 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRemote Labor Index: Measuring AI Automation of Remote Work
Oct 30, 2025AIs have made rapid progress on research-oriented benchmarks of knowledge and reasoning, but it remains unclear how these gains translate into economic value and automation. To measure this, we introduce the Remote Labor Index (RLI), a broadly multi-sector benchmark comprising real-world, economically valuable projects designed to evaluate end-to-end agent performance in practical settings. AI agents perform near the floor on RLI, with the highest-performing agent achieving an automation rate of 2.5%. These results help ground discussions of AI automation in empirical evidence, setting a common basis for tracking AI impacts and enabling stakeholders to proactively navigate AI-driven labor automation.
Collaborative Loco-Manipulation for Pick-and-Place Tasks with Dynamic Reward Curriculum
Sep 16, 2025We present a hierarchical RL pipeline for training one-armed legged robots to perform pick-and-place (P&P) tasks end-to-end -- from approaching the payload to releasing it at a target area -- in both single-robot and cooperative dual-robot settings. We introduce a novel dynamic reward curriculum that enables a single policy to efficiently learn long-horizon P&P operations by progressively guiding the agents through payload-centered sub-objectives. Compared to state-of-the-art approaches for long-horizon RL tasks, our method improves training efficiency by 55% and reduces execution time by 18.6% in simulation experiments. In the dual-robot case, we show that our policy enables each robot to attend to different components of its observation space at distinct task stages, promoting effective coordination via autonomous attention shifts. We validate our method through real-world experiments using ANYmal D platforms in both single- and dual-robot scenarios. To our knowledge, this is the first RL pipeline that tackles the full scope of collaborative P&P with two legged manipulators.
Agent-RLVR: Training Software Engineering Agents via Guidance and Environment Rewards
Jun 13, 2025Reinforcement Learning from Verifiable Rewards (RLVR) has been widely adopted as the de facto method for enhancing the reasoning capabilities of large language models and has demonstrated notable success in verifiable domains like math and competitive programming tasks. However, the efficacy of RLVR diminishes significantly when applied to agentic environments. These settings, characterized by multi-step, complex problem solving, lead to high failure rates even for frontier LLMs, as the reward landscape is too sparse for effective model training via conventional RLVR. In this work, we introduce Agent-RLVR, a framework that makes RLVR effective in challenging agentic settings, with an initial focus on software engineering tasks. Inspired by human pedagogy, Agent-RLVR introduces agent guidance, a mechanism that actively steers the agent towards successful trajectories by leveraging diverse informational cues. These cues, ranging from high-level strategic plans to dynamic feedback on the agent's errors and environmental interactions, emulate a teacher's guidance, enabling the agent to navigate difficult solution spaces and promotes active self-improvement via additional environment exploration. In the Agent-RLVR training loop, agents first attempt to solve tasks to produce initial trajectories, which are then validated by unit tests and supplemented with agent guidance. Agents then reattempt with guidance, and the agent policy is updated with RLVR based on the rewards of these guided trajectories. Agent-RLVR elevates the pass@1 performance of Qwen-2.5-72B-Instruct from 9.4% to 22.4% on SWE-Bench Verified. We find that our guidance-augmented RLVR data is additionally useful for test-time reward model training, shown by further boosting pass@1 to 27.8%. Agent-RLVR lays the groundwork for training agents with RLVR in complex, real-world environments where conventional RL methods struggle.
Learning coordinated badminton skills for legged manipulators
May 29, 2025Coordinating the motion between lower and upper limbs and aligning limb control with perception are substantial challenges in robotics, particularly in dynamic environments. To this end, we introduce an approach for enabling legged mobile manipulators to play badminton, a task that requires precise coordination of perception, locomotion, and arm swinging. We propose a unified reinforcement learning-based control policy for whole-body visuomotor skills involving all degrees of freedom to achieve effective shuttlecock tracking and striking. This policy is informed by a perception noise model that utilizes real-world camera data, allowing for consistent perception error levels between simulation and deployment and encouraging learned active perception behaviors. Our method includes a shuttlecock prediction model, constrained reinforcement learning for robust motion control, and integrated system identification techniques to enhance deployment readiness. Extensive experimental results in a variety of environments validate the robot's capability to predict shuttlecock trajectories, navigate the service area effectively, and execute precise strikes against human players, demonstrating the feasibility of using legged mobile manipulators in complex and dynamic sports scenarios.
* Science Robotics DOI: 10.1126/scirobotics.adu3922
Learning to Open and Traverse Doors with a Legged Manipulator
Sep 07, 2024



Using doors is a longstanding challenge in robotics and is of significant practical interest in giving robots greater access to human-centric spaces. The task is challenging due to the need for online adaptation to varying door properties and precise control in manipulating the door panel and navigating through the confined doorway. To address this, we propose a learning-based controller for a legged manipulator to open and traverse through doors. The controller is trained using a teacher-student approach in simulation to learn robust task behaviors as well as estimate crucial door properties during the interaction. Unlike previous works, our approach is a single control policy that can handle both push and pull doors through learned behaviour which infers the opening direction during deployment without prior knowledge. The policy was deployed on the ANYmal legged robot with an arm and achieved a success rate of 95.0% in repeated trials conducted in an experimental setting. Additional experiments validate the policy's effectiveness and robustness to various doors and disturbances. A video overview of the method and experiments can be found at youtu.be/tQDZXN_k5NU.
IN-Sight: Interactive Navigation through Sight
Aug 01, 2024



Current visual navigation systems often treat the environment as static, lacking the ability to adaptively interact with obstacles. This limitation leads to navigation failure when encountering unavoidable obstructions. In response, we introduce IN-Sight, a novel approach to self-supervised path planning, enabling more effective navigation strategies through interaction with obstacles. Utilizing RGB-D observations, IN-Sight calculates traversability scores and incorporates them into a semantic map, facilitating long-range path planning in complex, maze-like environments. To precisely navigate around obstacles, IN-Sight employs a local planner, trained imperatively on a differentiable costmap using representation learning techniques. The entire framework undergoes end-to-end training within the state-of-the-art photorealistic Intel SPEAR Simulator. We validate the effectiveness of IN-Sight through extensive benchmarking in a variety of simulated scenarios and ablation studies. Moreover, we demonstrate the system's real-world applicability with zero-shot sim-to-real transfer, deploying our planner on the legged robot platform ANYmal, showcasing its practical potential for interactive navigation in real environments.
Learning Goal-Conditioned Representations for Language Reward Models
Jul 18, 2024



Techniques that learn improved representations via offline data or self-supervised objectives have shown impressive results in traditional reinforcement learning (RL). Nevertheless, it is unclear how improved representation learning can benefit reinforcement learning from human feedback (RLHF) on language models (LMs). In this work, we propose training reward models (RMs) in a contrastive, $\textit{goal-conditioned}$ fashion by increasing the representation similarity of future states along sampled preferred trajectories and decreasing the similarity along randomly sampled dispreferred trajectories. This objective significantly improves RM performance by up to 0.09 AUROC across challenging benchmarks, such as MATH and GSM8k. These findings extend to general alignment as well -- on the Helpful-Harmless dataset, we observe $2.3\%$ increase in accuracy. Beyond improving reward model performance, we show this way of training RM representations enables improved $\textit{steerability}$ because it allows us to evaluate the likelihood of an action achieving a particular goal-state (e.g., whether a solution is correct or helpful). Leveraging this insight, we find that we can filter up to $55\%$ of generated tokens during majority voting by discarding trajectories likely to end up in an "incorrect" state, which leads to significant cost savings. We additionally find that these representations can perform fine-grained control by conditioning on desired future goal-states. For example, we show that steering a Llama 3 model towards helpful generations with our approach improves helpfulness by $9.6\%$ over a supervised-fine-tuning trained baseline. Similarly, steering the model towards complex generations improves complexity by $21.6\%$ over the baseline. Overall, we find that training RMs in this contrastive, goal-conditioned fashion significantly improves performance and enables model steerability.
USat: A Unified Self-Supervised Encoder for Multi-Sensor Satellite Imagery
Dec 02, 2023



Large, self-supervised vision models have led to substantial advancements for automatically interpreting natural images. Recent works have begun tailoring these methods to remote sensing data which has rich structure with multi-sensor, multi-spectral, and temporal information providing massive amounts of self-labeled data that can be used for self-supervised pre-training. In this work, we develop a new encoder architecture called USat that can input multi-spectral data from multiple sensors for self-supervised pre-training. USat is a vision transformer with modified patch projection layers and positional encodings to model spectral bands with varying spatial scales from multiple sensors. We integrate USat into a Masked Autoencoder (MAE) self-supervised pre-training procedure and find that a pre-trained USat outperforms state-of-the-art self-supervised MAE models trained on remote sensing data on multiple remote sensing benchmark datasets (up to 8%) and leads to improvements in low data regimes (up to 7%). Code and pre-trained weights are available at https://github.com/stanfordmlgroup/USat .
Learning Arm-Assisted Fall Damage Reduction and Recovery for Legged Mobile Manipulators
Mar 09, 2023Adaptive falling and recovery skills greatly extend the applicability of robot deployments. In the case of legged mobile manipulators, the robot arm could adaptively stop the fall and assist the recovery. Prior works on falling and recovery strategies for legged mobile manipulators usually rely on assumptions such as inelastic collisions and falling in defined directions to enable real-time computation. This paper presents a learning-based approach to reducing fall damage and recovery. An asymmetric actor-critic training structure is used to train a time-invariant policy with time-varying reward functions. In simulated experiments, the policy recovers from 98.9\% of initial falling configurations. It reduces base contact impulse, peak joint internal forces, and base acceleration during the fall compared to the baseline methods. The trained control policy is deployed and extensively tested on the ALMA robot hardware. A video summarizing the proposed method and the hardware tests is available at https://youtu.be/avwg2HqGi8s.
Combining Learning-based Locomotion Policy with Model-based Manipulation for Legged Mobile Manipulators
Jan 11, 2022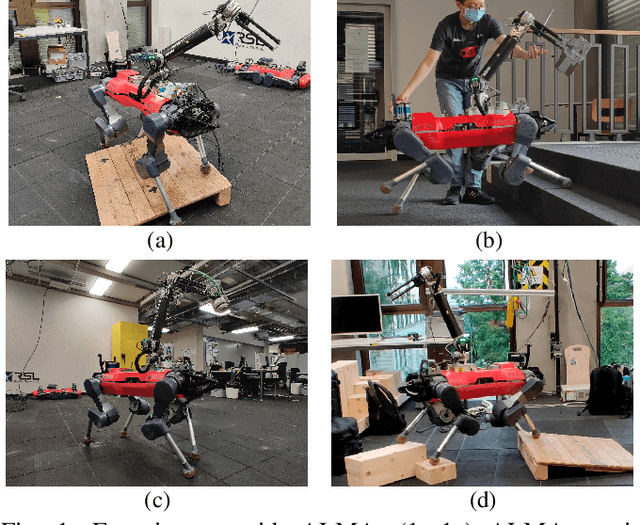
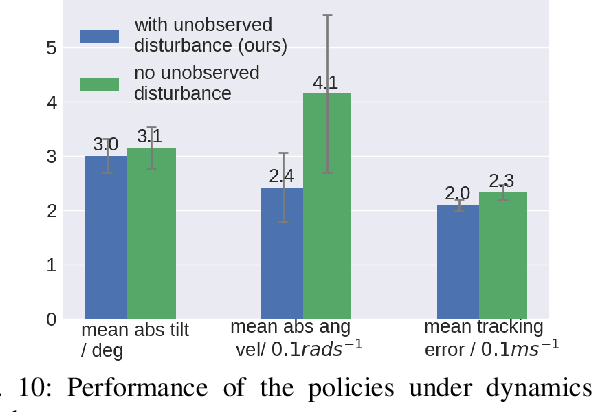
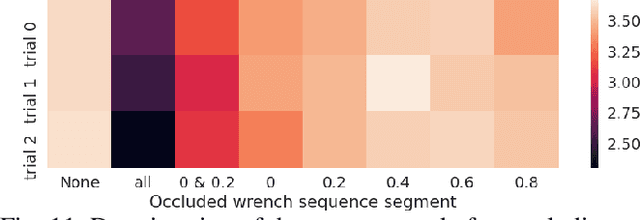
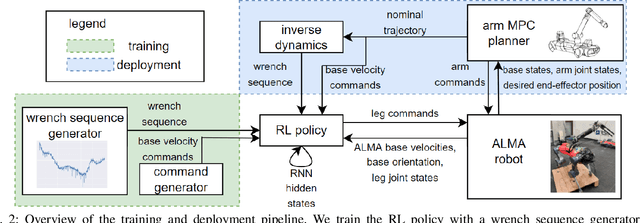
Deep reinforcement learning produces robust locomotion policies for legged robots over challenging terrains. To date, few studies have leveraged model-based methods to combine these locomotion skills with the precise control of manipulators. Here, we incorporate external dynamics plans into learning-based locomotion policies for mobile manipulation. We train the base policy by applying a random wrench sequence on the robot base in simulation and adding the noisified wrench sequence prediction to the policy observations. The policy then learns to counteract the partially-known future disturbance. The random wrench sequences are replaced with the wrench prediction generated with the dynamics plans from model predictive control to enable deployment. We show zero-shot adaptation for manipulators unseen during training. On the hardware, we demonstrate stable locomotion of legged robots with the prediction of the external wrench.