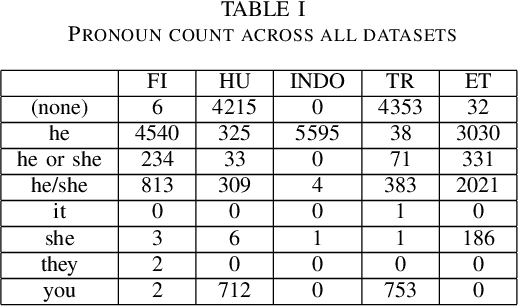
Implicit gender bias in Large Language Models (LLMs) is a well-documented problem, and implications of gender introduced into automatic translations can perpetuate real-world biases. However, some LLMs use heuristics or post-processing to mask such bias, making investigation difficult. Here, we examine bias in LLMss via back-translation, using the DeepL translation API to investigate the bias evinced when repeatedly translating a set of 56 Software Engineering tasks used in a previous study. Each statement starts with 'she', and is translated first into a 'genderless' intermediate language then back into English; we then examine pronoun-choice in the back-translated texts. We expand prior research in the following ways: (1) by comparing results across five intermediate languages, namely Finnish, Indonesian, Estonian, Turkish and Hungarian; (2) by proposing a novel metric for assessing the variation in gender implied in the repeated translations, avoiding the over-interpretation of individual pronouns, apparent in earlier work; (3) by investigating sentence features that drive bias; (4) and by comparing results from three time-lapsed datasets to establish the reproducibility of the approach. We found that some languages display similar patterns of pronoun use, falling into three loose groups, but that patterns vary between groups; this underlines the need to work with multiple languages. We also identify the main verb appearing in a sentence as a likely significant driver of implied gender in the translations. Moreover, we see a good level of replicability in the results, and establish that our variation metric proves robust despite an obvious change in the behaviour of the DeepL translation API during the course of the study. These results show that the back-translation method can provide further insights into bias in language models.
EnvGen: Generating and Adapting Environments via LLMs for Training Embodied Agents
Mar 18, 2024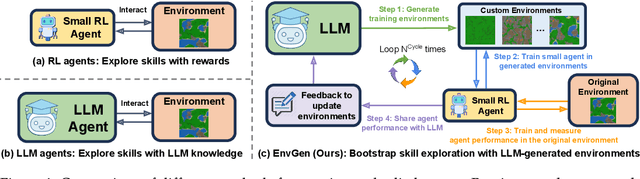
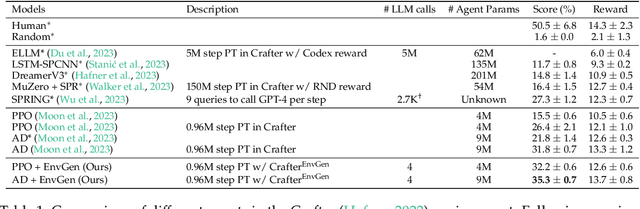
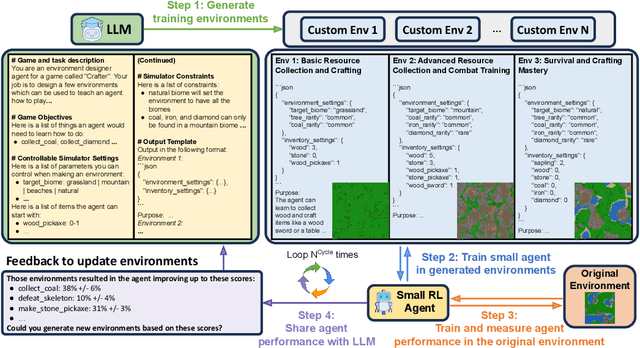

Recent SOTA approaches for embodied learning via interaction directly employ large language models (LLMs) as agents to determine the next steps in an environment. Due to their world knowledge and reasoning capabilities, LLM agents achieve stronger performance than previous smaller agents based on reinforcement learning (RL); however, frequently calling LLMs is slow and expensive. Instead of directly employing LLMs as agents, can we use LLMs' reasoning capabilities to adaptively create training environments to help smaller embodied RL agents learn useful skills that they are weak at? We propose EnvGen, a novel framework to address this question. First, we prompt an LLM to generate training environments that allow agents to quickly learn different tasks in parallel. Concretely, the LLM is given the task description and simulator objectives that the agents should learn and is then asked to generate a set of environment configurations (e.g., different terrains, items given to agents, etc.). Next, we train a small RL agent in a mixture of the original and LLM-generated environments. Then, we enable the LLM to continuously adapt the generated environments to progressively improve the skills that the agent is weak at, by providing feedback to the LLM in the form of the agent's performance. We demonstrate the usefulness of EnvGen with comprehensive experiments in Crafter and Heist environments. We find that a small RL agent trained with EnvGen can outperform SOTA methods, including a GPT-4 agent, and learns long-horizon tasks significantly faster. We show qualitatively how the LLM adapts training environments to help improve RL agents' weaker skills over time. Additionally, EnvGen is substantially more efficient as it only uses a small number of LLM calls (e.g., 4 in total), whereas LLM agents require thousands of LLM calls. Lastly, we present detailed ablation studies for our design choices.
STAR-RIS Aided Integrated Sensing and Communication over High Mobility Scenario
Mar 18, 2024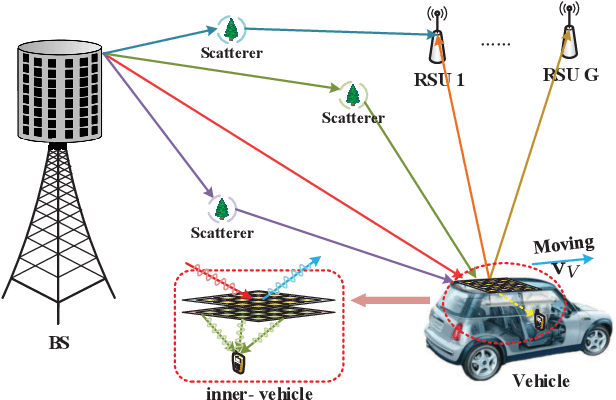
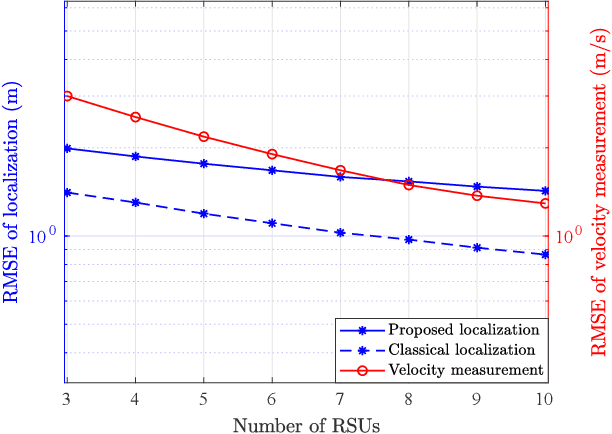
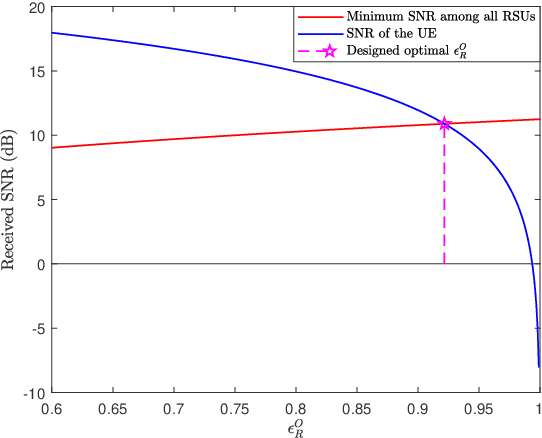
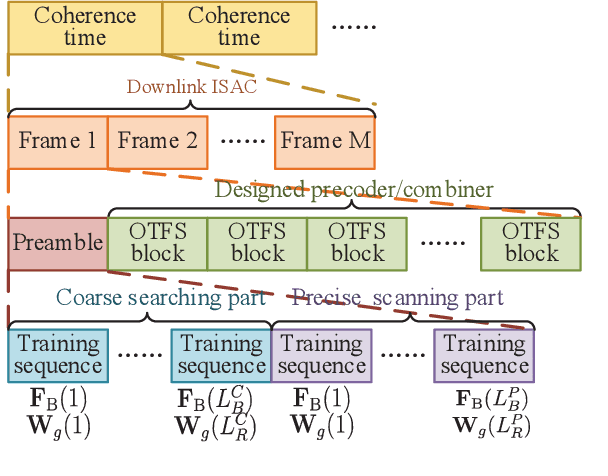
Integrated sensing and communication (ISAC) has become a promising technology for future communication system. In this paper, we consider a millimeter wave system over high mobility scenario, and propose a novel simultaneous transmission and reflection reconfigurable intelligent surface (STAR-RIS) aided ISAC scheme. To improve the communication service of the in-vehicle user equipment (UE) and simultaneously track and sense the vehicle with the help of nearby roadside units (RSUs), a STAR-RIS is equipped on the outside surface of the vehicle. Firstly, an efficient transmission structure is developed, where a number of training sequences with orthogonal precoders and combiners are respectively utilized at BS and RSUs for channel parameter extraction. Then, the near-field static channel model between the STAR-RIS and in-vehicle UE as well as the far-field time-frequency selective BS-RIS-RSUs channel model are characterized. By utilizing the multidimensional orthogonal matching pursuit (MOMP) algorithm, the cascaded channel parameters of the BS-RIS-RSUs links can be obtained at the RSUs. Thus, the vehicle localization and its velocity measurement can be acquired by jointly utilizing these extracted cascaded channel parameters of all RSUs. Note that the MOMP algorithm can be further utilized to extract the channel parameters of the BS-RIS-UE link for communication. With the help of sensing results, the phase shifts of the STAR-RIS are delicately designed, which can significantly improve the received signal strength for both the RSUs and the in-vehicle UE, and can finally enhance the sensing and communication performance. Moreover, the trade-off for sensing and communication is designed by optimizing the energy splitting factors of the STAR-RIS. Finally, simulation results are provided to validate the feasibility and effectiveness of our proposed STAR-RIS aided ISAC scheme.