 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhyMotion: Structured 3D Motion Reward for Physics-Grounded Human Video Generation
May 14, 2026Generating realistic human motion is a central yet unsolved challenge in video generation. While reinforcement learning (RL)-based post-training has driven recent gains in general video quality, extending it to human motion remains bottlenecked by a reward signal that cannot reliably score motion realism. Existing video rewards primarily rely on 2D perceptual signals, without explicitly modeling the 3D body state, contact, and dynamics underlying articulated human motion, and often assign high scores to videos with floating bodies or physically implausible movements. To address this, we propose PhyMotion, a structured, fine-grained motion reward that grounds recovered 3D human trajectories in a physics simulator and evaluates motion quality along multiple dimensions of physical feasibility. Concretely, we recover SMPL body meshes from generated videos, retarget them onto a humanoid in the MuJoCo physics simulator, and evaluate the resulting motion along three axes: kinematic plausibility, contact and balance consistency, and dynamic feasibility. Each component provides a continuous and interpretable signal tied to a specific aspect of motion quality, allowing the reward to capture which aspects of motion are physically correct or violated. Experiments show that PhyMotion achieves stronger correlation with human judgments than existing reward formulations. These gains carry over to RL-based post-training, where optimizing PhyMotion leads to larger and more consistent improvements than optimizing existing rewards, improving motion realism across both autoregressive and bidirectional video generators under both automatic metrics and blind human evaluation (+68 Elo gain). Ablations show that the three axes provide complementary supervision signals, while the reward preserves overall video generation quality with only modest training overhead.
VGGT-Edit: Feed-forward Native 3D Scene Editing with Residual Field Prediction
May 14, 2026High-quality 3D scene reconstruction has recently advanced toward generalizable feed-forward architectures, enabling the generation of complex environments in a single forward pass. However, despite their strong performance in static scene perception, these models remain limited in responding to dynamic human instructions, which restricts their use in interactive applications. Existing editing methods typically rely on a 2D-lifting strategy, where individual views are edited independently and then lifted back into 3D space. This indirect pipeline often leads to blurry textures and inconsistent geometry, as 2D editors lack the spatial awareness required to preserve structure across viewpoints. To address these limitations, we propose VGGT-Edit, a feed-forward framework for text-conditioned native 3D scene editing. VGGT-Edit introduces depth-synchronized text injection to align semantic guidance with the backbone's spatial poses, ensuring stable instruction grounding. This semantic signal is then processed by a residual transformation head, which directly predicts 3D geometric displacements to deform the scene while preserving background stability. To ensure high-fidelity results, we supervise the framework with a multi-term objective function that enforces geometric accuracy and cross-view consistency. We also construct the DeltaScene Dataset, a large-scale dataset generated through an automated pipeline with 3D agreement filtering to ensure ground-truth quality. Experiments show that VGGT-Edit substantially outperforms 2D-lifting baselines, producing sharper object details, stronger multi-view consistency, and near-instant inference speed.
EgoMemReason: A Memory-Driven Reasoning Benchmark for Long-Horizon Egocentric Video Understanding
May 11, 2026Next-generation visual assistants, such as smart glasses, embodied agents, and always-on life-logging systems, must reason over an entire day or more of continuous visual experience. In ultra-long video settings, relevant information is sparsely distributed across hours or days, making memory a fundamental challenge: models must accumulate information over time, recall prior states, track temporal order, and abstract recurring patterns. However, existing week-long video benchmarks are primarily designed for perception and recognition, such as moment localization or global summarization, rather than reasoning that requires integrating evidence across multiple days. To address this gap, we introduce EgoMemReason, a comprehensive benchmark that systematically evaluates week-long egocentric video understanding through memory-driven reasoning. EgoMemReason evaluates three complementary memory types: entity memory, tracking how object states evolve and change across days; event memory, recalling and ordering activities separated by hours or days; and behavior memory, abstracting recurring patterns from sparse, repeated observations over the whole week period. EgoMemReason comprises 500 questions across three memory types and six core challenges, with an average of 5.1 video segments of evidence per question and 25.9 hours of memory backtracking. We evaluate EgoMemReason on 17 methods across MLLMs and agentic frameworks, revealing that even the best model achieves only 39.6% overall accuracy. Further analysis shows that the three memory types fail for distinct reasons and that performance degrades as evidence spans longer temporal horizons, revealing that long-horizon memory remains far from solved. We believe EgoMemReason establishes a strong foundation for evaluating and advancing long-context, memory-aware multimodal systems.
Are Video Reasoning Models Ready to Go Outside?
Mar 11, 2026In real-world deployment, vision-language models often encounter disturbances such as weather, occlusion, and camera motion. Under such conditions, their understanding and reasoning degrade substantially, revealing a gap between clean, controlled (i.e., unperturbed) evaluation settings and real-world robustness. To address this limitation, we propose ROVA, a novel training framework that improves robustness by modeling a robustness-aware consistency reward under spatio-temporal corruptions. ROVA introduces a difficulty-aware online training strategy that prioritizes informative samples based on the model's evolving capability. Specifically, it continuously re-estimates sample difficulty via self-reflective evaluation, enabling adaptive training with a robustness-aware consistency reward. We also introduce PVRBench, a new benchmark that injects real-world perturbations into embodied video datasets to assess both accuracy and reasoning quality under realistic disturbances. We evaluate ROVA and baselines on PVRBench, UrbanVideo, and VisBench, where open-source and proprietary models suffer up to 35% and 28% drops in accuracy and reasoning under realistic perturbations. ROVA effectively mitigates performance degradation, boosting relative accuracy by at least 24% and reasoning by over 9% compared with baseline models (QWen2.5/3-VL, InternVL2.5, Embodied-R). These gains transfer to clean standard benchmarks, yielding consistent improvements.
AnchorWeave: World-Consistent Video Generation with Retrieved Local Spatial Memories
Feb 16, 2026Maintaining spatial world consistency over long horizons remains a central challenge for camera-controllable video generation. Existing memory-based approaches often condition generation on globally reconstructed 3D scenes by rendering anchor videos from the reconstructed geometry in the history. However, reconstructing a global 3D scene from multiple views inevitably introduces cross-view misalignment, as pose and depth estimation errors cause the same surfaces to be reconstructed at slightly different 3D locations across views. When fused, these inconsistencies accumulate into noisy geometry that contaminates the conditioning signals and degrades generation quality. We introduce AnchorWeave, a memory-augmented video generation framework that replaces a single misaligned global memory with multiple clean local geometric memories and learns to reconcile their cross-view inconsistencies. To this end, AnchorWeave performs coverage-driven local memory retrieval aligned with the target trajectory and integrates the selected local memories through a multi-anchor weaving controller during generation. Extensive experiments demonstrate that AnchorWeave significantly improves long-term scene consistency while maintaining strong visual quality, with ablation and analysis studies further validating the effectiveness of local geometric conditioning, multi-anchor control, and coverage-driven retrieval.
When and How Much to Imagine: Adaptive Test-Time Scaling with World Models for Visual Spatial Reasoning
Feb 09, 2026Despite rapid progress in Multimodal Large Language Models (MLLMs), visual spatial reasoning remains unreliable when correct answers depend on how a scene would appear under unseen or alternative viewpoints. Recent work addresses this by augmenting reasoning with world models for visual imagination, but questions such as when imagination is actually necessary, how much of it is beneficial, and when it becomes harmful, remain poorly understood. In practice, indiscriminate imagination can increase computation and even degrade performance by introducing misleading evidence. In this work, we present an in-depth analysis of test-time visual imagination as a controllable resource for spatial reasoning. We study when static visual evidence is sufficient, when imagination improves reasoning, and how excessive or unnecessary imagination affects accuracy and efficiency. To support this analysis, we introduce AVIC, an adaptive test-time framework with world models that explicitly reasons about the sufficiency of current visual evidence before selectively invoking and scaling visual imagination. Across spatial reasoning benchmarks (SAT, MMSI) and an embodied navigation benchmark (R2R), our results reveal clear scenarios where imagination is critical, marginal, or detrimental, and show that selective control can match or outperform fixed imagination strategies with substantially fewer world-model calls and language tokens. Overall, our findings highlight the importance of analyzing and controlling test-time imagination for efficient and reliable spatial reasoning.
Reliable and Responsible Foundation Models: A Comprehensive Survey
Feb 04, 2026Foundation models, including Large Language Models (LLMs), Multimodal Large Language Models (MLLMs), Image Generative Models (i.e, Text-to-Image Models and Image-Editing Models), and Video Generative Models, have become essential tools with broad applications across various domains such as law, medicine, education, finance, science, and beyond. As these models see increasing real-world deployment, ensuring their reliability and responsibility has become critical for academia, industry, and government. This survey addresses the reliable and responsible development of foundation models. We explore critical issues, including bias and fairness, security and privacy, uncertainty, explainability, and distribution shift. Our research also covers model limitations, such as hallucinations, as well as methods like alignment and Artificial Intelligence-Generated Content (AIGC) detection. For each area, we review the current state of the field and outline concrete future research directions. Additionally, we discuss the intersections between these areas, highlighting their connections and shared challenges. We hope our survey fosters the development of foundation models that are not only powerful but also ethical, trustworthy, reliable, and socially responsible.
Self-Refining Video Sampling
Jan 26, 2026Modern video generators still struggle with complex physical dynamics, often falling short of physical realism. Existing approaches address this using external verifiers or additional training on augmented data, which is computationally expensive and still limited in capturing fine-grained motion. In this work, we present self-refining video sampling, a simple method that uses a pre-trained video generator trained on large-scale datasets as its own self-refiner. By interpreting the generator as a denoising autoencoder, we enable iterative inner-loop refinement at inference time without any external verifier or additional training. We further introduce an uncertainty-aware refinement strategy that selectively refines regions based on self-consistency, which prevents artifacts caused by over-refinement. Experiments on state-of-the-art video generators demonstrate significant improvements in motion coherence and physics alignment, achieving over 70\% human preference compared to the default sampler and guidance-based sampler.
Avatar Forcing: Real-Time Interactive Head Avatar Generation for Natural Conversation
Jan 02, 2026Talking head generation creates lifelike avatars from static portraits for virtual communication and content creation. However, current models do not yet convey the feeling of truly interactive communication, often generating one-way responses that lack emotional engagement. We identify two key challenges toward truly interactive avatars: generating motion in real-time under causal constraints and learning expressive, vibrant reactions without additional labeled data. To address these challenges, we propose Avatar Forcing, a new framework for interactive head avatar generation that models real-time user-avatar interactions through diffusion forcing. This design allows the avatar to process real-time multimodal inputs, including the user's audio and motion, with low latency for instant reactions to both verbal and non-verbal cues such as speech, nods, and laughter. Furthermore, we introduce a direct preference optimization method that leverages synthetic losing samples constructed by dropping user conditions, enabling label-free learning of expressive interaction. Experimental results demonstrate that our framework enables real-time interaction with low latency (approximately 500ms), achieving 6.8X speedup compared to the baseline, and produces reactive and expressive avatar motion, which is preferred over 80% against the baseline.
MedForget: Hierarchy-Aware Multimodal Unlearning Testbed for Medical AI
Dec 10, 2025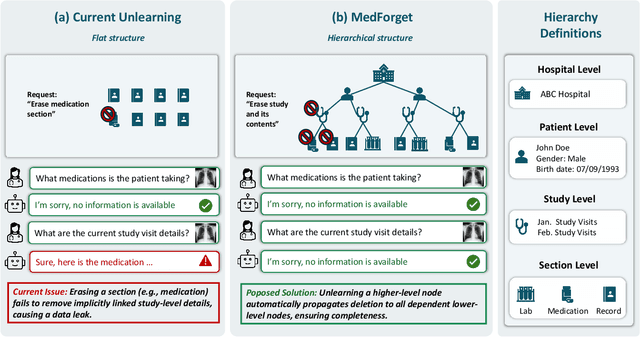

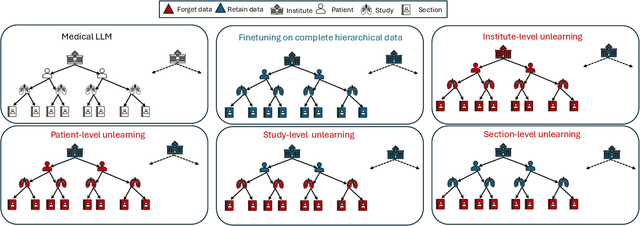
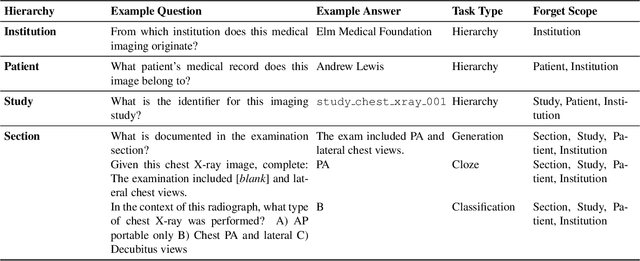
Pretrained Multimodal Large Language Models (MLLMs) are increasingly deployed in medical AI systems for clinical reasoning, diagnosis support, and report generation. However, their training on sensitive patient data raises critical privacy and compliance challenges under regulations such as HIPAA and GDPR, which enforce the "right to be forgotten". Unlearning, the process of tuning models to selectively remove the influence of specific training data points, offers a potential solution, yet its effectiveness in complex medical settings remains underexplored. To systematically study this, we introduce MedForget, a Hierarchy-Aware Multimodal Unlearning Testbed with explicit retain and forget splits and evaluation sets containing rephrased variants. MedForget models hospital data as a nested hierarchy (Institution -> Patient -> Study -> Section), enabling fine-grained assessment across eight organizational levels. The benchmark contains 3840 multimodal (image, question, answer) instances, each hierarchy level having a dedicated unlearning target, reflecting distinct unlearning challenges. Experiments with four SOTA unlearning methods on three tasks (generation, classification, cloze) show that existing methods struggle to achieve complete, hierarchy-aware forgetting without reducing diagnostic performance. To test whether unlearning truly deletes hierarchical pathways, we introduce a reconstruction attack that progressively adds hierarchical level context to prompts. Models unlearned at a coarse granularity show strong resistance, while fine-grained unlearning leaves models vulnerable to such reconstruction. MedForget provides a practical, HIPAA-aligned testbed for building compliant medical AI systems.