 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Reachability-based Trajectory Design with Neural Implicit Safety Constraints
Feb 14, 2023
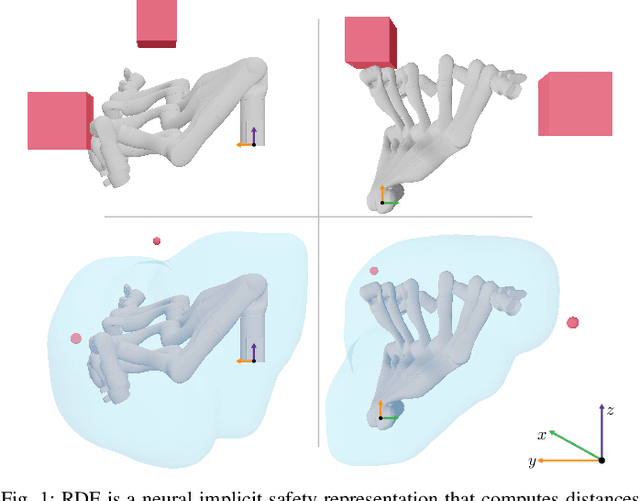
Generating safe motion plans in real-time is a key requirement for deploying robot manipulators to assist humans in collaborative settings. In particular, robots must satisfy strict safety requirements to avoid self-damage or harming nearby humans. Satisfying these requirements is particularly challenging if the robot must also operate in real-time to adjust to changes in its environment.This paper addresses these challenges by proposing Reachability-based Signed Distance Functions (RDFs) as a neural implicit representation for robot safety. RDF, which can be constructed using supervised learning in a tractable fashion, accurately predicts the distance between the swept volume of a robot arm and an obstacle. RDF's inference and gradient computations are fast and scale linearly with the dimension of the system; these features enable its use within a novel real-time trajectory planning framework as a continuous-time collision-avoidance constraint. The planning method using RDF is compared to a variety of state-of-the-art techniques and is demonstrated to successfully solve challenging motion planning tasks for high-dimensional systems faster and more reliably than all tested methods.
EfficientTempNet: Temporal Super-Resolution of Radar Rainfall
Mar 09, 2023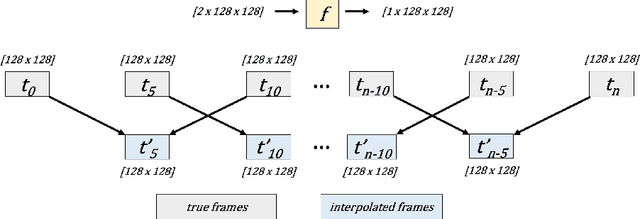


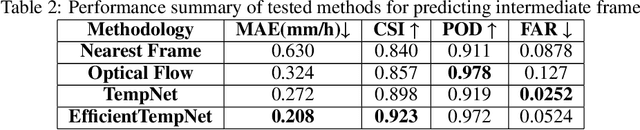
Rainfall data collected by various remote sensing instruments such as radars or satellites has different space-time resolutions. This study aims to improve the temporal resolution of radar rainfall products to help with more accurate climate change modeling and studies. In this direction, we introduce a solution based on EfficientNetV2, namely EfficientTempNet, to increase the temporal resolution of radar-based rainfall products from 10 minutes to 5 minutes. We tested EfficientRainNet over a dataset for the state of Iowa, US, and compared its performance to three different baselines to show that EfficientTempNet presents a viable option for better climate change monitoring.
Fast kernel methods for Data Quality Monitoring as a goodness-of-fit test
Mar 09, 2023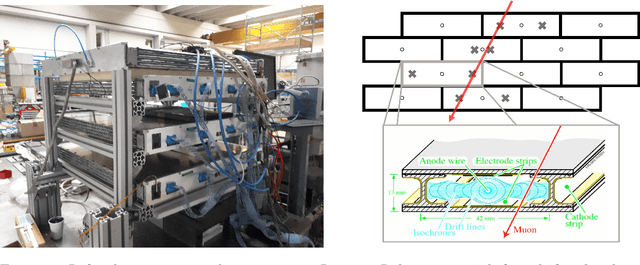
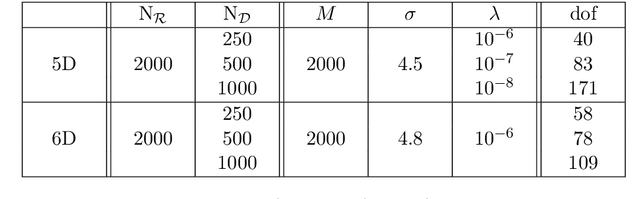
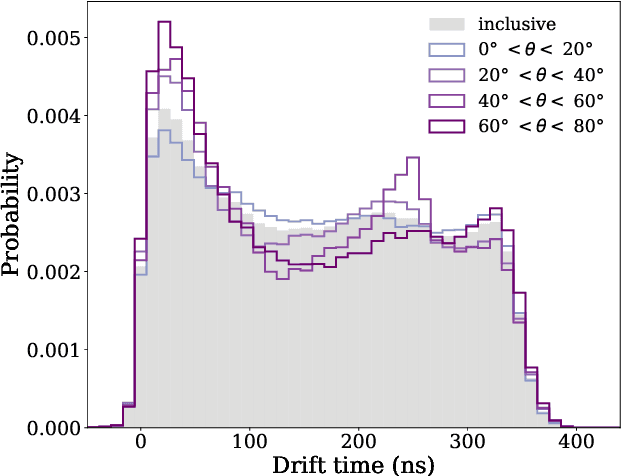
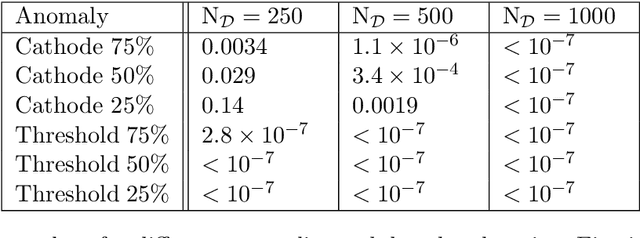
We here propose a machine learning approach for monitoring particle detectors in real-time. The goal is to assess the compatibility of incoming experimental data with a reference dataset, characterising the data behaviour under normal circumstances, via a likelihood-ratio hypothesis test. The model is based on a modern implementation of kernel methods, nonparametric algorithms that can learn any continuous function given enough data. The resulting approach is efficient and agnostic to the type of anomaly that may be present in the data. Our study demonstrates the effectiveness of this strategy on multivariate data from drift tube chamber muon detectors.
Searching for long faint astronomical high energy transients: a data driven approach
Mar 28, 2023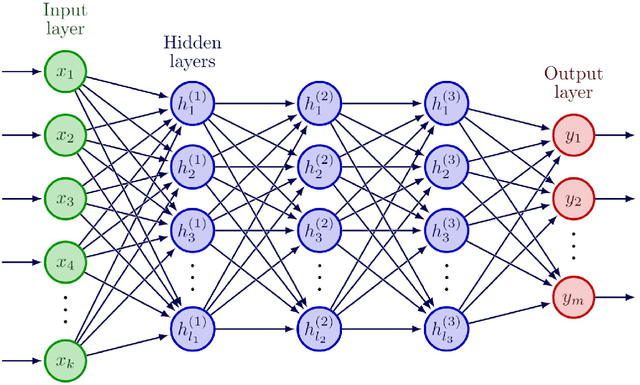
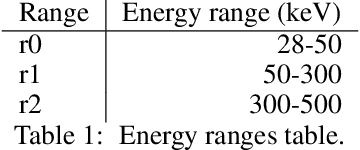
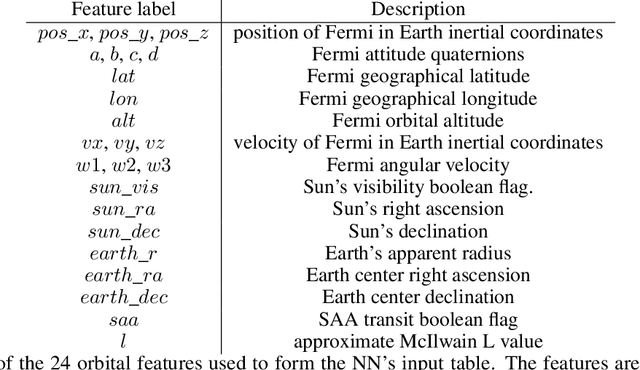
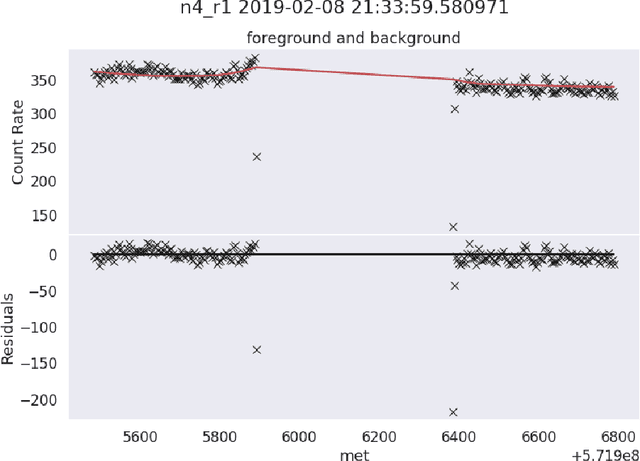
HERMES (High Energy Rapid Modular Ensemble of Satellites) pathfinder is an in-orbit demonstration consisting of a constellation of six 3U nano-satellites hosting simple but innovative detectors for the monitoring of cosmic high-energy transients. The main objective of HERMES Pathfinder is to prove that accurate position of high-energy cosmic transients can be obtained using miniaturized hardware. The transient position is obtained by studying the delay time of arrival of the signal to different detectors hosted by nano-satellites on low Earth orbits. To this purpose, the goal is to achive an overall accuracy of a fraction of a micro-second. In this context, we need to develop novel tools to fully exploit the future scientific data output of HERMES Pathfinder. In this paper, we introduce a new framework to assess the background count rate of a space-born, high energy detector; a key step towards the identification of faint astrophysical transients. We employ a Neural Network (NN) to estimate the background lightcurves on different timescales. Subsequently, we employ a fast change-point and anomaly detection technique to isolate observation segments where statistically significant excesses in the observed count rate relative to the background estimate exist. We test the new software on archival data from the NASA Fermi Gamma-ray Burst Monitor (GBM), which has a collecting area and background level of the same order of magnitude to those of HERMES Pathfinder. The NN performances are discussed and analyzed over period of both high and low solar activity. We were able to confirm events in the Fermi/GBM catalog and found events, not present in Fermi/GBM database, that could be attributed to Solar Flares, Terrestrial Gamma-ray Flashes, Gamma-Ray Bursts, Galactic X-ray flash. Seven of these are selected and analyzed further, providing an estimate of localisation and a tentative classification.
Scaling Multi-Objective Security Games Provably via Space Discretization Based Evolutionary Search
Mar 28, 2023In the field of security, multi-objective security games (MOSGs) allow defenders to simultaneously protect targets from multiple heterogeneous attackers. MOSGs aim to simultaneously maximize all the heterogeneous payoffs, e.g., life, money, and crime rate, without merging heterogeneous attackers. In real-world scenarios, the number of heterogeneous attackers and targets to be protected may exceed the capability of most existing state-of-the-art methods, i.e., MOSGs are limited by the issue of scalability. To this end, this paper proposes a general framework called SDES based on many-objective evolutionary search to scale up MOSGs to large-scale targets and heterogeneous attackers. SDES consists of four consecutive key components, i.e., discretization, optimization, restoration and evaluation, and refinement. Specifically, SDES first discretizes the originally high-dimensional continuous solution space to the low-dimensional discrete one by the maximal indifference property in game theory. This property helps evolutionary algorithms (EAs) bypass the high-dimensional step function and ensure a well-convergent Pareto front. Then, a many-objective EA is used for optimization in the low-dimensional discrete solution space to obtain a well-spaced Pareto front. To evaluate solutions, SDES restores solutions back to the original space via bit-wisely optimizing a novel solution divergence. Finally, the refinement in SDES boosts the optimization performance with acceptable cost. Theoretically, we prove the optimization consistency and convergence of SDES. Experiment results show that SDES is the first linear-time MOSG algorithm for both large-scale attackers and targets. SDES is able to solve up to 20 attackers and 100 targets MOSG problems, while the state-of-the-art methods can only solve up to 8 attackers and 25 targets ones. Ablation study verifies the necessity of all components in SDES.
A unified scalable framework for causal sweeping strategies for Physics-Informed Neural Networks (PINNs) and their temporal decompositions
Feb 28, 2023

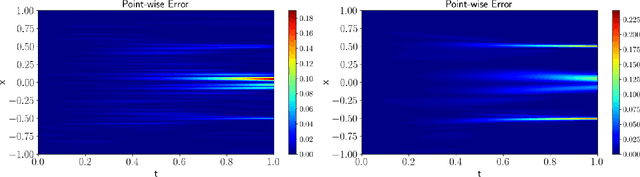
Physics-informed neural networks (PINNs) as a means of solving partial differential equations (PDE) have garnered much attention in Computational Science and Engineering (CS&E). However, a recent topic of interest is exploring various training (i.e., optimization) challenges - in particular, arriving at poor local minima in the optimization landscape results in a PINN approximation giving an inferior, and sometimes trivial, solution when solving forward time-dependent PDEs with no data. This problem is also found in, and in some sense more difficult, with domain decomposition strategies such as temporal decomposition using XPINNs. To address this problem, we first enable a general categorization for previous causality methods, from which we identify a gap in the previous approaches. We then furnish examples and explanations for different training challenges, their cause, and how they relate to information propagation and temporal decomposition. We propose a solution to fill this gap by reframing these causality concepts into a generalized information propagation framework in which any prior method or combination of methods can be described. Our unified framework moves toward reducing the number of PINN methods to consider and the implementation and retuning cost for thorough comparisons. We propose a new stacked-decomposition method that bridges the gap between time-marching PINNs and XPINNs. We also introduce significant computational speed-ups by using transfer learning concepts to initialize subnetworks in the domain and loss tolerance-based propagation for the subdomains. We formulate a new time-sweeping collocation point algorithm inspired by the previous PINNs causality literature, which our framework can still describe, and provides a significant computational speed-up via reduced-cost collocation point segmentation. Finally, we provide numerical results on baseline PDE problems.
Large-Scale Exploration of Cave Environments by Unmanned Aerial Vehicles
Mar 06, 2023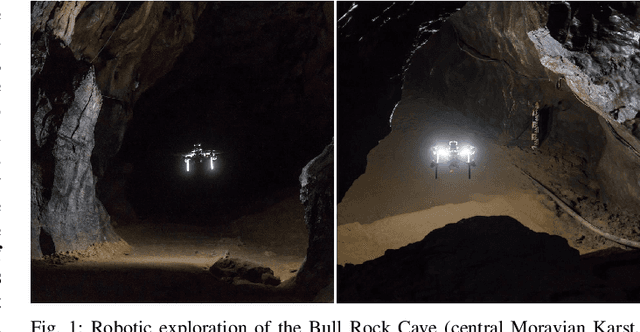
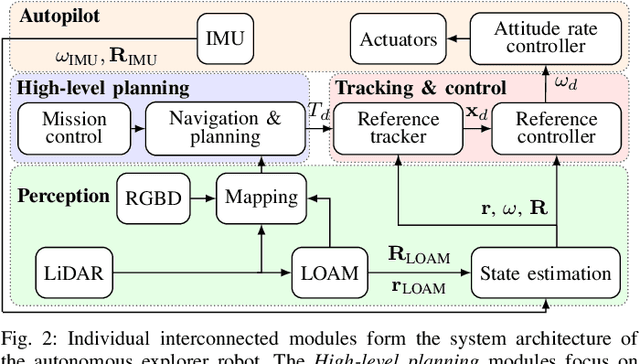
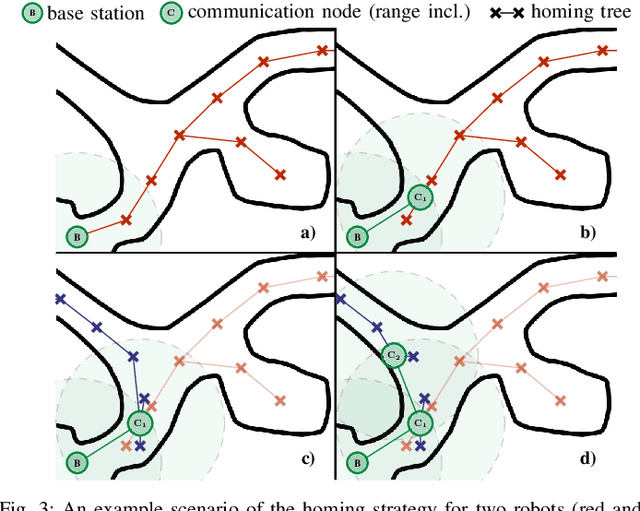
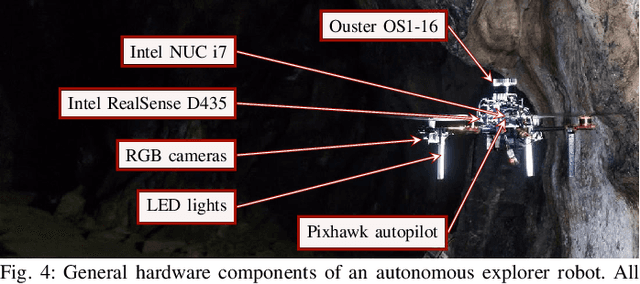
This paper presents a self-contained system for the robust utilization of aerial robots in the autonomous exploration of cave environments to help human explorers, first responders, and speleologists. The proposed system is generally applicable to an arbitrary exploration task within an unknown and unstructured subterranean environment and interconnects crucial robotic subsystems to provide full autonomy of the robots. Such subsystems primarily include mapping, path and trajectory planning, localization, control, and decision making. Due to the diversity, complexity, and structural uncertainty of natural cave environments, the proposed system allows for the possible use of any arbitrary exploration strategy for a single robot, as well as for a cooperating team. A multi-robot cooperation strategy that maximizes the limited flight time of each aerial robot is proposed for exploration and search & rescue scenarios where the homing of all deployed robots back to an initial location is not required The entire system is validated in a comprehensive experimental analysis comprising of hours of flight time in a real-world cave environment, as well as by hundreds of hours within a state-of-the-art virtual testbed that was developed for the DARPA Subterranean Challenge robotic competition. Among others, experimental results include multiple real-world exploration flights traveling over 470 meters on a single battery in a demanding unknown cave environment.
Online Learning and Optimization for Queues with Unknown Demand Curve and Service Distribution
Mar 06, 2023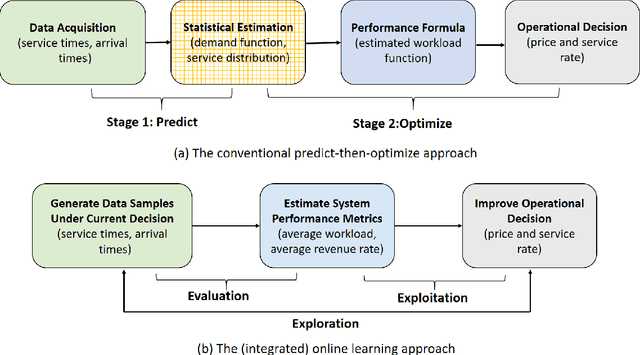
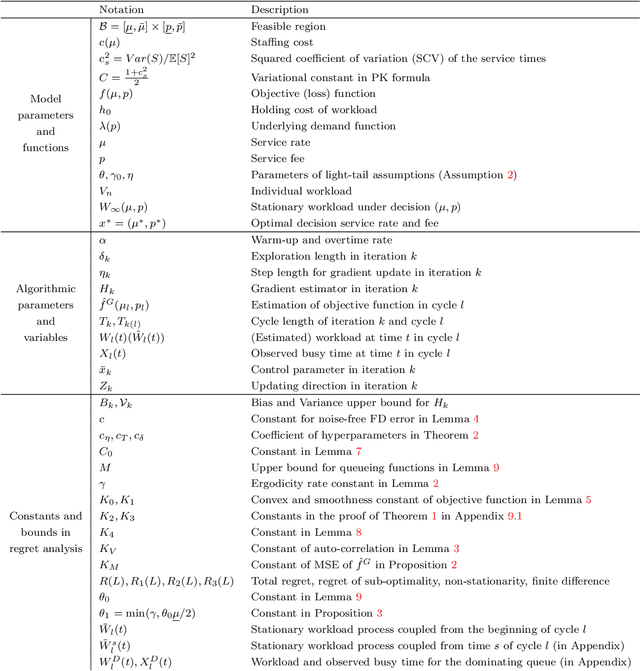
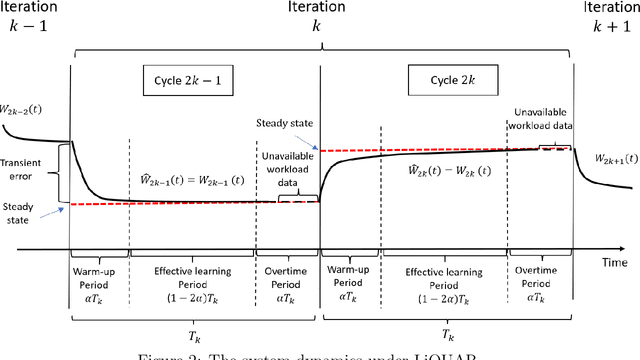
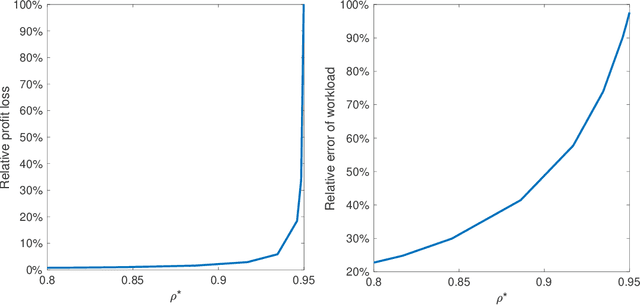
We investigate an optimization problem in a queueing system where the service provider selects the optimal service fee p and service capacity \mu to maximize the cumulative expected profit (the service revenue minus the capacity cost and delay penalty). The conventional predict-then-optimize (PTO) approach takes two steps: first, it estimates the model parameters (e.g., arrival rate and service-time distribution) from data; second, it optimizes a model based on the estimated parameters. A major drawback of PTO is that its solution accuracy can often be highly sensitive to the parameter estimation errors because PTO is unable to properly link these errors (step 1) to the quality of the optimized solutions (step 2). To remedy this issue, we develop an online learning framework that automatically incorporates the aforementioned parameter estimation errors in the solution prescription process; it is an integrated method that can "learn" the optimal solution without needing to set up the parameter estimation as a separate step as in PTO. Effectiveness of our online learning approach is substantiated by (i) theoretical results including the algorithm convergence and analysis of the regret ("cost" to pay over time for the algorithm to learn the optimal policy), and (ii) engineering confirmation via simulation experiments of a variety of representative examples. We also provide careful comparisons for PTO and the online learning method.
Sparse in Space and Time: Audio-visual Synchronisation with Trainable Selectors
Oct 13, 2022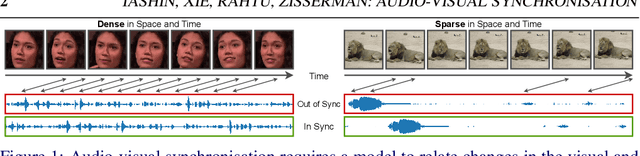
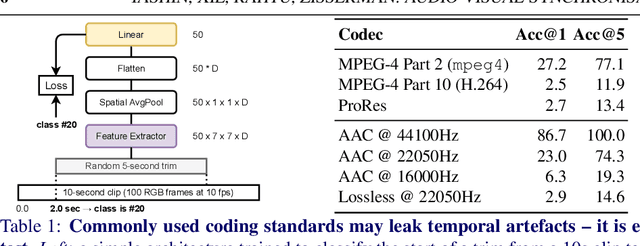
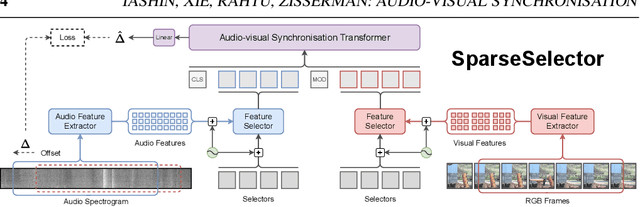
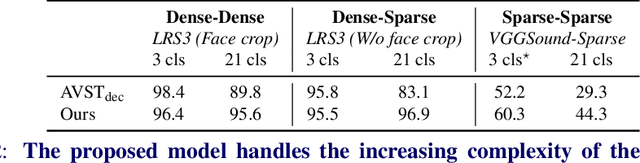
The objective of this paper is audio-visual synchronisation of general videos 'in the wild'. For such videos, the events that may be harnessed for synchronisation cues may be spatially small and may occur only infrequently during a many seconds-long video clip, i.e. the synchronisation signal is 'sparse in space and time'. This contrasts with the case of synchronising videos of talking heads, where audio-visual correspondence is dense in both time and space. We make four contributions: (i) in order to handle longer temporal sequences required for sparse synchronisation signals, we design a multi-modal transformer model that employs 'selectors' to distil the long audio and visual streams into small sequences that are then used to predict the temporal offset between streams. (ii) We identify artefacts that can arise from the compression codecs used for audio and video and can be used by audio-visual models in training to artificially solve the synchronisation task. (iii) We curate a dataset with only sparse in time and space synchronisation signals; and (iv) the effectiveness of the proposed model is shown on both dense and sparse datasets quantitatively and qualitatively. Project page: v-iashin.github.io/SparseSync
Decoding and Visualising Intended Emotion in an Expressive Piano Performance
Mar 03, 2023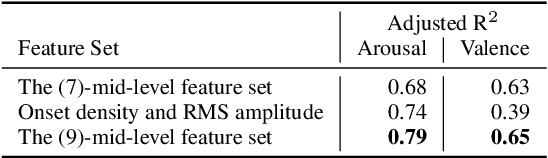
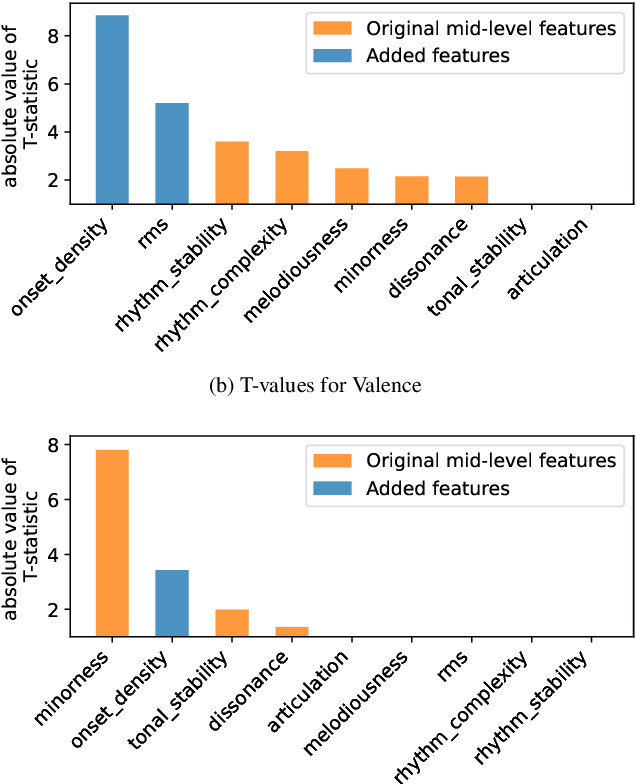
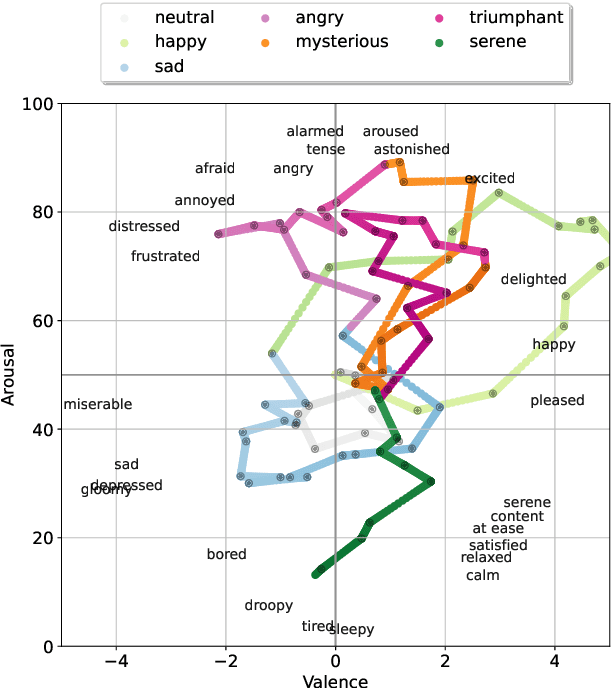
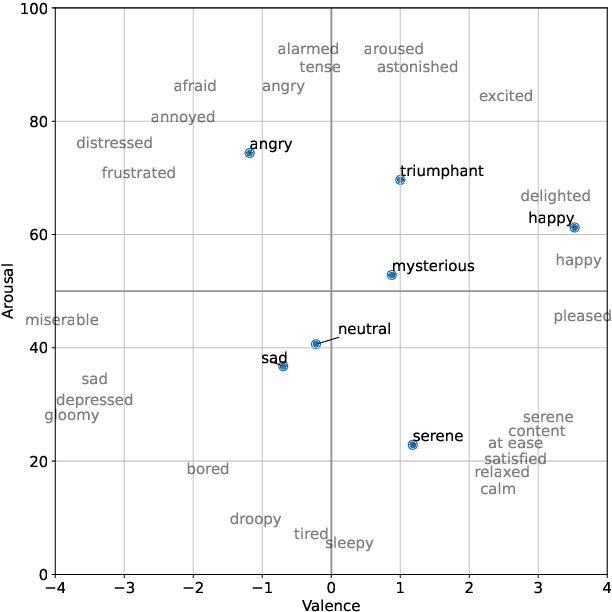
Expert musicians can mould a musical piece to convey specific emotions that they intend to communicate. In this paper, we place a mid-level features based music emotion model in this performer-to-listener communication scenario, and demonstrate via a small visualisation music emotion decoding in real time. We also extend the existing set of mid-level features using analogues of perceptual speed and perceived dynamics.