 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePre-training helps Bayesian optimization too
Jul 07, 2022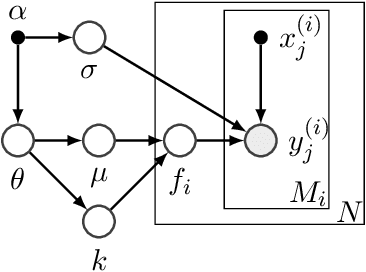
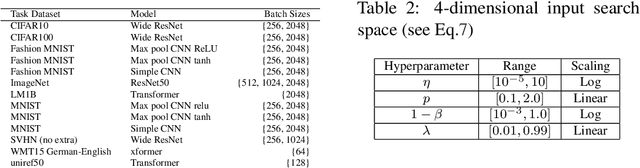
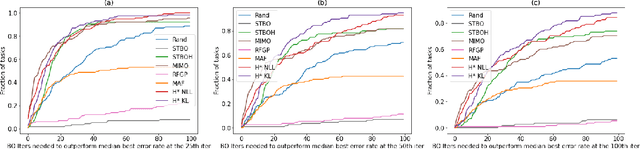
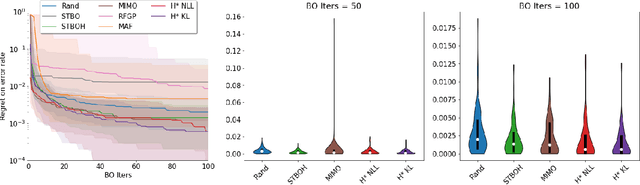
Bayesian optimization (BO) has become a popular strategy for global optimization of many expensive real-world functions. Contrary to a common belief that BO is suited to optimizing black-box functions, it actually requires domain knowledge on characteristics of those functions to deploy BO successfully. Such domain knowledge often manifests in Gaussian process priors that specify initial beliefs on functions. However, even with expert knowledge, it is not an easy task to select a prior. This is especially true for hyperparameter tuning problems on complex machine learning models, where landscapes of tuning objectives are often difficult to comprehend. We seek an alternative practice for setting these functional priors. In particular, we consider the scenario where we have data from similar functions that allow us to pre-train a tighter distribution a priori. To verify our approach in realistic model training setups, we collected a large multi-task hyperparameter tuning dataset by training tens of thousands of configurations of near-state-of-the-art models on popular image and text datasets, as well as a protein sequence dataset. Our results show that on average, our method is able to locate good hyperparameters at least 3 times more efficiently than the best competing methods.
Predicting the utility of search spaces for black-box optimization: a simple, budget-aware approach
Dec 16, 2021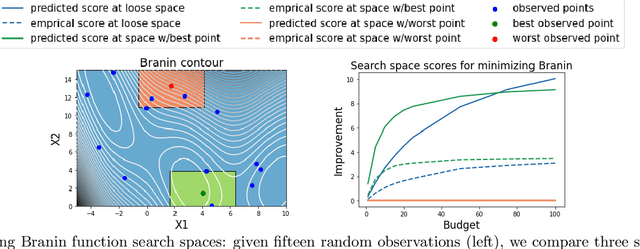
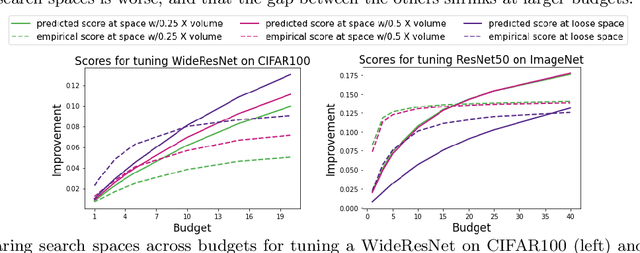
Black box optimization requires specifying a search space to explore for solutions, e.g. a d-dimensional compact space, and this choice is critical for getting the best results at a reasonable budget. Unfortunately, determining a high quality search space can be challenging in many applications. For example, when tuning hyperparameters for machine learning pipelines on a new problem given a limited budget, one must strike a balance between excluding potentially promising regions and keeping the search space small enough to be tractable. The goal of this work is to motivate -- through example applications in tuning deep neural networks -- the problem of predicting the quality of search spaces conditioned on budgets, as well as to provide a simple scoring method based on a utility function applied to a probabilistic response surface model, similar to Bayesian optimization. We show that the method we present can compute meaningful budget-conditional scores in a variety of situations. We also provide experimental evidence that accurate scores can be useful in constructing and pruning search spaces. Ultimately, we believe scoring search spaces should become standard practice in the experimental workflow for deep learning.
A Loss Curvature Perspective on Training Instability in Deep Learning
Oct 08, 2021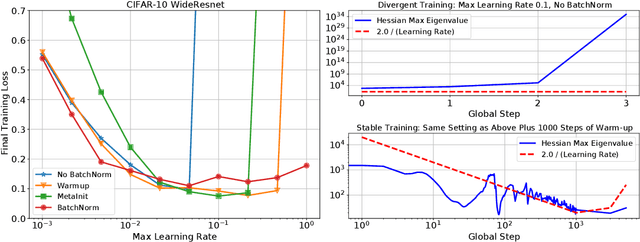
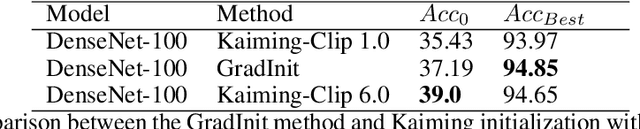
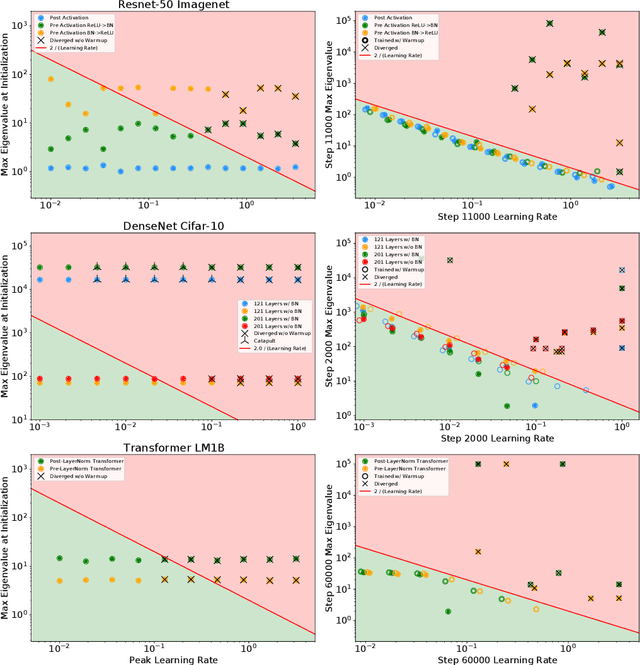
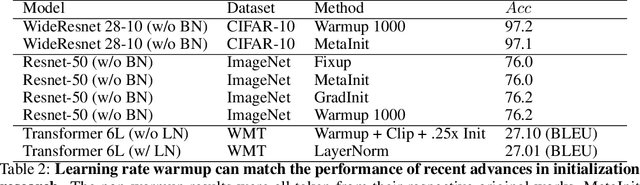
In this work, we study the evolution of the loss Hessian across many classification tasks in order to understand the effect the curvature of the loss has on the training dynamics. Whereas prior work has focused on how different learning rates affect the loss Hessian observed during training, we also analyze the effects of model initialization, architectural choices, and common training heuristics such as gradient clipping and learning rate warmup. Our results demonstrate that successful model and hyperparameter choices allow the early optimization trajectory to either avoid -- or navigate out of -- regions of high curvature and into flatter regions that tolerate a higher learning rate. Our results suggest a unifying perspective on how disparate mitigation strategies for training instability ultimately address the same underlying failure mode of neural network optimization, namely poor conditioning. Inspired by the conditioning perspective, we show that learning rate warmup can improve training stability just as much as batch normalization, layer normalization, MetaInit, GradInit, and Fixup initialization.
Uncertainty Baselines: Benchmarks for Uncertainty & Robustness in Deep Learning
Jun 07, 2021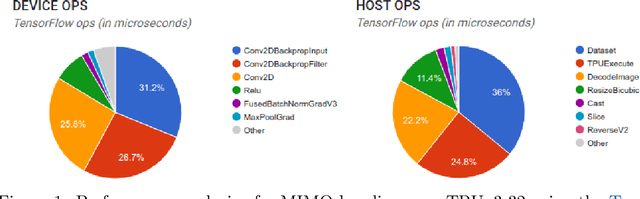
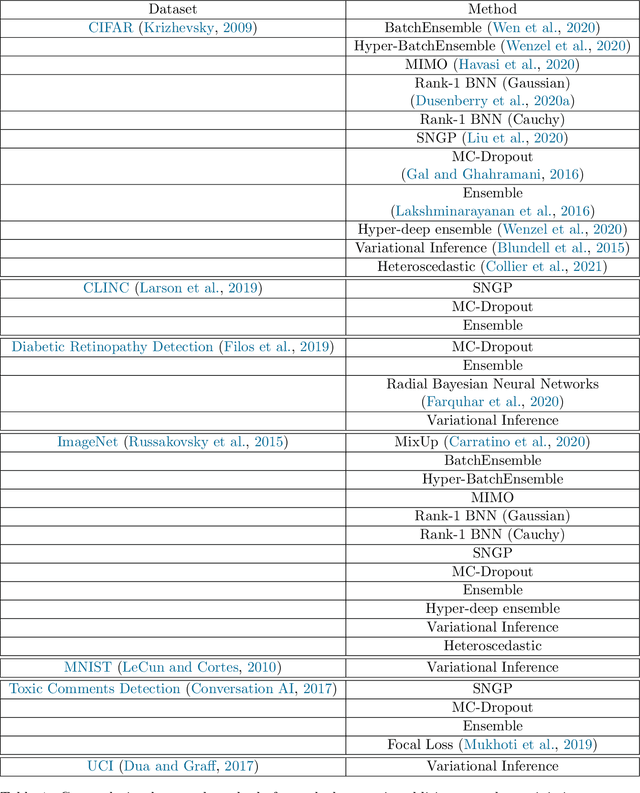
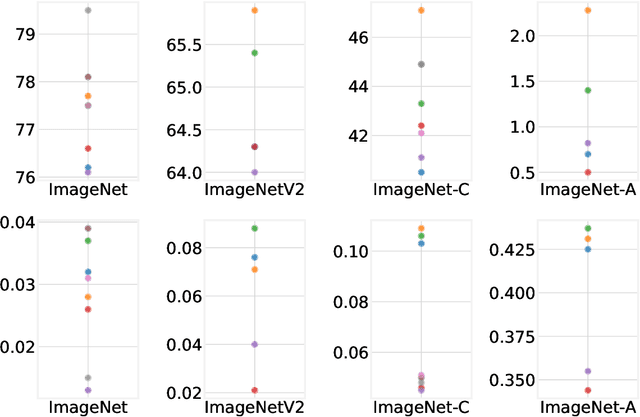
High-quality estimates of uncertainty and robustness are crucial for numerous real-world applications, especially for deep learning which underlies many deployed ML systems. The ability to compare techniques for improving these estimates is therefore very important for research and practice alike. Yet, competitive comparisons of methods are often lacking due to a range of reasons, including: compute availability for extensive tuning, incorporation of sufficiently many baselines, and concrete documentation for reproducibility. In this paper we introduce Uncertainty Baselines: high-quality implementations of standard and state-of-the-art deep learning methods on a variety of tasks. As of this writing, the collection spans 19 methods across 9 tasks, each with at least 5 metrics. Each baseline is a self-contained experiment pipeline with easily reusable and extendable components. Our goal is to provide immediate starting points for experimentation with new methods or applications. Additionally we provide model checkpoints, experiment outputs as Python notebooks, and leaderboards for comparing results. Code available at https://github.com/google/uncertainty-baselines.
A Large Batch Optimizer Reality Check: Traditional, Generic Optimizers Suffice Across Batch Sizes
Feb 16, 2021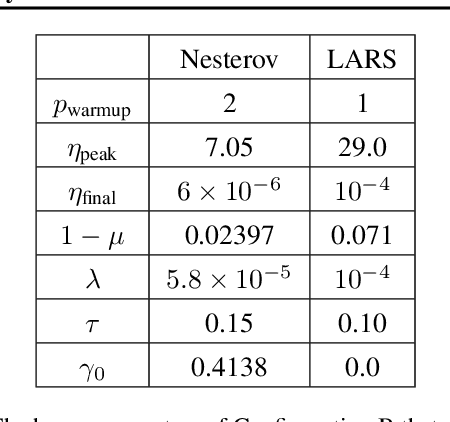
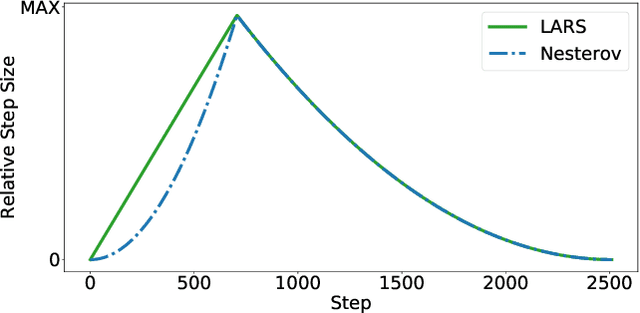
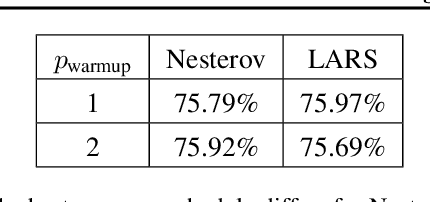
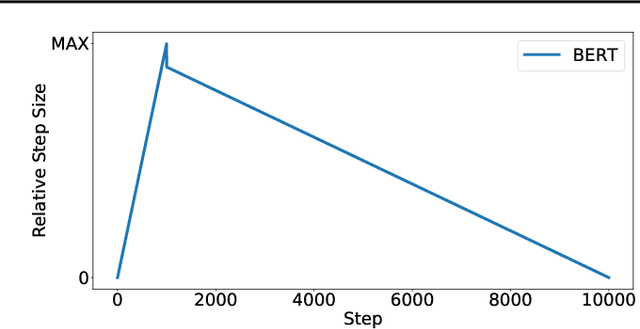
Recently the LARS and LAMB optimizers have been proposed for training neural networks faster using large batch sizes. LARS and LAMB add layer-wise normalization to the update rules of Heavy-ball momentum and Adam, respectively, and have become popular in prominent benchmarks and deep learning libraries. However, without fair comparisons to standard optimizers, it remains an open question whether LARS and LAMB have any benefit over traditional, generic algorithms. In this work we demonstrate that standard optimization algorithms such as Nesterov momentum and Adam can match or exceed the results of LARS and LAMB at large batch sizes. Our results establish new, stronger baselines for future comparisons at these batch sizes and shed light on the difficulties of comparing optimizers for neural network training more generally.
Underspecification Presents Challenges for Credibility in Modern Machine Learning
Nov 06, 2020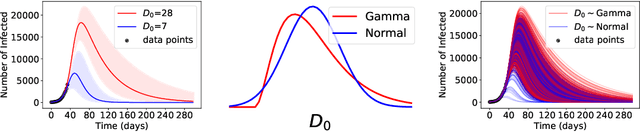


ML models often exhibit unexpectedly poor behavior when they are deployed in real-world domains. We identify underspecification as a key reason for these failures. An ML pipeline is underspecified when it can return many predictors with equivalently strong held-out performance in the training domain. Underspecification is common in modern ML pipelines, such as those based on deep learning. Predictors returned by underspecified pipelines are often treated as equivalent based on their training domain performance, but we show here that such predictors can behave very differently in deployment domains. This ambiguity can lead to instability and poor model behavior in practice, and is a distinct failure mode from previously identified issues arising from structural mismatch between training and deployment domains. We show that this problem appears in a wide variety of practical ML pipelines, using examples from computer vision, medical imaging, natural language processing, clinical risk prediction based on electronic health records, and medical genomics. Our results show the need to explicitly account for underspecification in modeling pipelines that are intended for real-world deployment in any domain.
Evaluating Prediction-Time Batch Normalization for Robustness under Covariate Shift
Jul 17, 2020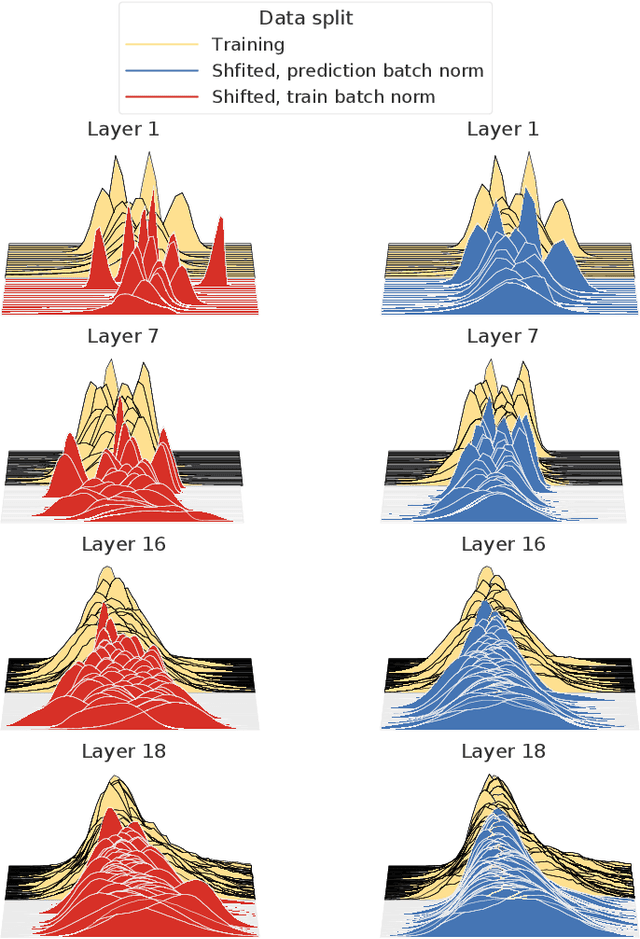
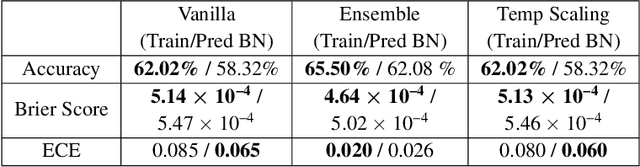
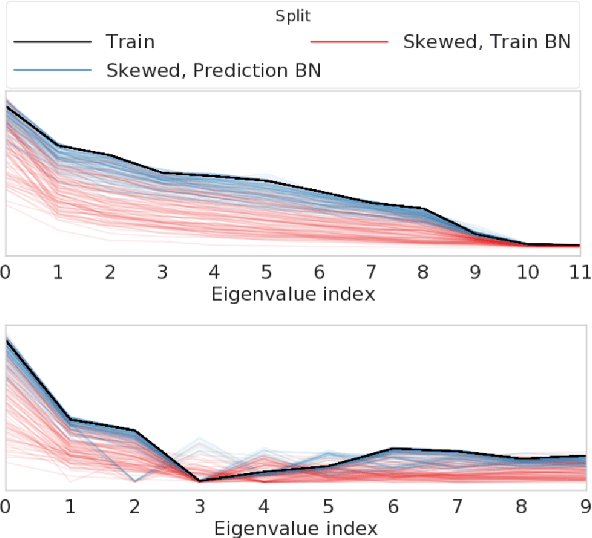
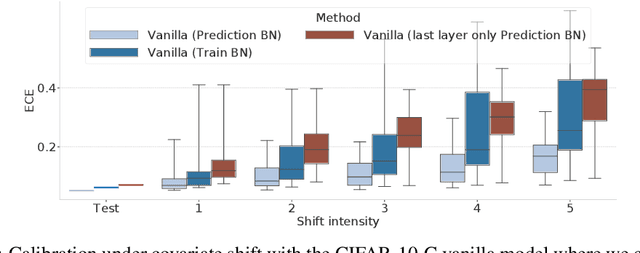
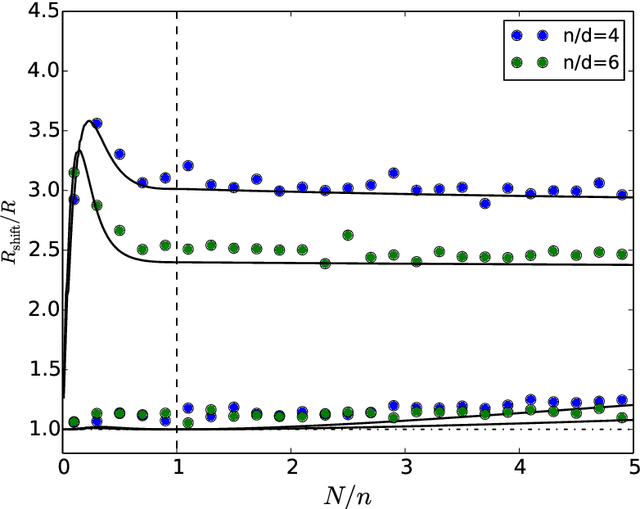
Covariate shift has been shown to sharply degrade both predictive accuracy and the calibration of uncertainty estimates for deep learning models. This is worrying, because covariate shift is prevalent in a wide range of real world deployment settings. However, in this paper, we note that frequently there exists the potential to access small unlabeled batches of the shifted data just before prediction time. This interesting observation enables a simple but surprisingly effective method which we call prediction-time batch normalization, which significantly improves model accuracy and calibration under covariate shift. Using this one line code change, we achieve state-of-the-art on recent covariate shift benchmarks and an mCE of 60.28\% on the challenging ImageNet-C dataset; to our knowledge, this is the best result for any model that does not incorporate additional data augmentation or modification of the training pipeline. We show that prediction-time batch normalization provides complementary benefits to existing state-of-the-art approaches for improving robustness (e.g. deep ensembles) and combining the two further improves performance. Our findings are supported by detailed measurements of the effect of this strategy on model behavior across rigorous ablations on various dataset modalities. However, the method has mixed results when used alongside pre-training, and does not seem to perform as well under more natural types of dataset shift, and is therefore worthy of additional study. We include links to the data in our figures to improve reproducibility, including a Python notebooks that can be run to easily modify our analysis at https://colab.research.google.com/drive/11N0wDZnMQQuLrRwRoumDCrhSaIhkqjof.
Revisiting One-vs-All Classifiers for Predictive Uncertainty and Out-of-Distribution Detection in Neural Networks
Jul 10, 2020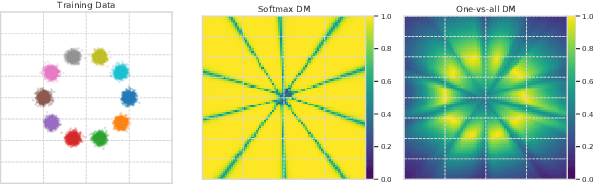
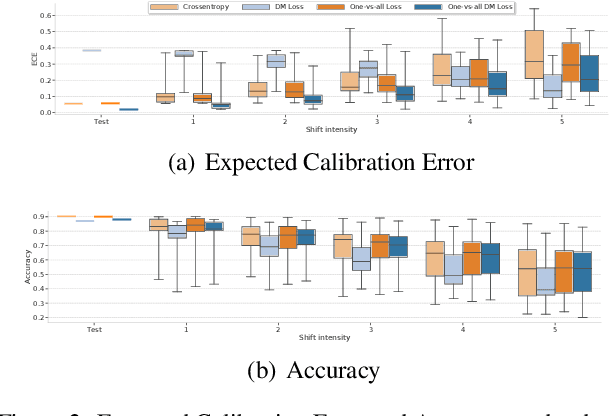
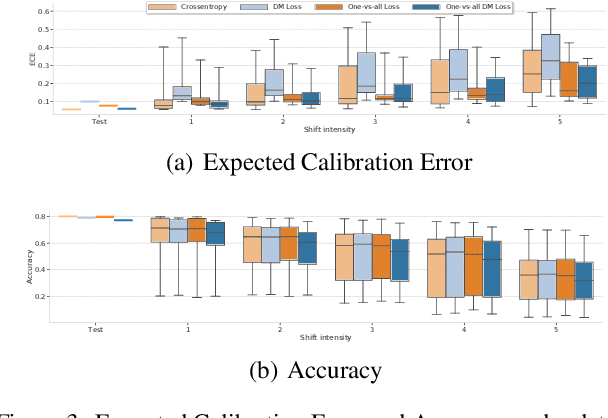
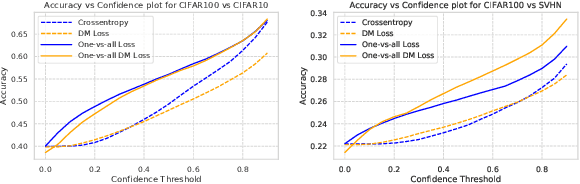
Accurate estimation of predictive uncertainty in modern neural networks is critical to achieve well calibrated predictions and detect out-of-distribution (OOD) inputs. The most promising approaches have been predominantly focused on improving model uncertainty (e.g. deep ensembles and Bayesian neural networks) and post-processing techniques for OOD detection (e.g. ODIN and Mahalanobis distance). However, there has been relatively little investigation into how the parametrization of the probabilities in discriminative classifiers affects the uncertainty estimates, and the dominant method, softmax cross-entropy, results in misleadingly high confidences on OOD data and under covariate shift. We investigate alternative ways of formulating probabilities using (1) a one-vs-all formulation to capture the notion of "none of the above", and (2) a distance-based logit representation to encode uncertainty as a function of distance to the training manifold. We show that one-vs-all formulations can improve calibration on image classification tasks, while matching the predictive performance of softmax without incurring any additional training or test-time complexity.
On Empirical Comparisons of Optimizers for Deep Learning
Oct 11, 2019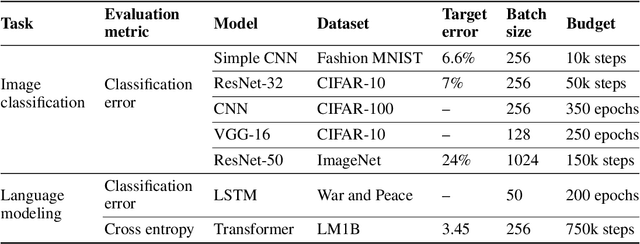
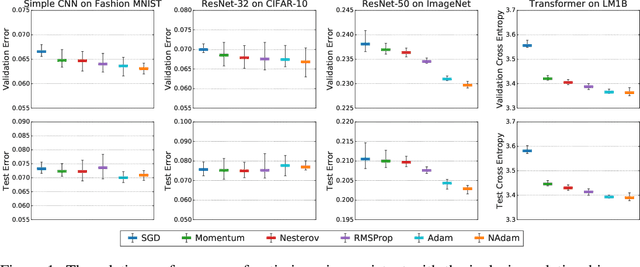
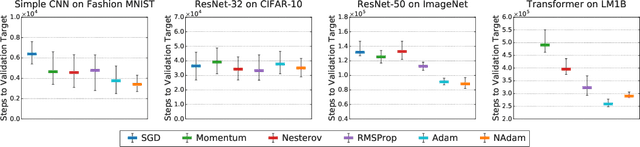
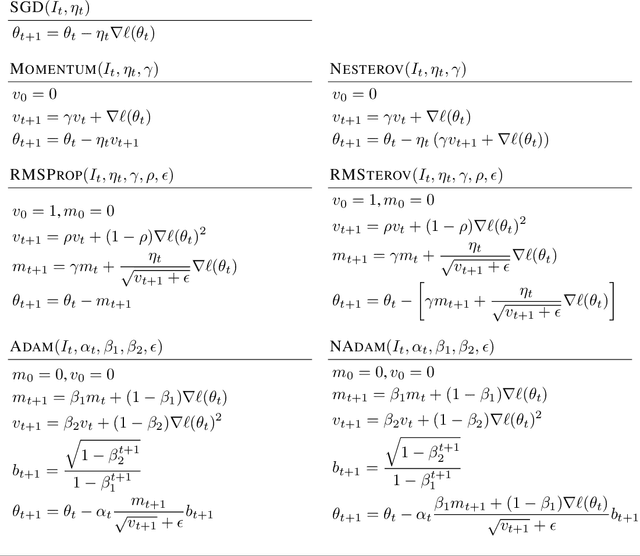
Selecting an optimizer is a central step in the contemporary deep learning pipeline. In this paper, we demonstrate the sensitivity of optimizer comparisons to the metaparameter tuning protocol. Our findings suggest that the metaparameter search space may be the single most important factor explaining the rankings obtained by recent empirical comparisons in the literature. In fact, we show that these results can be contradicted when metaparameter search spaces are changed. As tuning effort grows without bound, more general optimizers should never underperform the ones they can approximate (i.e., Adam should never perform worse than momentum), but recent attempts to compare optimizers either assume these inclusion relationships are not practically relevant or restrict the metaparameters in ways that break the inclusions. In our experiments, we find that inclusion relationships between optimizers matter in practice and always predict optimizer comparisons. In particular, we find that the popular adaptive gradient methods never underperform momentum or gradient descent. We also report practical tips around tuning often ignored metaparameters of adaptive gradient methods and raise concerns about fairly benchmarking optimizers for neural network training.
Which Algorithmic Choices Matter at Which Batch Sizes? Insights From a Noisy Quadratic Model
Jul 09, 2019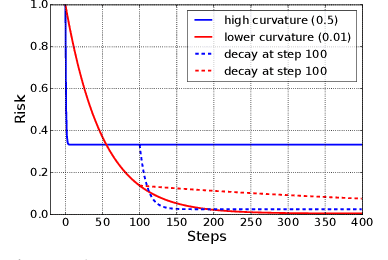
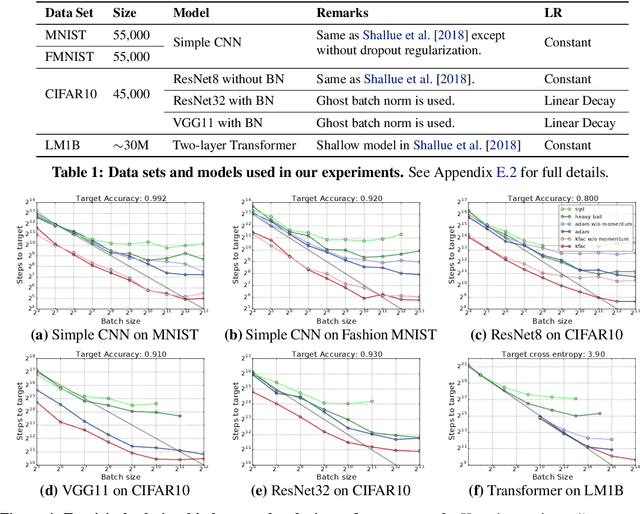
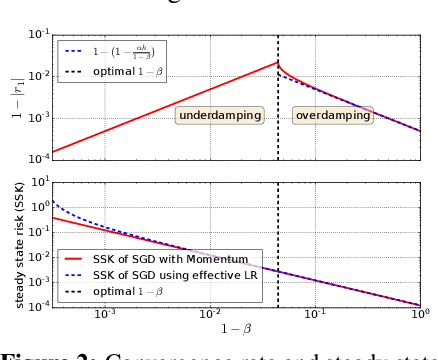
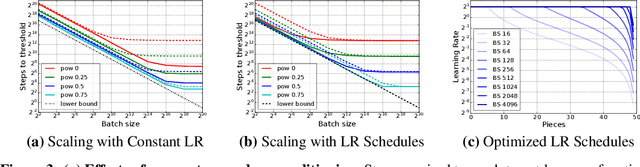
Increasing the batch size is a popular way to speed up neural network training, but beyond some critical batch size, larger batch sizes yield diminishing returns. In this work, we study how the critical batch size changes based on properties of the optimization algorithm, including acceleration and preconditioning, through two different lenses: large scale experiments, and analysis of a simple noisy quadratic model (NQM). We experimentally demonstrate that optimization algorithms that employ preconditioning, specifically Adam and K-FAC, result in much larger critical batch sizes than stochastic gradient descent with momentum. We also demonstrate that the NQM captures many of the essential features of real neural network training, despite being drastically simpler to work with. The NQM predicts our results with preconditioned optimizers, previous results with accelerated gradient descent, and other results around optimal learning rates and large batch training, making it a useful tool to generate testable predictions about neural network optimization.